
一种蜂群无人机的高精度定位方法.pdf

Ma****57


1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种蜂群无人机的高精度定位方法.pdf
蜂群无人机已越来越广泛地应用在各领域,特别是面向未来城市作战的需求,室内外无缝的三维高精度定位是关键技术之一。本发明公开了一种蜂群无人机的高精度定位方法,承载在无人机上的通导一体化模块通过接收到云端中控系统的导航定位控制信息,采用包含复杂场景识别的多源融合定位方法,实时动态地解算无人机的飞行状态信息,并提供可靠、连续的室内外无缝三维高精度定位。任意无人机是属于锚点工作模式,或属于侦查工作模式,其状态可由云端中控系统依据定位精度、通信链路质量、组网拓扑等因素动态调整,包括周期性调整,或事件触发式调整。本发明
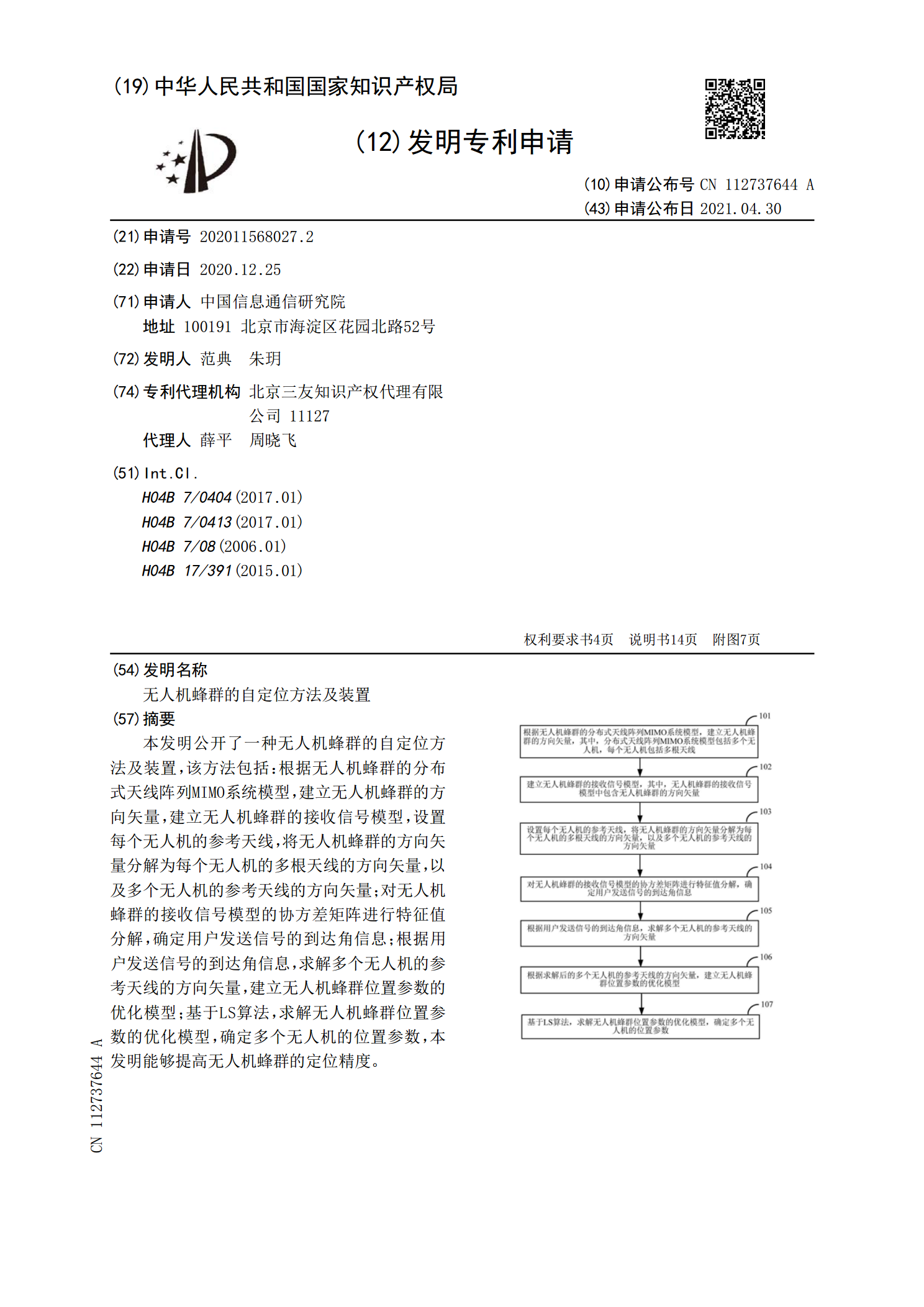
无人机蜂群的自定位方法及装置.pdf
本发明公开了一种无人机蜂群的自定位方法及装置,该方法包括:根据无人机蜂群的分布式天线阵列MIMO系统模型,建立无人机蜂群的方向矢量,建立无人机蜂群的接收信号模型,设置每个无人机的参考天线,将无人机蜂群的方向矢量分解为每个无人机的多根天线的方向矢量,以及多个无人机的参考天线的方向矢量;对无人机蜂群的接收信号模型的协方差矩阵进行特征值分解,确定用户发送信号的到达角信息;根据用户发送信号的到达角信息,求解多个无人机的参考天线的方向矢量,建立无人机蜂群位置参数的优化模型;基于LS算法,求解无人机蜂群位置参数的优化
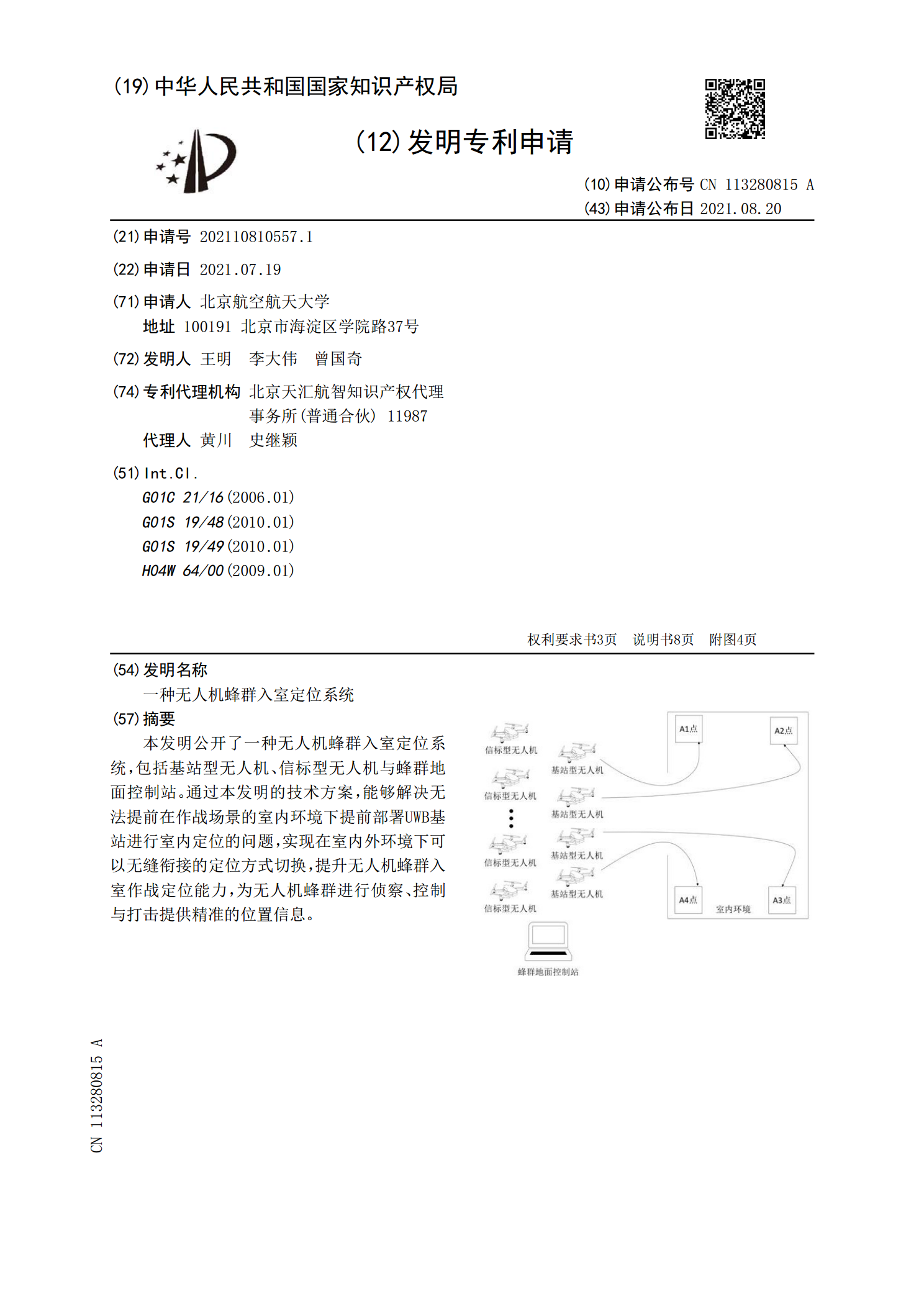
一种无人机蜂群入室定位系统.pdf
本发明公开了一种无人机蜂群入室定位系统,包括基站型无人机、信标型无人机与蜂群地面控制站。通过本发明的技术方案,能够解决无法提前在作战场景的室内环境下提前部署UWB基站进行室内定位的问题,实现在室内外环境下可以无缝衔接的定位方式切换,提升无人机蜂群入室作战定位能力,为无人机蜂群进行侦察、控制与打击提供精准的位置信息。
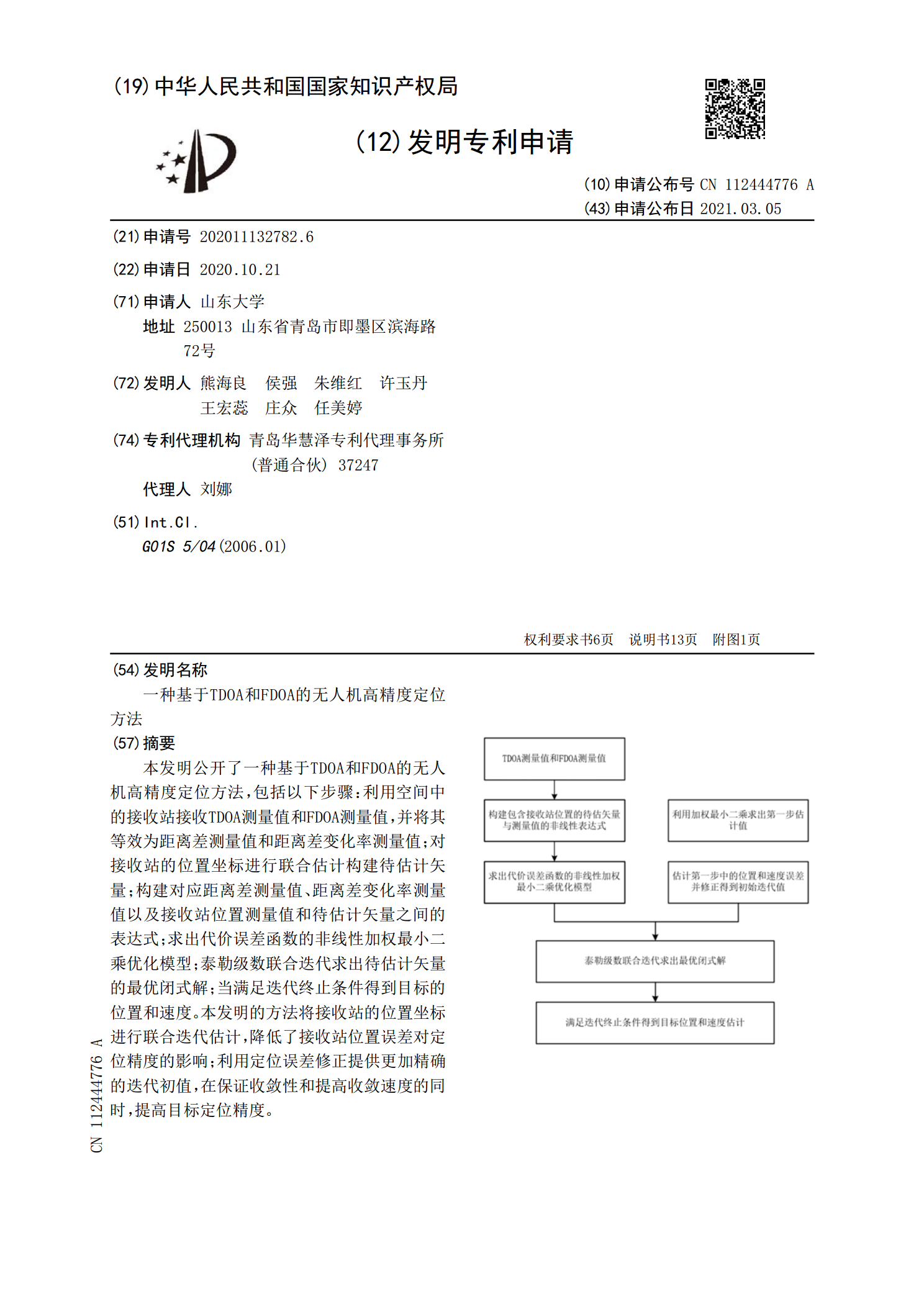
一种基于TDOA和FDOA的无人机高精度定位方法.pdf
本发明公开了一种基于TDOA和FDOA的无人机高精度定位方法,包括以下步骤:利用空间中的接收站接收TDOA测量值和FDOA测量值,并将其等效为距离差测量值和距离差变化率测量值;对接收站的位置坐标进行联合估计构建待估计矢量;构建对应距离差测量值、距离差变化率测量值以及接收站位置测量值和待估计矢量之间的表达式;求出代价误差函数的非线性加权最小二乘优化模型;泰勒级数联合迭代求出待估计矢量的最优闭式解;当满足迭代终止条件得到目标的位置和速度。本发明的方法将接收站的位置坐标进行联合迭代估计,降低了接收站位置误差对定
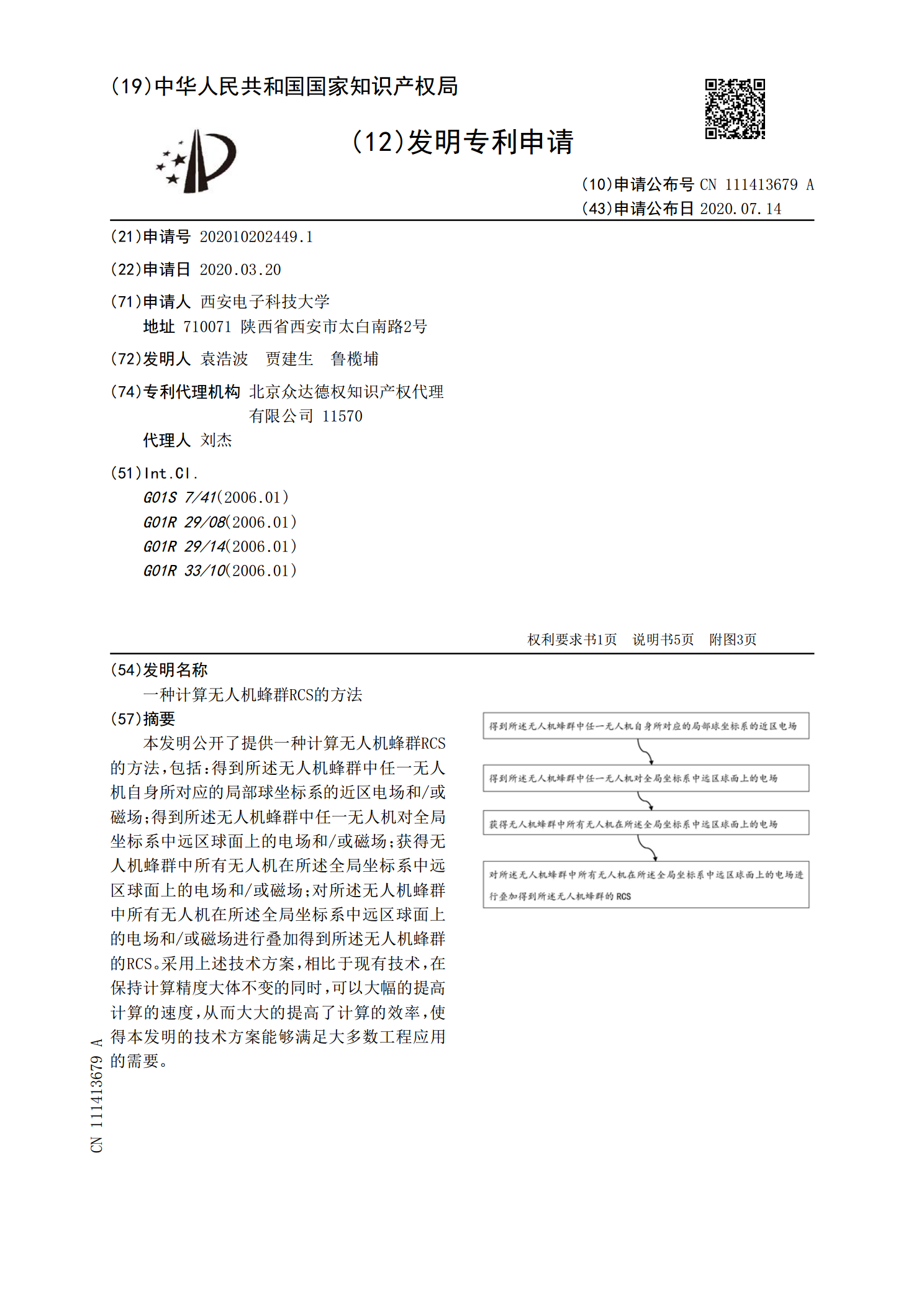
一种计算无人机蜂群RCS的方法.pdf
本发明公开了提供一种计算无人机蜂群RCS的方法,包括:得到所述无人机蜂群中任一无人机自身所对应的局部球坐标系的近区电场和/或磁场;得到所述无人机蜂群中任一无人机对全局坐标系中远区球面上的电场和/或磁场;获得无人机蜂群中所有无人机在所述全局坐标系中远区球面上的电场和/或磁场;对所述无人机蜂群中所有无人机在所述全局坐标系中远区球面上的电场和/或磁场进行叠加得到所述无人机蜂群的RCS。采用上述技术方案,相比于现有技术,在保持计算精度大体不变的同时,可以大幅的提高计算的速度,从而大大的提高了计算的效率,使得本发明