
贴胶装置以及电芯密封系统.pdf

雨巷****怡轩

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
贴胶装置以及电芯密封系统.pdf
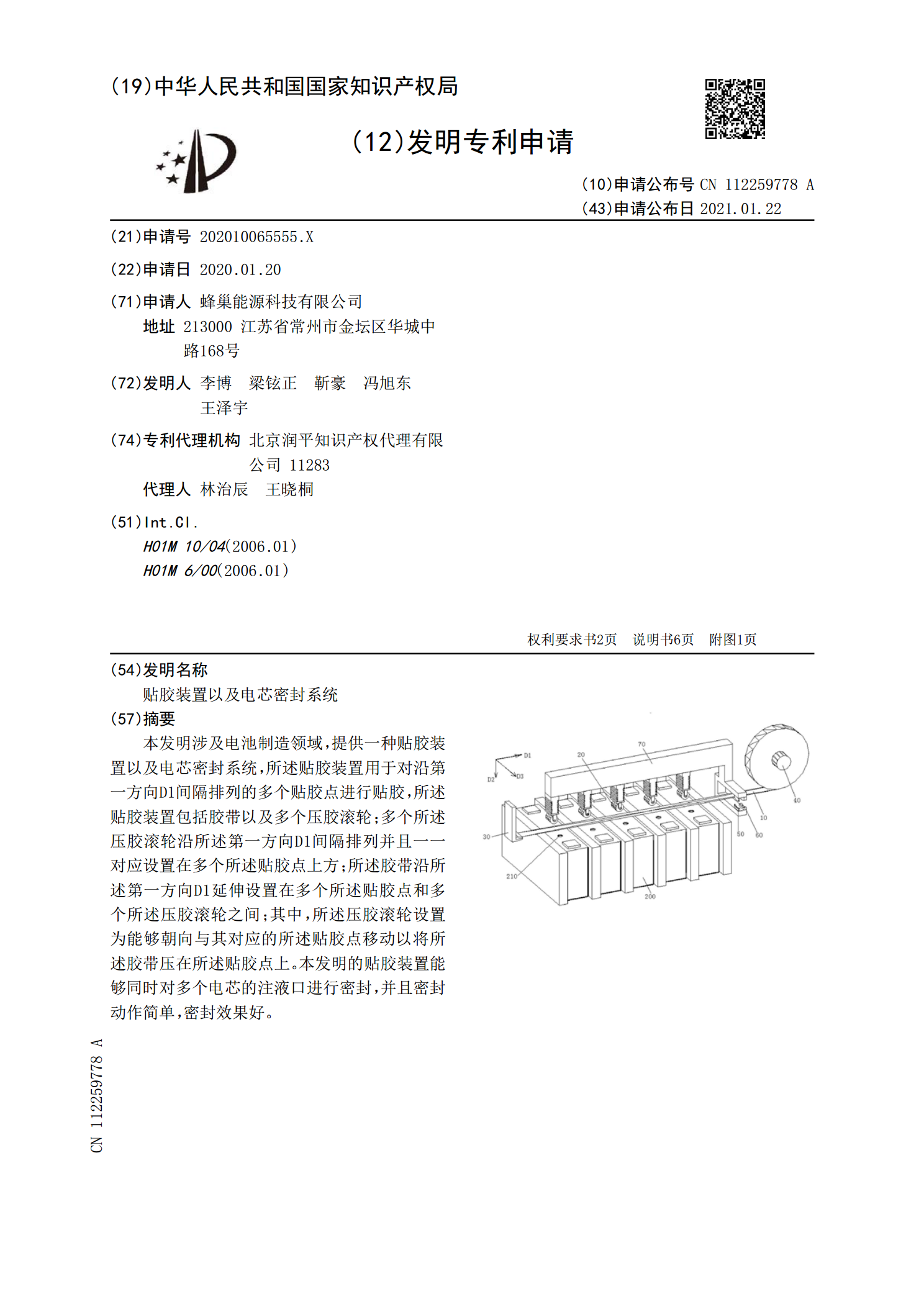
本发明涉及电池制造领域,提供一种贴胶装置以及电芯密封系统,所述贴胶装置用于对沿第一方向D1间隔排列的多个贴胶点进行贴胶,所述贴胶装置包括胶带以及多个压胶滚轮;多个所述压胶滚轮沿所述第一方向D1间隔排列并且一一对应设置在多个所述贴胶点上方;所述胶带沿所述第一方向D1延伸设置在多个所述贴胶点和多个所述压胶滚轮之间;其中,所述压胶滚轮设置为能够朝向与其对应的所述贴胶点移动以将所述胶带压在所述贴胶点上。本发明的贴胶装置能够同时对多个电芯的注液口进行密封,并且密封动作简单,密封效果好。
电芯贴胶装置及贴胶方法.pdf
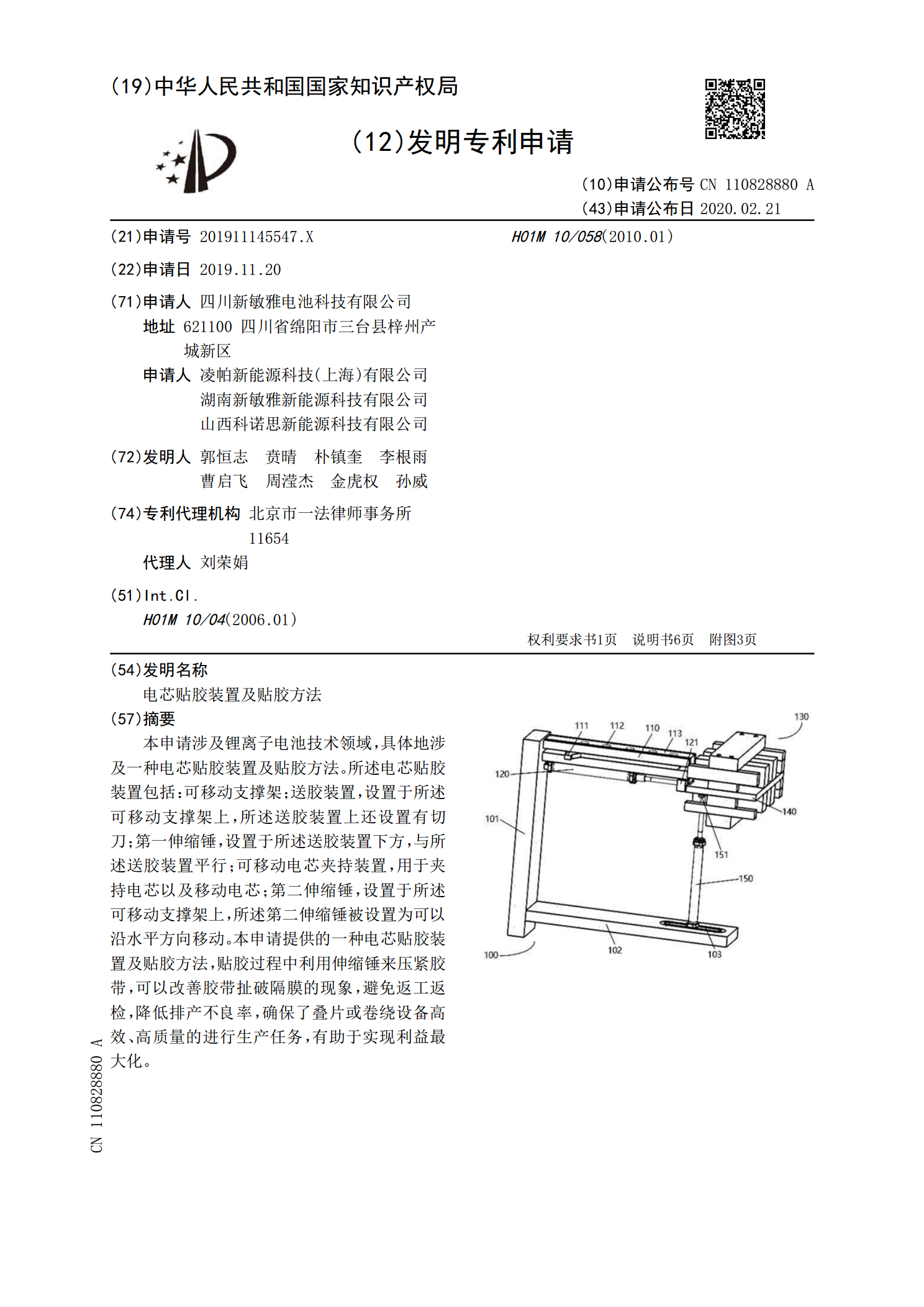
本申请涉及锂离子电池技术领域,具体地涉及一种电芯贴胶装置及贴胶方法。所述电芯贴胶装置包括:可移动支撑架;送胶装置,设置于所述可移动支撑架上,所述送胶装置上还设置有切刀;第一伸缩锤,设置于所述送胶装置下方,与所述送胶装置平行;可移动电芯夹持装置,用于夹持电芯以及移动电芯;第二伸缩锤,设置于所述可移动支撑架上,所述第二伸缩锤被设置为可以沿水平方向移动。本申请提供的一种电芯贴胶装置及贴胶方法,贴胶过程中利用伸缩锤来压紧胶带,可以改善胶带扯破隔膜的现象,避免返工返检,降低排产不良率,确保了叠片或卷绕设备高效、高质
电芯贴胶装置.pdf
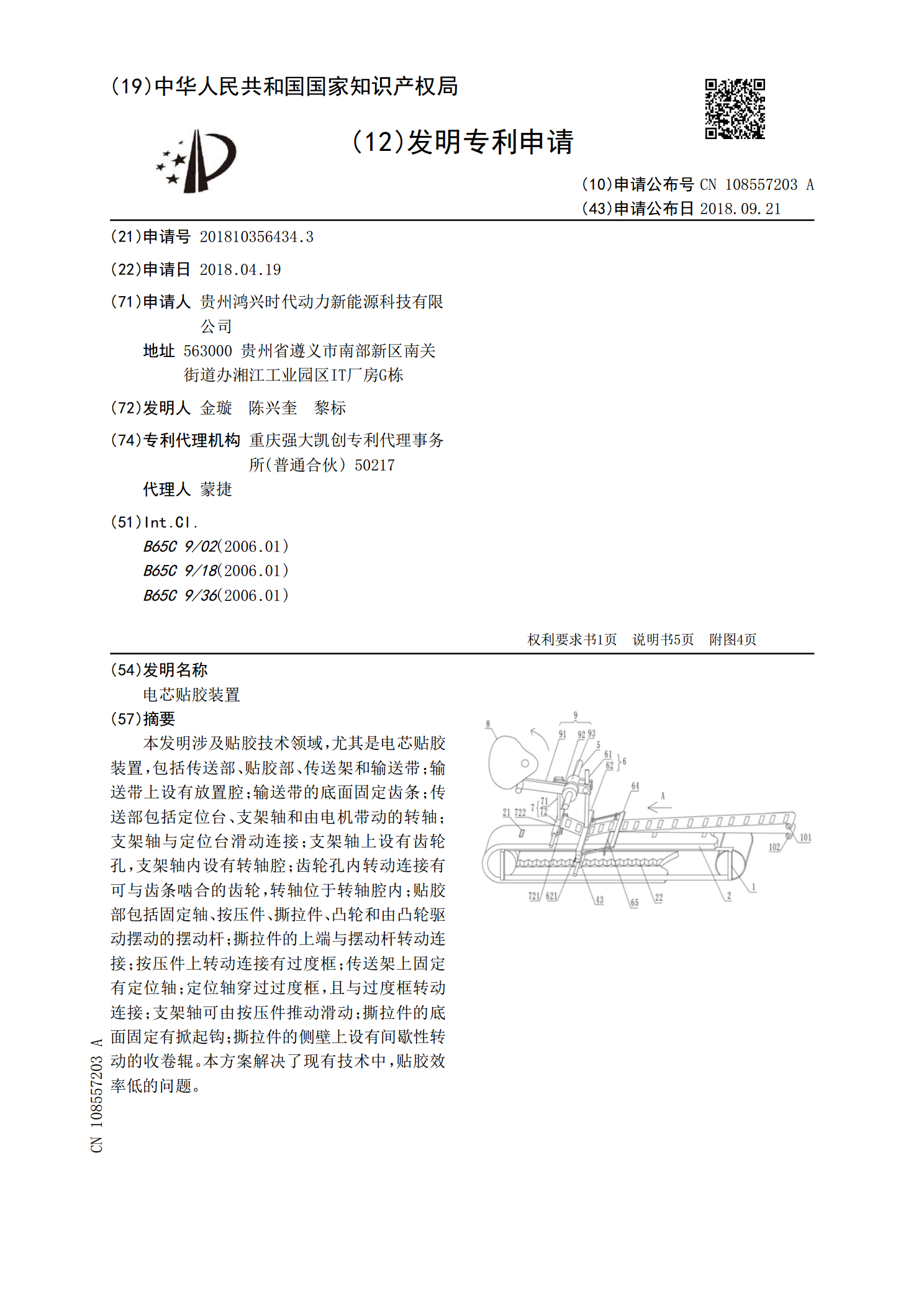
本发明涉及贴胶技术领域,尤其是电芯贴胶装置,包括传送部、贴胶部、传送架和输送带;输送带上设有放置腔;输送带的底面固定齿条;传送部包括定位台、支架轴和由电机带动的转轴;支架轴与定位台滑动连接;支架轴上设有齿轮孔,支架轴内设有转轴腔;齿轮孔内转动连接有可与齿条啮合的齿轮,转轴位于转轴腔内;贴胶部包括固定轴、按压件、撕拉件、凸轮和由凸轮驱动摆动的摆动杆;撕拉件的上端与摆动杆转动连接;按压件上转动连接有过度框;传送架上固定有定位轴;定位轴穿过过度框,且与过度框转动连接;支架轴可由按压件推动滑动;撕拉件的底面固定有

新型抗跌落软包卷绕电芯以及贴胶与贴胶方法.pdf
一种新型抗跌落软包卷绕电芯用贴胶以及一种使用该贴胶的新型抗跌落软包卷绕电芯。该贴胶包括:聚酯薄膜单面胶层;设置于聚酯薄膜单面胶层外侧的热熔胶层,热熔胶层的中部胶量大于热熔胶层的两侧胶量。热熔胶层采用曲面设计,在贴胶热压过程中热熔胶会流动,从而使得电池表面平整度更好。另外,热熔胶还能够起到更好的带走气体的作用。一种新型抗跌落软包卷绕电芯的贴胶方法。本发明采用热熔胶层既增加了电芯的抗跌落能力,又保证了最小的设计厚度,相比常规的双贴胶,厚度减小了20um,提升了~0.2%的体积能量密度。贴胶中,热熔胶层采用弧面
电芯贴胶机.pdf
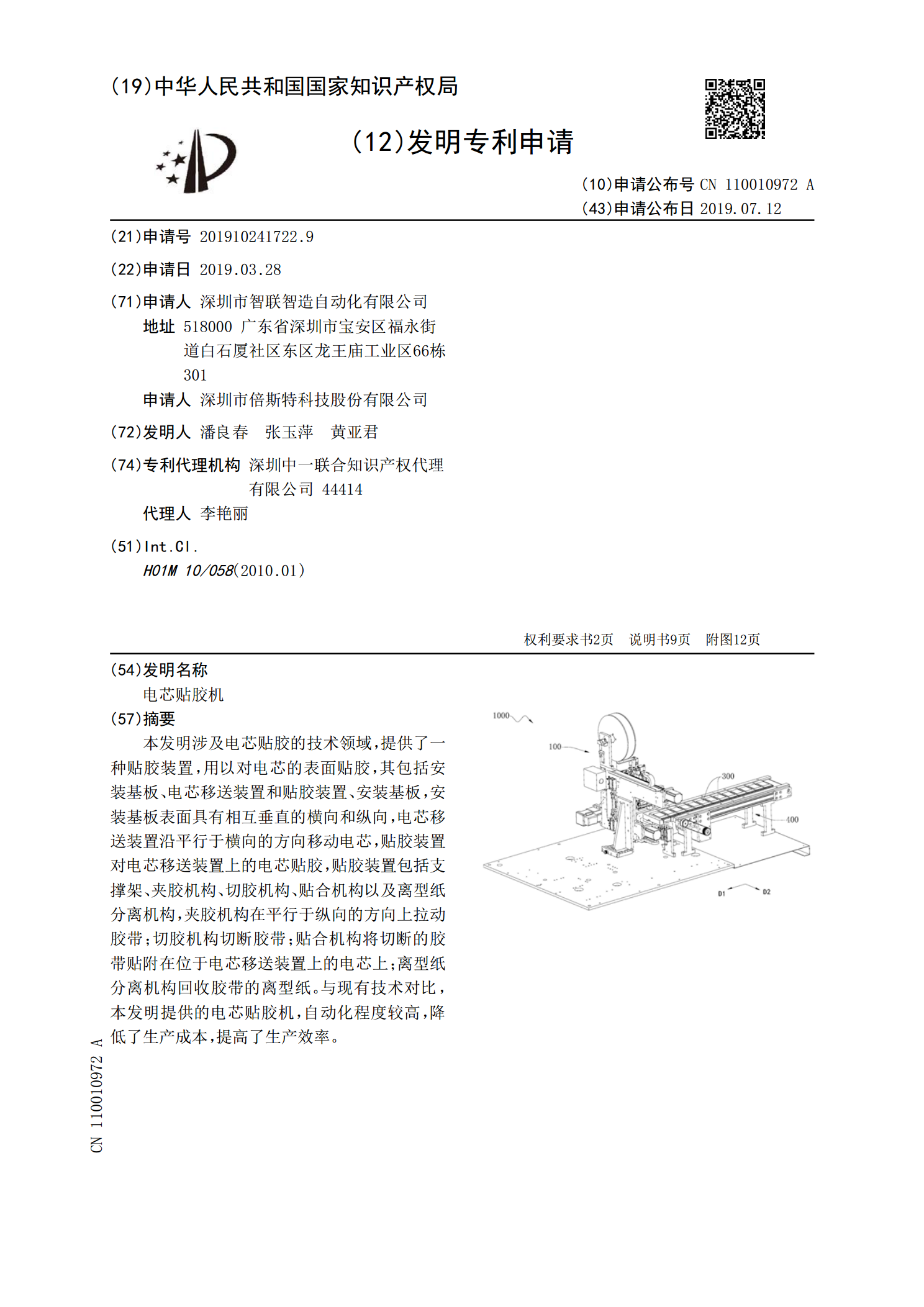
本发明涉及电芯贴胶的技术领域,提供了一种贴胶装置,用以对电芯的表面贴胶,其包括安装基板、电芯移送装置和贴胶装置、安装基板,安装基板表面具有相互垂直的横向和纵向,电芯移送装置沿平行于横向的方向移动电芯,贴胶装置对电芯移送装置上的电芯贴胶,贴胶装置包括支撑架、夹胶机构、切胶机构、贴合机构以及离型纸分离机构,夹胶机构在平行于纵向的方向上拉动胶带;切胶机构切断胶带;贴合机构将切断的胶带贴附在位于电芯移送装置上的电芯上;离型纸分离机构回收胶带的离型纸。与现有技术对比,本发明提供的电芯贴胶机,自动化程度较高,降低了生