
基于到达角和到达时间联合估计的单基站定位方法及系统.pdf

Ro****44

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于到达角和到达时间联合估计的单基站定位方法及系统.pdf
本发明提供了一种基于到达角和到达时间联合估计的单基站定位方法及系统,该定位方法包括:步骤S1,对接收的信号,采用3D‑MUSIC算法进行粗估计,得到粗估计的方位角、仰视角以及时延;步骤S2,对步骤S1得到的粗估计的结果进一步细化,利用细估计的三维角度与时延计算公式估算出方位角偏移量、仰视角偏移量与时延偏移量,进一步得到更新的方位角、更新的仰视角以及更新的时延;重复该步骤,进行反复迭代,直至完全收敛;步骤S3,输出迭代完成后得到的方位角、仰视角以及时延。本发明的技术方案的精度明显优于目前子空间类其他类型的算

基于到达时间差与到达角估计的CSI单节点室内定位方法研究的开题报告.docx
基于到达时间差与到达角估计的CSI单节点室内定位方法研究的开题报告一、选题背景及意义随着智能家居、智慧城市等领域的发展,室内定位作为关键技术被广泛应用。在室内定位中,利用CSI(ChannelStateInformation)作为位置相关特征量进行定位已经成为了研究的热点之一。CSI可以反映出信号在传输过程中所经历的各种变化,如传播路径损耗、多径效应等,使其成为了高精度、低成本的室内定位技术。当前,基于到达时间差(TimeDifferenceofArrival,TDOA)和到达角(AngleofArriv

基于到达时间差与到达角估计的CSI单节点室内定位方法研究的任务书.docx
基于到达时间差与到达角估计的CSI单节点室内定位方法研究的任务书一、课题背景近年来,室内定位技术越来越受到广泛关注。如何准确、实时地对室内用户进行定位已成为移动互联网等领域关注的热点之一。对于智能家居、室内导航、安防监控等应用场景,精准的室内定位技术是其发展的基础。目前,室内定位技术主要有基于WiFi、蓝牙、红外、声波等方法。但是,由于室内环境的复杂性和多样性,单一的方法难以保证准确性和实时性,这也成为该领域的研究难点。基于到达时间差(TimeofArrival,TOA)与到达角(AngleofArriv

估计到达时间的系统和方法.pdf
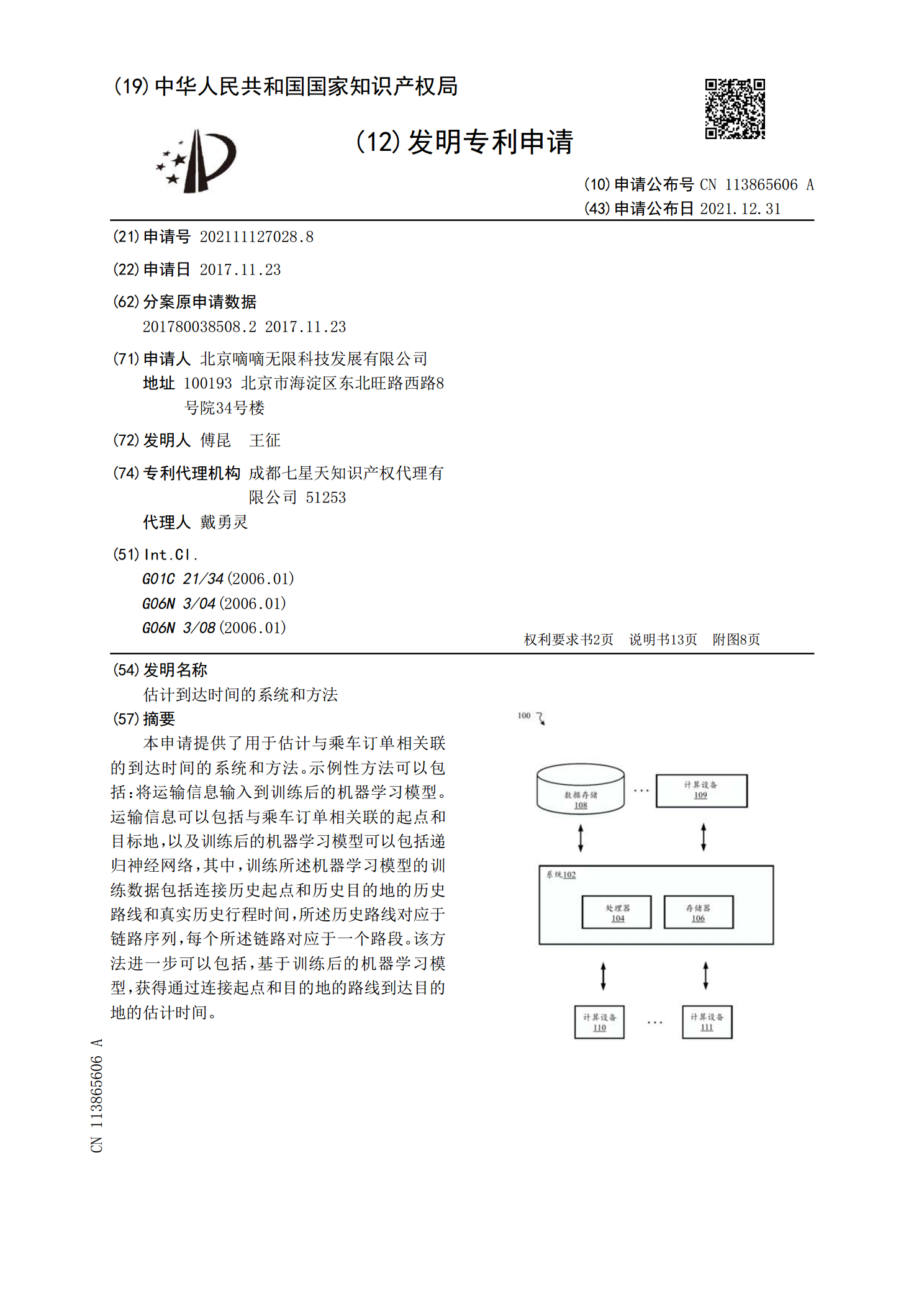
本申请提供了用于估计与乘车订单相关联的到达时间的系统和方法。示例性方法可以包括:将运输信息输入到训练后的机器学习模型。运输信息可以包括与乘车订单相关联的起点和目标地,以及训练后的机器学习模型可以包括广度网络和深度神经网络。该方法进一步可以包括,基于训练后的机器学习模型,获得通过连接起点和目的地的路线到达目的地的估计时间。
估计到达时间的系统和方法.pdf
本申请提供了用于估计与乘车订单相关联的到达时间的系统和方法。示例性方法可以包括:将运输信息输入到训练后的机器学习模型。运输信息可以包括与乘车订单相关联的起点和目标地,以及训练后的机器学习模型可以包括递归神经网络,其中,训练所述机器学习模型的训练数据包括连接历史起点和历史目的地的历史路线和真实历史行程时间,所述历史路线对应于链路序列,每个所述链路对应于一个路段。该方法进一步可以包括,基于训练后的机器学习模型,获得通过连接起点和目的地的路线到达目的地的估计时间。