
无人机蜂群的自定位方法及装置.pdf

骊蓉****23


1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人机蜂群的自定位方法及装置.pdf
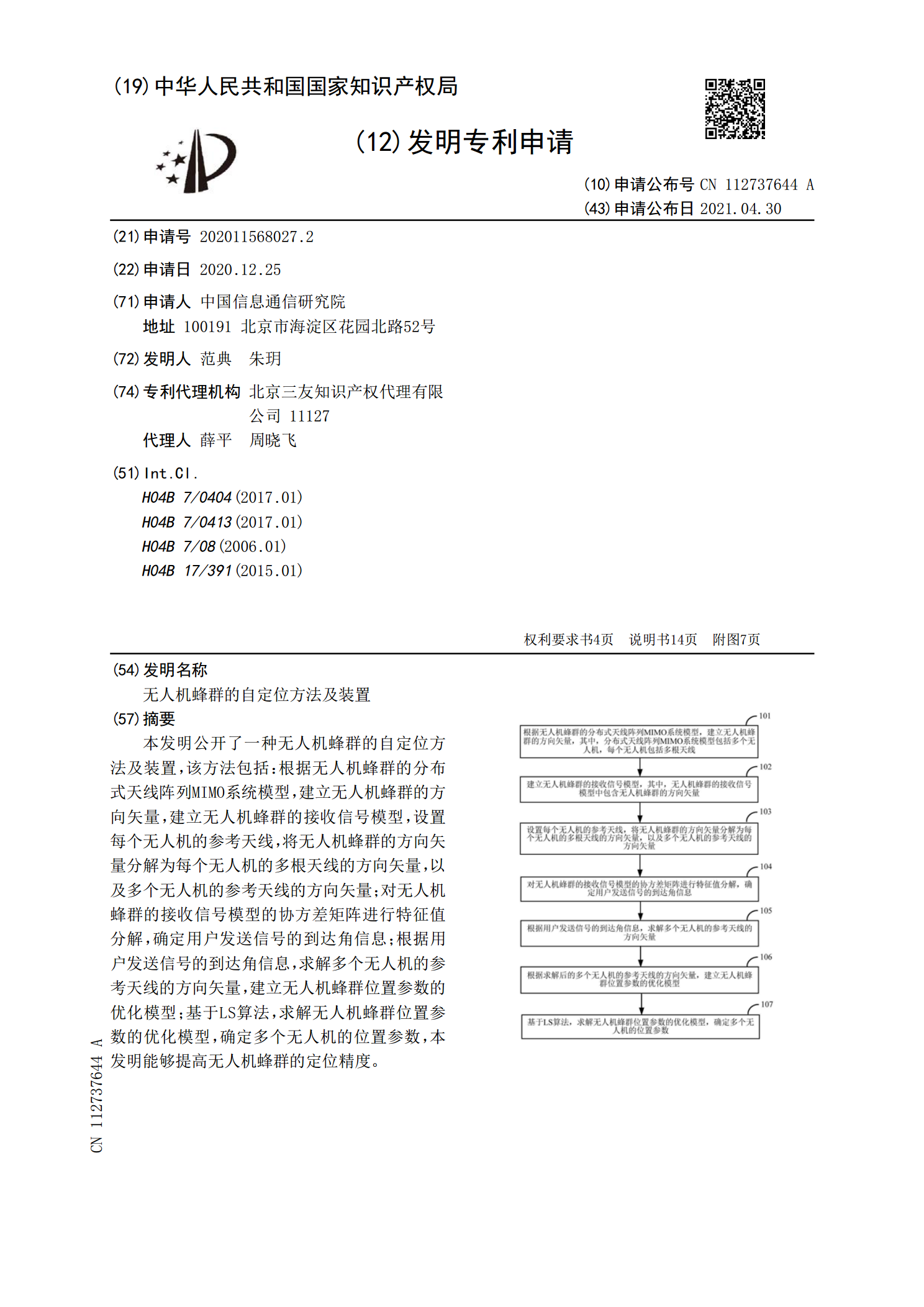
本发明公开了一种无人机蜂群的自定位方法及装置,该方法包括:根据无人机蜂群的分布式天线阵列MIMO系统模型,建立无人机蜂群的方向矢量,建立无人机蜂群的接收信号模型,设置每个无人机的参考天线,将无人机蜂群的方向矢量分解为每个无人机的多根天线的方向矢量,以及多个无人机的参考天线的方向矢量;对无人机蜂群的接收信号模型的协方差矩阵进行特征值分解,确定用户发送信号的到达角信息;根据用户发送信号的到达角信息,求解多个无人机的参考天线的方向矢量,建立无人机蜂群位置参数的优化模型;基于LS算法,求解无人机蜂群位置参数的优化
一种蜂群无人机的高精度定位方法.pdf
蜂群无人机已越来越广泛地应用在各领域,特别是面向未来城市作战的需求,室内外无缝的三维高精度定位是关键技术之一。本发明公开了一种蜂群无人机的高精度定位方法,承载在无人机上的通导一体化模块通过接收到云端中控系统的导航定位控制信息,采用包含复杂场景识别的多源融合定位方法,实时动态地解算无人机的飞行状态信息,并提供可靠、连续的室内外无缝三维高精度定位。任意无人机是属于锚点工作模式,或属于侦查工作模式,其状态可由云端中控系统依据定位精度、通信链路质量、组网拓扑等因素动态调整,包括周期性调整,或事件触发式调整。本发明

无人机蜂群协同探测方法、装置、设备及存储介质.pdf
本申请涉及区块链技术领域,提供一种无人机蜂群协同探测方法、装置、设备及存储介质。该方法包括:接收无人机蜂群所在区块链网络中的第一无人机节点的协同探测请求,并向无人机蜂群中除第一无人机节点之外的所有第二无人机节点广播;接收投票信息,并根据投票信息确定协同探测结果;将协同探测结果发送给第一无人机节点;当检测到第一无人机节点根据协同探测结果发起的上链请求时,对协同探测结果进行上链。通过将无人机蜂群作为区块链网络的节点直接参与区块链的共识过程,提高了无人机与区块链的耦合性,通过群体决策抑制恶意节点传输的虚假信息对

蜂群无人机的控制方法.pdf
本发明公开了一种蜂群无人机的控制方法,用于解决现有无人机控制方法实用性差的技术问题。技术方案是首先采用灰预测中的GM(1,1)模型对节点的度分布进行快速估算,再采用平均一致性算法计算全网平均度,根据MOLLY‑REED准则判断网络的连通性,进而控制其鲁棒性。本发明采用灰预测的GM(1,1)模型,解决了“蜂群”无人机因为链路质量变化快,任务执行周期短,无法满足“蜂群”无人机控制的技术问题。采用平均一致性算法,仅在相邻节点之间进行信息交互,避免了占用大量带宽、耗能高的全网泛洪广播。具有快速高效、占用带宽少以及

反无人机蜂群的防空部署方法、装置、设备和介质.pdf
本申请涉及反无人机蜂群的防空部署方法、装置、设备和介质,方法包括:获取无人机蜂群的探测跟踪数据;调用基于遗传算法的火力分配模型,根据探测跟踪数据对火力分配模型进行初始化;利用火力分配模型的适应度函数对全部染色体进行评价,计算并保存适应度值最大的目标染色体;采用轮盘赌选择算法对种群进行淘汰;根据交配概率从种群中选择染色体进行交配操作;根据变异概率从种群中选择染色体进行变异操作;将产生的新种群替换原有的种群,计算新种群中各染色体的适应度值;当前进化代数加1后,若进化代数超过设定的最大进化代数,则输出最优防空部