
基于蜂群算法的飞机舵机电动伺服系统摩擦补偿方法.pdf

春景****23


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于蜂群算法的飞机舵机电动伺服系统摩擦补偿方法.pdf
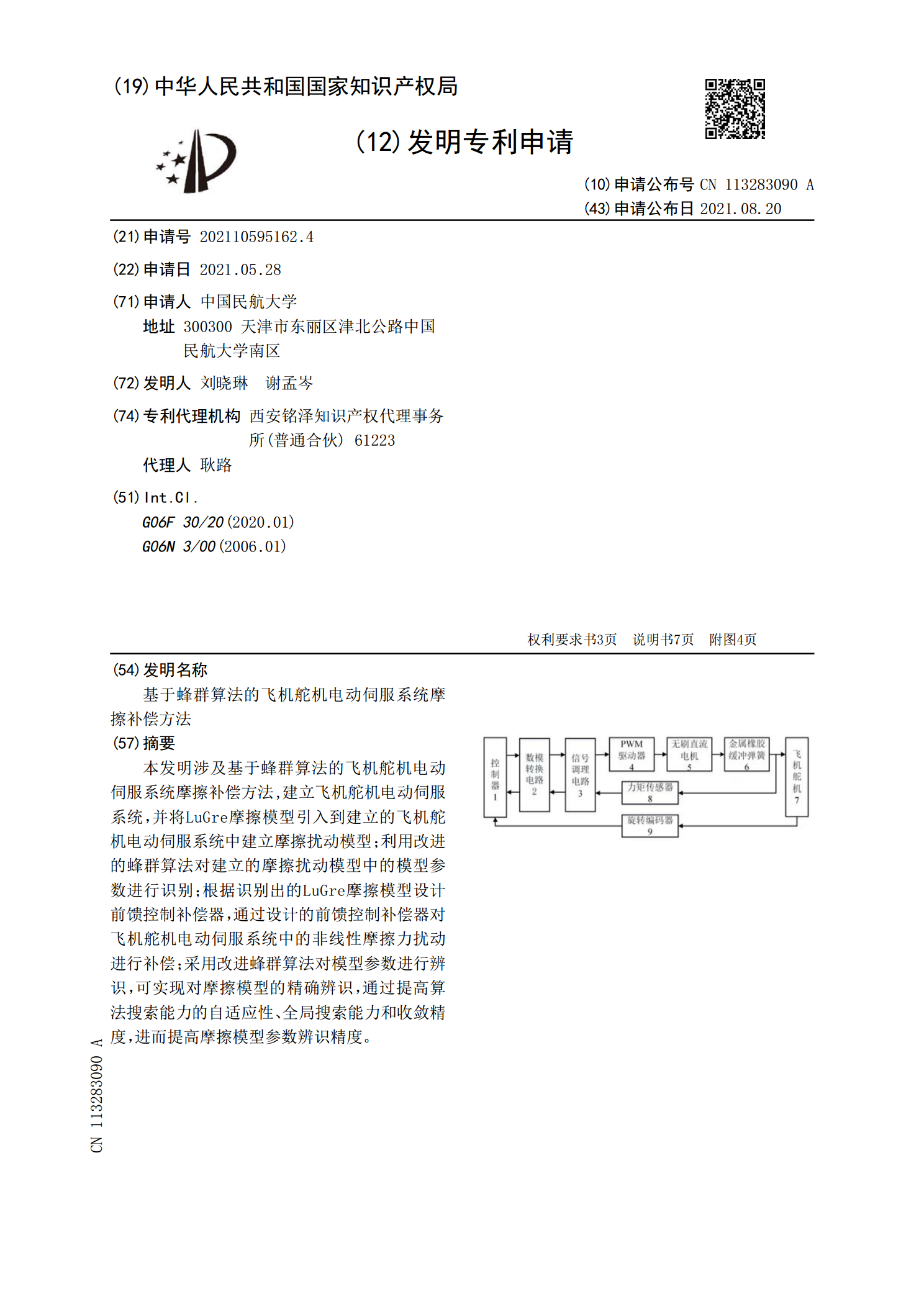
本发明涉及基于蜂群算法的飞机舵机电动伺服系统摩擦补偿方法,建立飞机舵机电动伺服系统,并将LuGre摩擦模型引入到建立的飞机舵机电动伺服系统中建立摩擦扰动模型;利用改进的蜂群算法对建立的摩擦扰动模型中的模型参数进行识别;根据识别出的LuGre摩擦模型设计前馈控制补偿器,通过设计的前馈控制补偿器对飞机舵机电动伺服系统中的非线性摩擦力扰动进行补偿;采用改进蜂群算法对模型参数进行辨识,可实现对摩擦模型的精确辨识,通过提高算法搜索能力的自适应性、全局搜索能力和收敛精度,进而提高摩擦模型参数辨识精度。

电动舵机伺服系统的间隙与摩擦补偿控制的开题报告.docx
电动舵机伺服系统的间隙与摩擦补偿控制的开题报告一、选题背景电动舵机作为伺服系统中的关键部件,广泛应用于航空、船舶、汽车及其它重要领域。在实际应用场景中,由于舵机结构的限制,其内部存在着一定的间隙和摩擦,如何准确地控制舵机的运动,精确地控制目标位置,一直是研究人员关注的问题。本文就电动舵机伺服系统的间隙与摩擦补偿控制这一问题进行深入研究,旨在寻找效果良好、适用范围广泛的方法及实践应用价值。二、研究目的本文的研究目的是:从理论上探究影响电动舵机伺服系统精度的因素及其机理。设计并实现一种精度高、适用范围广泛的电

基于复合控制的飞机舵机伺服系统动态仿真.docx
基于复合控制的飞机舵机伺服系统动态仿真摘要本文针对复合控制在飞机舵机伺服系统中的应用进行了动态仿真。首先,介绍了飞机舵机伺服系统的基本结构和控制原理。然后,利用Simulink软件建立了包括PID控制、模糊控制和神经网络控制的复合控制系统。最后,通过对比不同控制算法的仿真结果,验证了复合控制的有效性和优越性。关键词:复合控制;飞机舵机伺服系统;动态仿真AbstractThispaperfocusesonthedynamicsimulationofcompositecontrolintheaircrafts

基于遗传算法的直流伺服系统参数辨识及摩擦补偿控制.docx
基于遗传算法的直流伺服系统参数辨识及摩擦补偿控制基于遗传算法的直流伺服系统参数辨识及摩擦补偿控制摘要:本文通过遗传算法与直流伺服系统相结合,实现对直流伺服系统参数进行辨识,并进行摩擦补偿控制,提高伺服系统的精度和稳定性。在实验中,利用MATLAB/Simulink进行模拟,对伺服系统的性能进行测试,取得了较好的效果。关键词:遗传算法;直流伺服系统;参数辨识;摩擦补偿控制;MATLAB/SimulinkIntroduction直流伺服系统是一种重要的运动控制系统,广泛应用于机器人控制、工业自动化等领域。然而

飞机舵机电液伺服系统智能控制方法.pdf
一种飞机舵机电液伺服系统智能控制方法。其包括由改进人工蜂群算法模块和PID控制器模块组成控制器;利用改进人工蜂群算法模块实时获取力传感器和位移传感器输出的系统误差信息,计算适应度,寻找最优食物源作为PID控制器参数输出;PID控制器模块利用力和位移传感器输出的系统误差信息以及改进人工蜂群算法模块输出的PID控制器参数,输出加载力指令信号给电液伺服阀,驱动阀控液压缸运动,产生加载力,经由缓冲弹簧和力传感器加载到飞机舵机上,飞机舵机根据该加载力指令信号进行相应运动等步骤。本发明控制方法有效提高了飞机舵机电液伺