
电动舵机伺服系统的间隙与摩擦补偿控制的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

电动舵机伺服系统的间隙与摩擦补偿控制的开题报告.docx
电动舵机伺服系统的间隙与摩擦补偿控制的开题报告一、选题背景电动舵机作为伺服系统中的关键部件,广泛应用于航空、船舶、汽车及其它重要领域。在实际应用场景中,由于舵机结构的限制,其内部存在着一定的间隙和摩擦,如何准确地控制舵机的运动,精确地控制目标位置,一直是研究人员关注的问题。本文就电动舵机伺服系统的间隙与摩擦补偿控制这一问题进行深入研究,旨在寻找效果良好、适用范围广泛的方法及实践应用价值。二、研究目的本文的研究目的是:从理论上探究影响电动舵机伺服系统精度的因素及其机理。设计并实现一种精度高、适用范围广泛的电
基于蜂群算法的飞机舵机电动伺服系统摩擦补偿方法.pdf
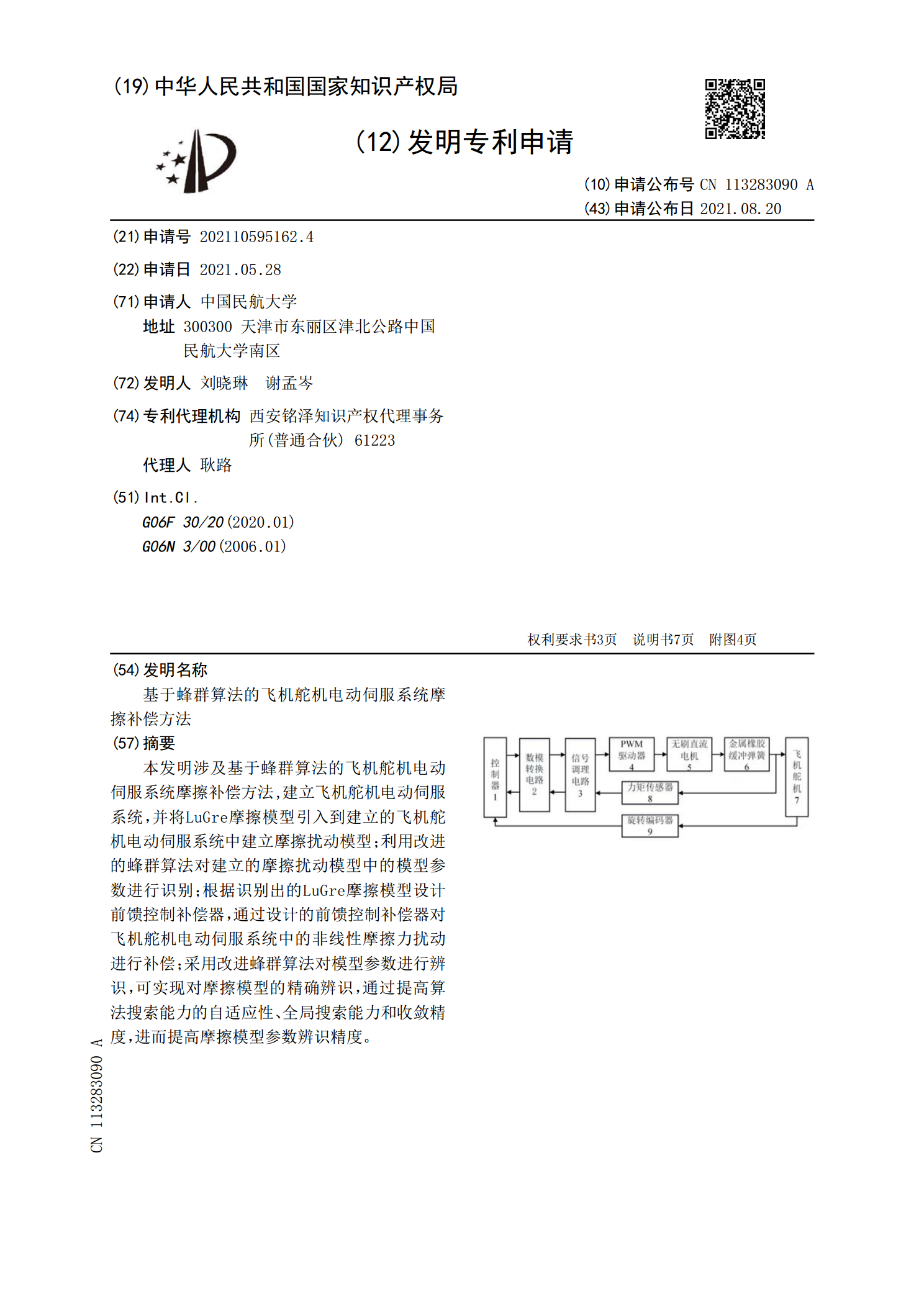
本发明涉及基于蜂群算法的飞机舵机电动伺服系统摩擦补偿方法,建立飞机舵机电动伺服系统,并将LuGre摩擦模型引入到建立的飞机舵机电动伺服系统中建立摩擦扰动模型;利用改进的蜂群算法对建立的摩擦扰动模型中的模型参数进行识别;根据识别出的LuGre摩擦模型设计前馈控制补偿器,通过设计的前馈控制补偿器对飞机舵机电动伺服系统中的非线性摩擦力扰动进行补偿;采用改进蜂群算法对模型参数进行辨识,可实现对摩擦模型的精确辨识,通过提高算法搜索能力的自适应性、全局搜索能力和收敛精度,进而提高摩擦模型参数辨识精度。

一种电动舵机伺服系统的间隙调节装置.pdf
本发明提供了一种电动舵机伺服系统的间隙调节装置。主要包括:旋转螺杆、输入滑块组件和输出滑块组件。旋转螺杆与输入滑块组件相连,输入滑块组件与输出滑块组件相连。调节过程包括:旋动旋转螺杆,带动输入滑块组件发生位移,进而带动输出滑块组件产生相应的位移,调节负载齿条与减速器输出齿轮之间的间隙。本发明的装置可以调节电动舵机伺服系统中输出齿轮与负载齿条之间的间隙,为电动舵机伺服系统提供连续变化、不同特性的间隙干扰,用于电动舵机伺服系统的间隙特性分析和补偿控制算法研究。

发射装置伺服系统的摩擦补偿及高精度控制策略研究的开题报告.docx
发射装置伺服系统的摩擦补偿及高精度控制策略研究的开题报告一、研究背景发射装置是一种关键的设备,被广泛用于航天、武器、火箭等领域。在发射过程中,需要精确控制发射装置的角度和速度等参数,以确保发射过程的稳定性和准确性。然而,发射装置的伺服系统在工作过程中会受到许多因素的干扰,如摩擦力、振动、外部扰动等,这些因素会影响伺服系统的精确控制,从而降低发射的质量和效率。为了解决这一问题,需要对发射装置伺服系统进行摩擦补偿和高精度控制的研究。摩擦补偿技术能够有效降低伺服系统的摩擦力,提高系统的可控性和精确度。高精度控制

含摩擦环节伺服系统的补偿控制的中期报告.docx
含摩擦环节伺服系统的补偿控制的中期报告一、项目背景与目的随着工业自动化水平的不断提高,伺服系统得到了广泛应用。在伺服系统中,摩擦环节是一个不可避免的存在,摩擦环节对系统的运动控制产生了不小的影响。因此,如何补偿摩擦环节对系统的干扰,提高伺服系统的运动控制精度和稳定性,是当前伺服系统研究的热点之一。本项目旨在研究含摩擦环节的伺服系统的补偿控制方法,通过对系统建模和控制算法的设计,实现对系统的预测控制和补偿控制,提高伺服系统的运动控制精度和稳定性,同时降低系统的能耗和成本。二、项目进展情况1.系统建模与参数辨