
一种多旋翼无人机状态监测装置.pdf

猫巷****雪凝

1/8
2/8
3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多旋翼无人机状态监测装置.pdf
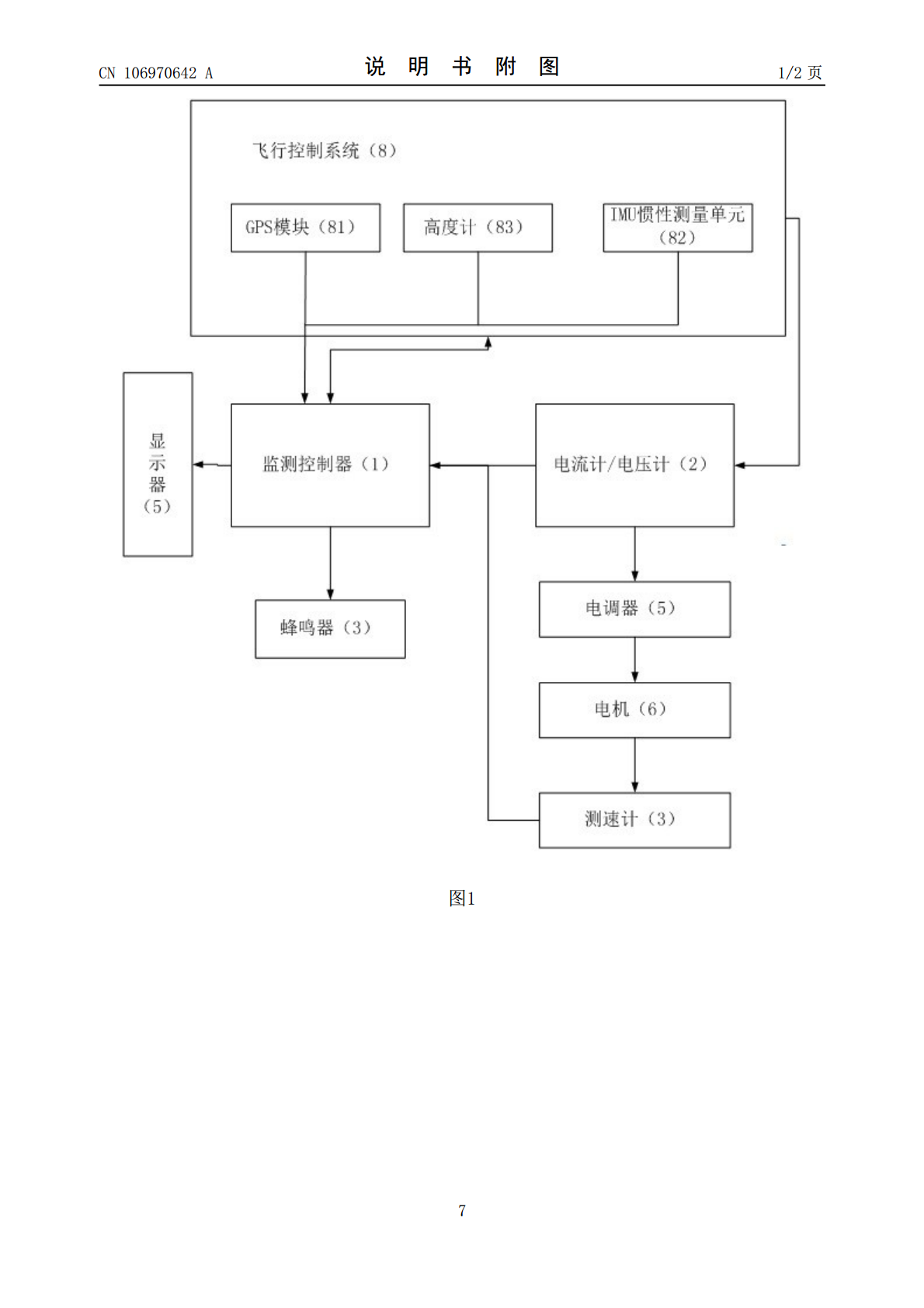
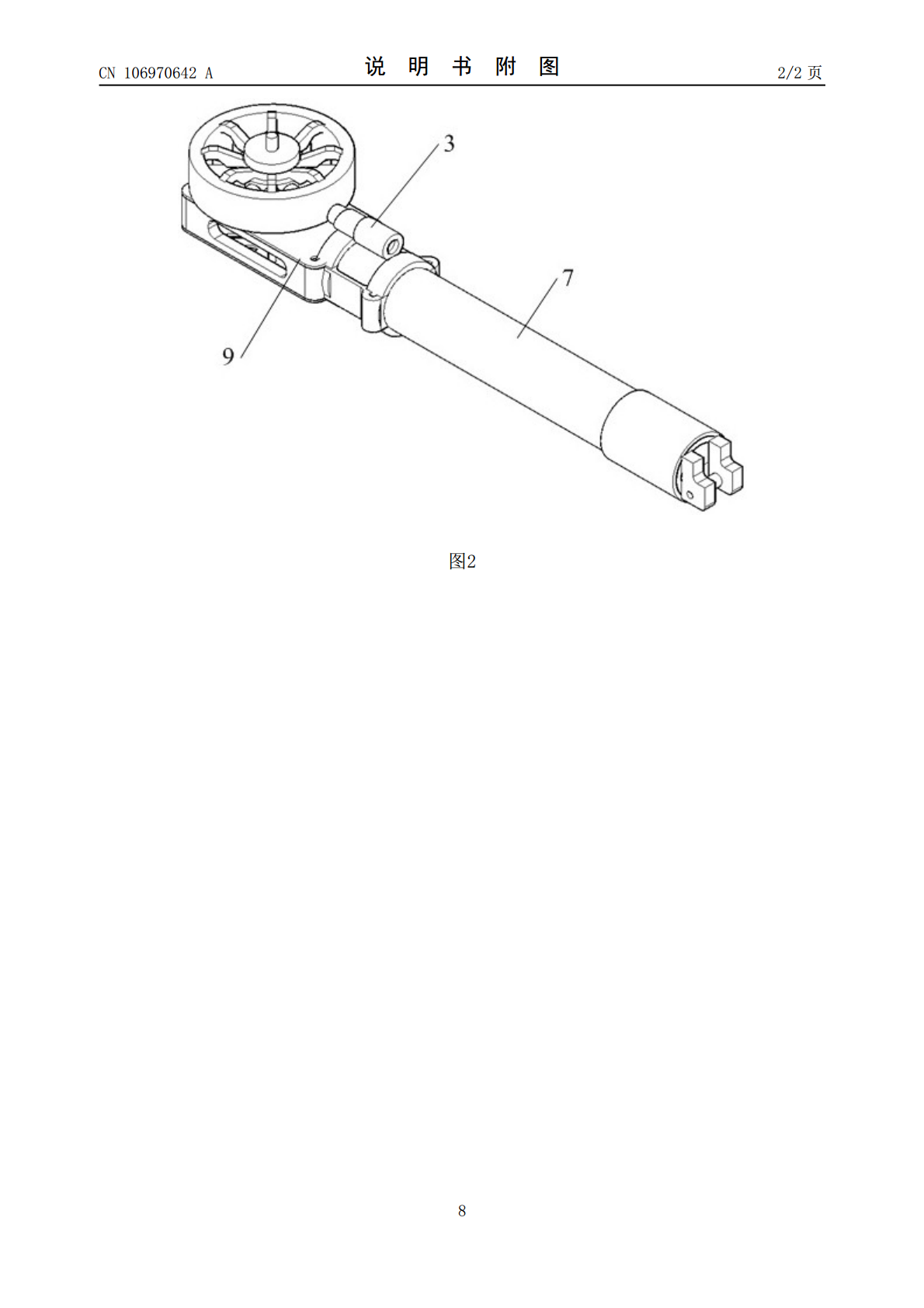
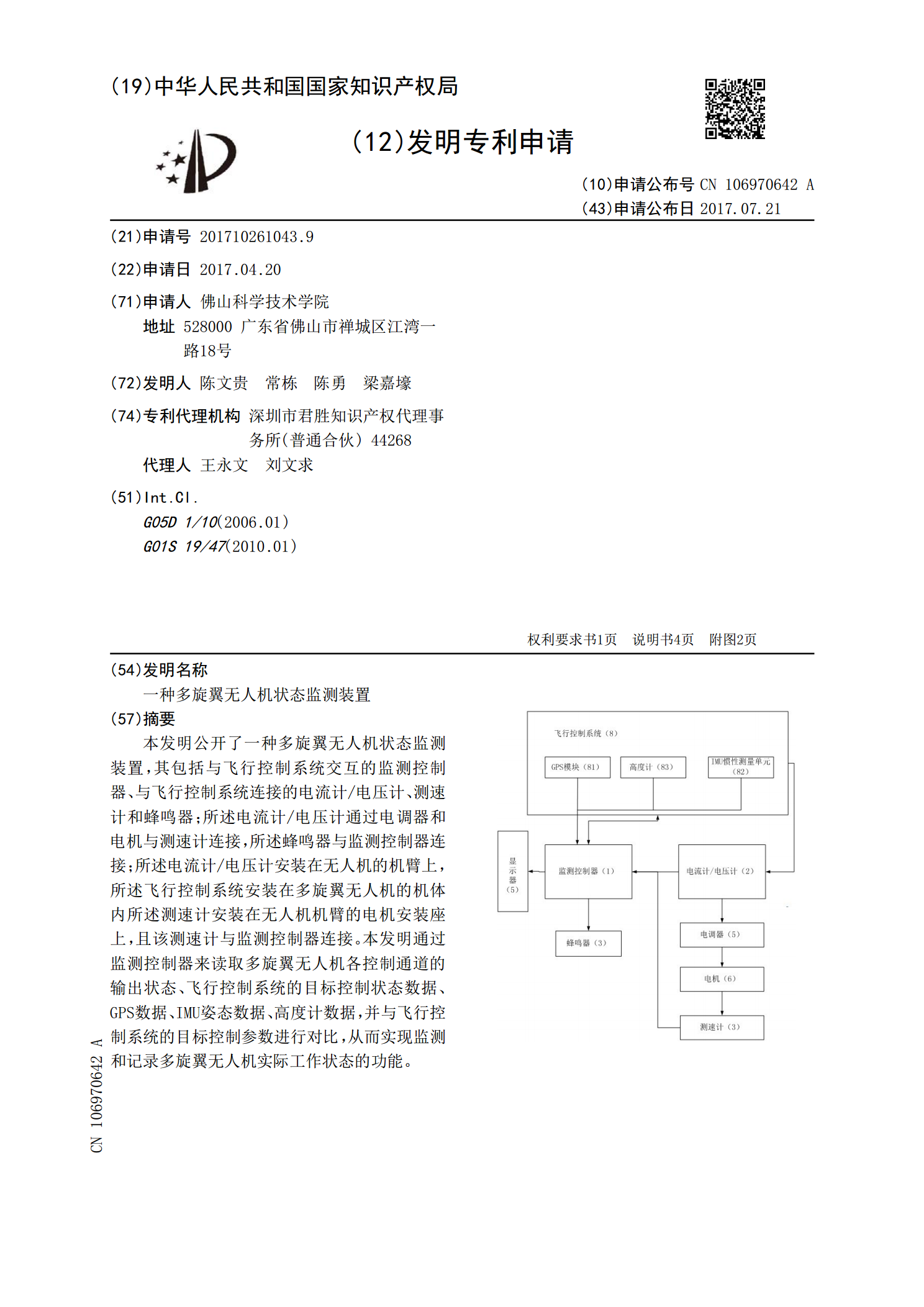
本发明公开了一种多旋翼无人机状态监测装置,其包括与飞行控制系统交互的监测控制器、与飞行控制系统连接的电流计/电压计、测速计和蜂鸣器;所述电流计/电压计通过电调器和电机与测速计连接,所述蜂鸣器与监测控制器连接;所述电流计/电压计安装在无人机的机臂上,所述飞行控制系统安装在多旋翼无人机的机体内所述测速计安装在无人机机臂的电机安装座上,且该测速计与监测控制器连接。本发明通过监测控制器来读取多旋翼无人机各控制通道的输出状态、飞行控制系统的目标控制状态数据、GPS数据、IMU姿态数据、高度计数据,并与飞行控制系统的

一种散热效果好的多旋翼无人机散热装置及多旋翼无人机.pdf
本发明公开了一种散热效果好的多旋翼无人机散热装置及多旋翼无人机,属于无人机技术领域,目的在于提供一种散热效果好的多旋翼无人机散热装置及多旋翼无人机,解决现有多旋翼无人机没有散热装置的问题。散热装置包括连接架,连接架的一端上设置有散热器,散热器包括电机,电机与连接架连接,电机的输出轴连接有蜗杆,蜗杆的另一端连接有散热片,蜗杆上还设置有T型固定杆,T型固定杆的下端套设于蜗杆上,T型固定杆的左端铰接有连杆一,连杆一的另一端铰接有连杆二,连杆二的另一端铰接有连杆三,连杆三的另一端与T型固定杆的右端铰接于铰接点A,

一种多旋翼无人机及其电机装置.pdf
本实用新型公开了一种电机装置,包括用以驱动桨叶的电机,还包括与电机连接、用以防护电机的底座以及设于底座、用以显示当前运行是否正常的显示部。本实用新型还公开了一种包括上述电机装置的多旋翼无人机。上述电机装置通过模块化设计,可以使电机底座与显示部集成,以形成完整的模块,可以方便装置的维修与保养,从而可以大大降低物料成本,装配人员的人工成本,以及后续的维护成本。
一种多旋翼无人机降落装置.pdf
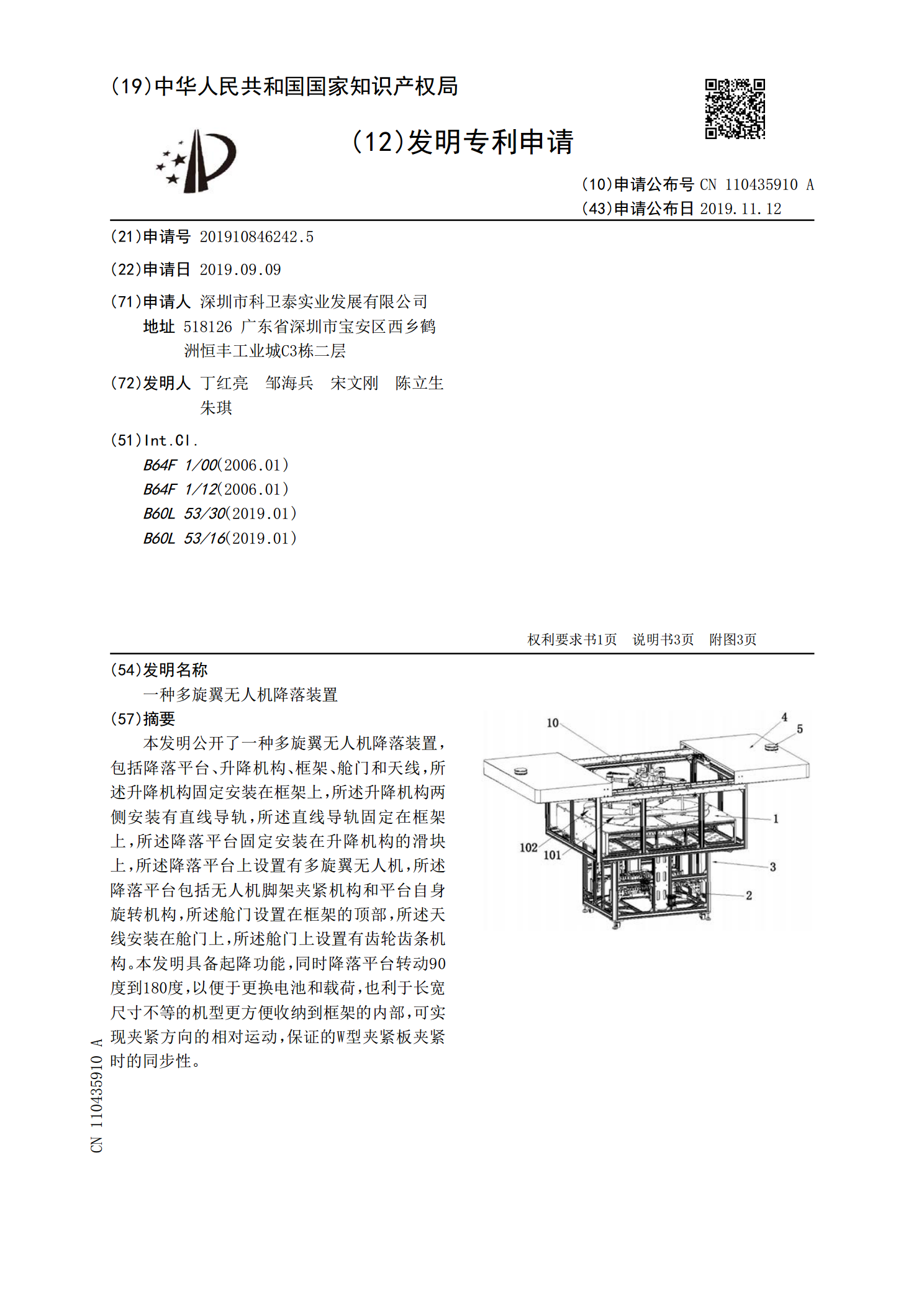
本发明公开了一种多旋翼无人机降落装置,包括降落平台、升降机构、框架、舱门和天线,所述升降机构固定安装在框架上,所述升降机构两侧安装有直线导轨,所述直线导轨固定在框架上,所述降落平台固定安装在升降机构的滑块上,所述降落平台上设置有多旋翼无人机,所述降落平台包括无人机脚架夹紧机构和平台自身旋转机构,所述舱门设置在框架的顶部,所述天线安装在舱门上,所述舱门上设置有齿轮齿条机构。本发明具备起降功能,同时降落平台转动90度到180度,以便于更换电池和载荷,也利于长宽尺寸不等的机型更方便收纳到框架的内部,可实现夹紧方

基于多旋翼无人机平台的输电线路状态监测方法研究.docx
基于多旋翼无人机平台的输电线路状态监测方法研究基于多旋翼无人机平台的输电线路状态监测方法研究摘要:随着电力行业的快速发展,输电线路的安全运行变得越来越重要。然而,由于传统的巡检方式受限于地形复杂性和人力资源的限制,无法实现对输电线路全面、高效的监测。为了解决这一问题,本文研究了基于多旋翼无人机平台的输电线路状态监测方法。通过分析无人机作为监测平台的优点,设计了相应的监测方案,并在实际线路上进行了试验。实验结果表明,基于多旋翼无人机平台的输电线路状态监测方法能够有效地提高线路监测的效率和准确性,为电力行业输