
飞机舵机电液伺服系统智能控制方法.pdf

俊凤****bb

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

飞机舵机电液伺服系统智能控制方法.pdf
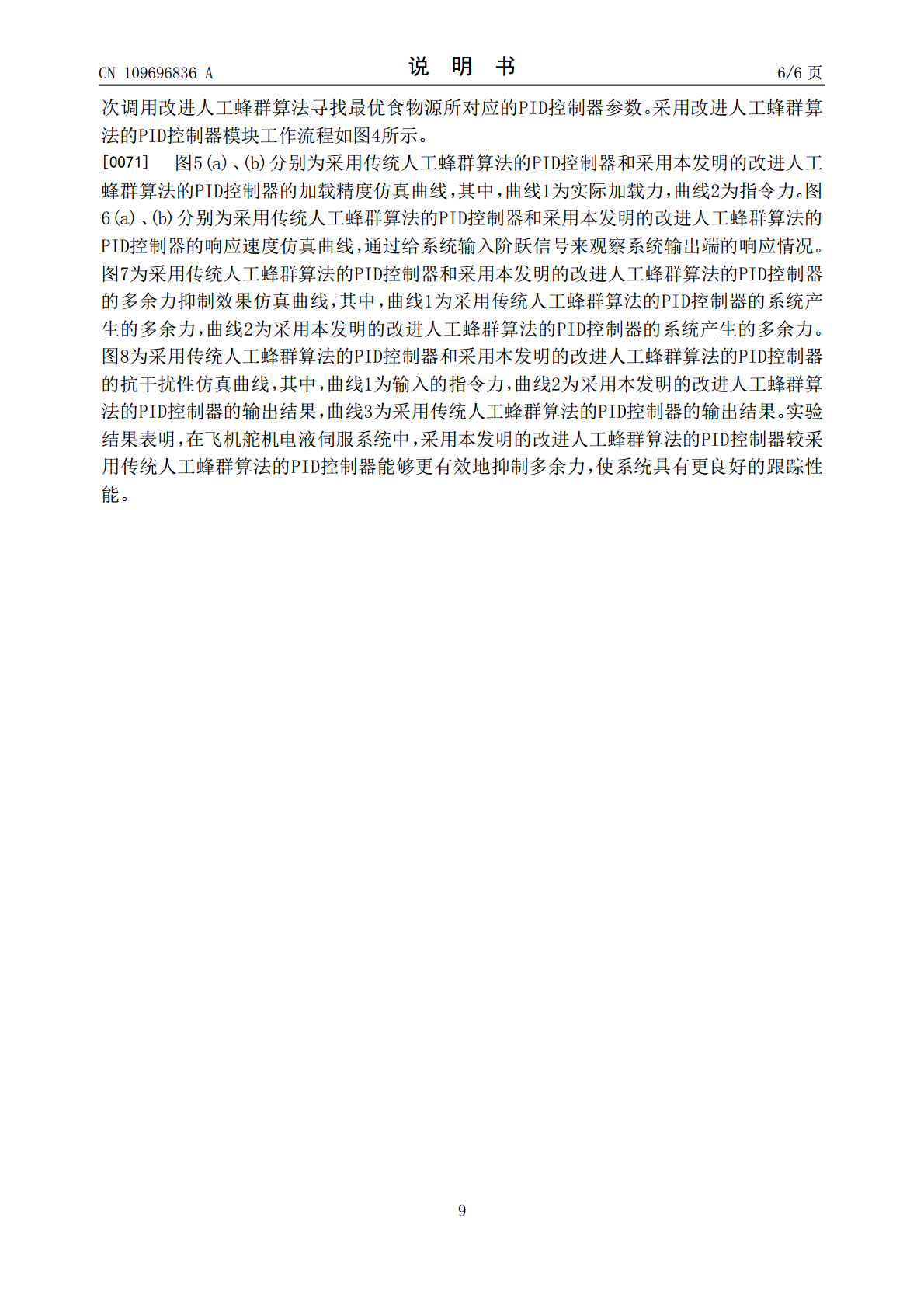
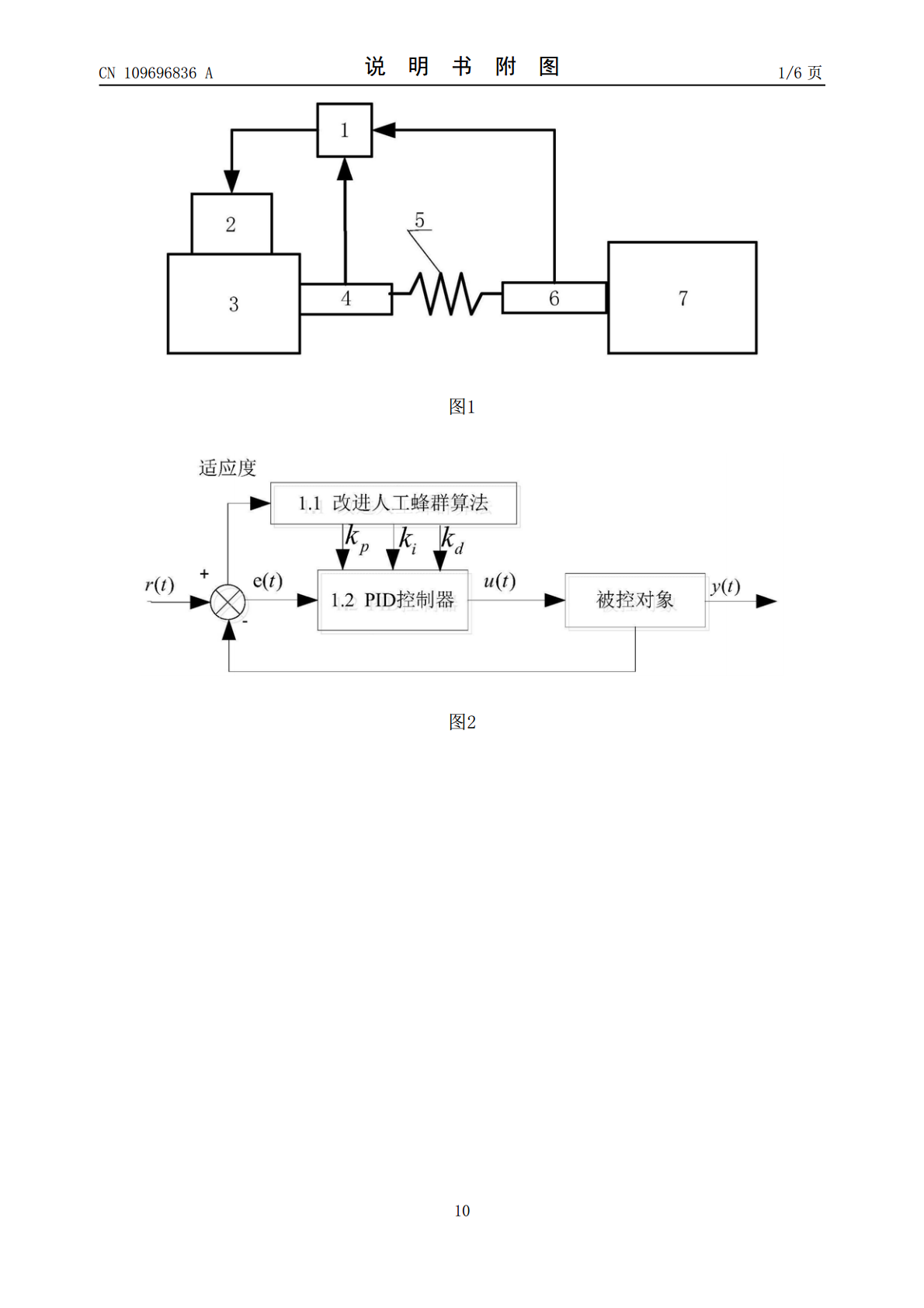
一种飞机舵机电液伺服系统智能控制方法。其包括由改进人工蜂群算法模块和PID控制器模块组成控制器;利用改进人工蜂群算法模块实时获取力传感器和位移传感器输出的系统误差信息,计算适应度,寻找最优食物源作为PID控制器参数输出;PID控制器模块利用力和位移传感器输出的系统误差信息以及改进人工蜂群算法模块输出的PID控制器参数,输出加载力指令信号给电液伺服阀,驱动阀控液压缸运动,产生加载力,经由缓冲弹簧和力传感器加载到飞机舵机上,飞机舵机根据该加载力指令信号进行相应运动等步骤。本发明控制方法有效提高了飞机舵机电液伺

电液伺服系统的智能控制及其仿真研究.docx
电液伺服系统的智能控制及其仿真研究电液伺服系统是现代工业中常见的控制系统之一,它具有高精度、高响应速度等优点,在工业自动化中得到广泛应用。然而,在电液伺服系统的实际应用过程中,经常会遇到一些问题,如控制精度不高、响应速度较慢、控制系统复杂等,这些问题需要进行深入的研究。智能控制技术是目前控制领域中的热门研究方向之一,它具有适应性、可靠性、灵活性等优点,可以有效地提高电液伺服系统的控制精度和响应速度,降低系统的控制复杂度。本文将对电液伺服系统的智能控制及其仿真研究进行讨论。一、电液伺服系统的基本原理电液伺服

智能PID控制实际应用—电液伺服系统.doc
专家PID控制器在电液伺服系统中的应用在工业过程控制中,目前采用最多的控制方式依然PID方式。这一方面因为PID控制器具有简节而固定的形式,在很宽的条件范围内都能保持较好的鲁棒性;另一方面因为PID控制器允许工程技术人员以一种简单而直接的方式来调节系统。然而,在一些要求高精度、高性能但有常常具有非线性性质、时变性质、难以建立精确数学模型的控制系统中,传统PID往往表现出局限性。在人工智能高速发展的今天,智能PID成为弥补传统PID控制算法的一种有效手段,且已经运用到多方面工业控制中并表现良好。1专家PID

飞机舵机电液负载模拟器控制方法研究.docx
飞机舵机电液负载模拟器控制方法研究飞机的飞行控制系统是确保飞机安全飞行的关键部分之一。在飞机的飞行控制系统中,飞机舵机起到了至关重要的作用。飞机舵机负责调整飞机的舵面,通过控制舵面的运动来改变飞机的姿态、方向和稳定性。而为了对飞机舵机的控制进行有效的测试和验证,研究人员提出了一种飞机舵机电液负载模拟器控制方法。本论文主要围绕飞机舵机电液负载模拟器控制方法展开研究,旨在探讨如何利用电液负载模拟器对飞机舵机进行有效的控制。首先,将介绍飞机舵机的基本原理和工作方式,然后详细介绍飞机舵机电液负载模拟器的工作原理和

一种智能舵系统及其控制方法.pdf
本发明公布了一种智能舵系统及其控制方法,所述系统包括可编程自动控制器、组合导航器、推进系统装置、操纵系统装置、应急操作装置。所述方法包括:利用安装在船体上的GPS导航仪和三维电子罗盘组合导航器检测到的船舶实际位置与航向;可编程自动控制器进行字符转换和提取,然后进行位置核算、航向处理、偏航角计算;计算船舶的偏航距d和偏航角ψ;判断船舶是否偏航;检测下一时刻船体的航行状态,返回到步骤(1),实现实时的闭环控制。本发明采用了二级齿轮进行降速传动从而提高了其舵角操作精度。采用主机控制器和继电器及时对推进系统和操纵