
基于线控转向系统的角传动比调节方法、装置及汽车.pdf

猫巷****志敏


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于线控转向系统的角传动比调节方法、装置及汽车.pdf
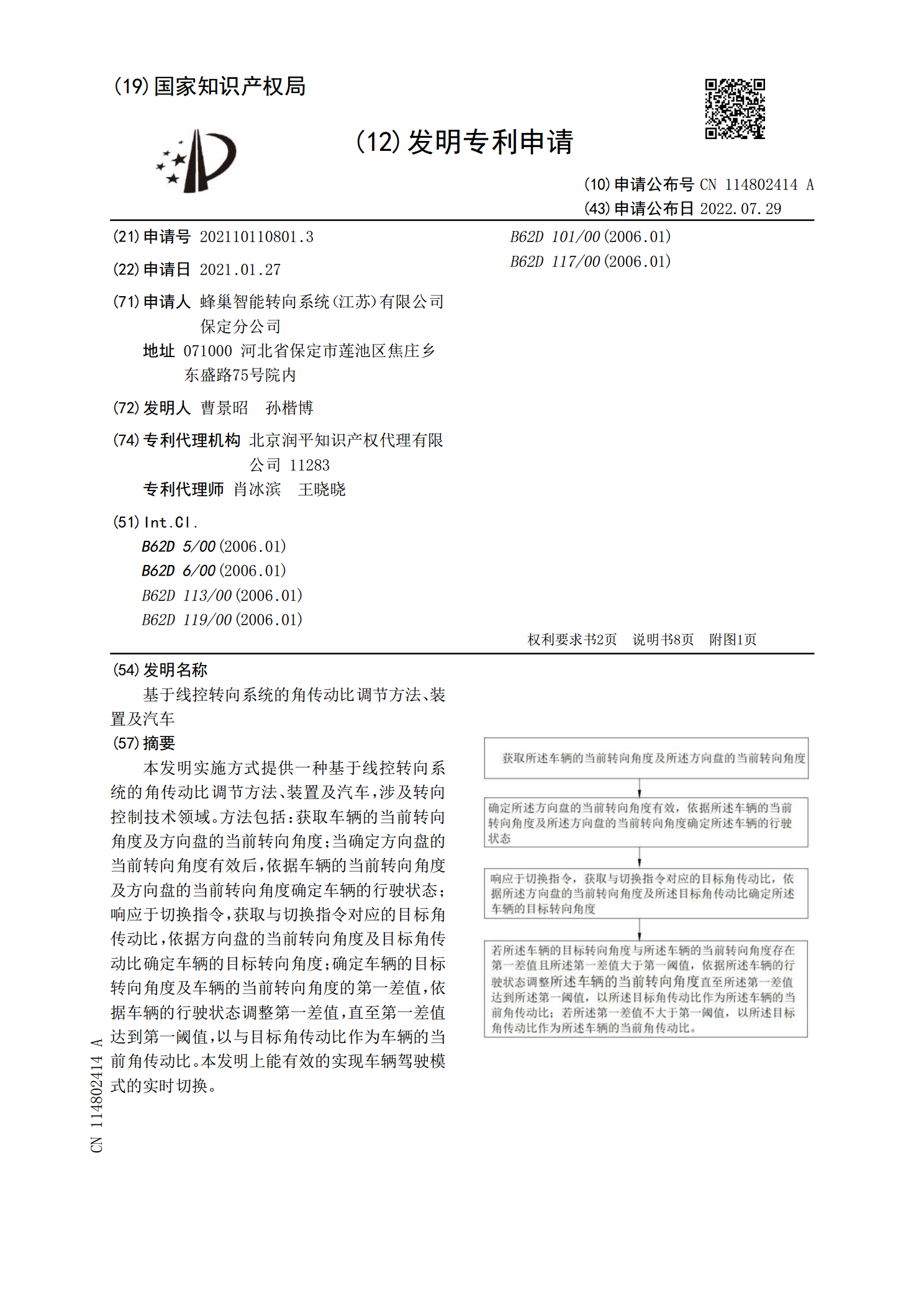
本发明实施方式提供一种基于线控转向系统的角传动比调节方法、装置及汽车,涉及转向控制技术领域。方法包括:获取车辆的当前转向角度及方向盘的当前转向角度;当确定方向盘的当前转向角度有效后,依据车辆的当前转向角度及方向盘的当前转向角度确定车辆的行驶状态;响应于切换指令,获取与切换指令对应的目标角传动比,依据方向盘的当前转向角度及目标角传动比确定车辆的目标转向角度;确定车辆的目标转向角度及车辆的当前转向角度的第一差值,依据车辆的行驶状态调整第一差值,直至第一差值达到第一阈值,以与目标角传动比作为车辆的当前角传动比。

基于Matlab-CANoe的汽车变传动比线控转向系统联合仿真.docx
基于Matlab-CANoe的汽车变传动比线控转向系统联合仿真汽车变传动比线控转向系统联合仿真摘要:随着汽车工业的进一步发展和技术的不断进步,汽车电子化技术日益成熟,汽车变速器和转向系统的控制变得越来越普及。本文基于Matlab-CANoe平台,针对汽车变传动比线控转向系统的联合仿真进行了研究。首先,概述了汽车变传动比线控转向系统的工作原理和组成部分,并建立了系统的数学模型。然后,在Matlab/Simulink中对汽车变速器进行了建模和仿真,并将仿真结果作为输入信号输入到CANoe中进行仿真。最后,通过

基于CarSim的线控转向汽车理想传动比的设计研究.docx
基于CarSim的线控转向汽车理想传动比的设计研究基于CarSim的线控转向汽车理想传动比的设计研究摘要:汽车转向系统是汽车行驶的关键部件之一,传动比的选择是影响车辆操控性能与舒适性的重要因素之一。本研究基于CarSim仿真平台,通过调整汽车转向系统的传动比来优化车辆的操控性能和舒适性,在转向系统的传动比选择方面进行研究与探索。关键词:CarSim;转向系统;传动比;操控性能;舒适性1.引言汽车转向系统是实现车辆转向控制的重要装置,其性能直接影响到车辆的操控性能和舒适性。而传动比作为转向机构的关键参数之一

基于变角传动比的汽车线控主动转向控制策略研究的开题报告.docx
基于变角传动比的汽车线控主动转向控制策略研究的开题报告一、选题背景汽车的线控主动转向控制是智能汽车技术发展的重要方面之一,其在行车过程中通过对车轮角度的调整帮助驾驶员更好地控制车辆,提高行车安全性、舒适性及驾驶员的驾驶体验等方面具有重要的意义。然而现有的主动转向控制策略多基于车速、方向盘转角等静态变量,未涉及到车轮角度的动态变化。因此,基于变角传动比的控制策略的研究将为实现更高效、更智能的车辆控制提供重要的基础。二、选题目的和意义本课题的目的是基于变角传动比的汽车线控主动转向控制策略研究,通过对车轮角度的
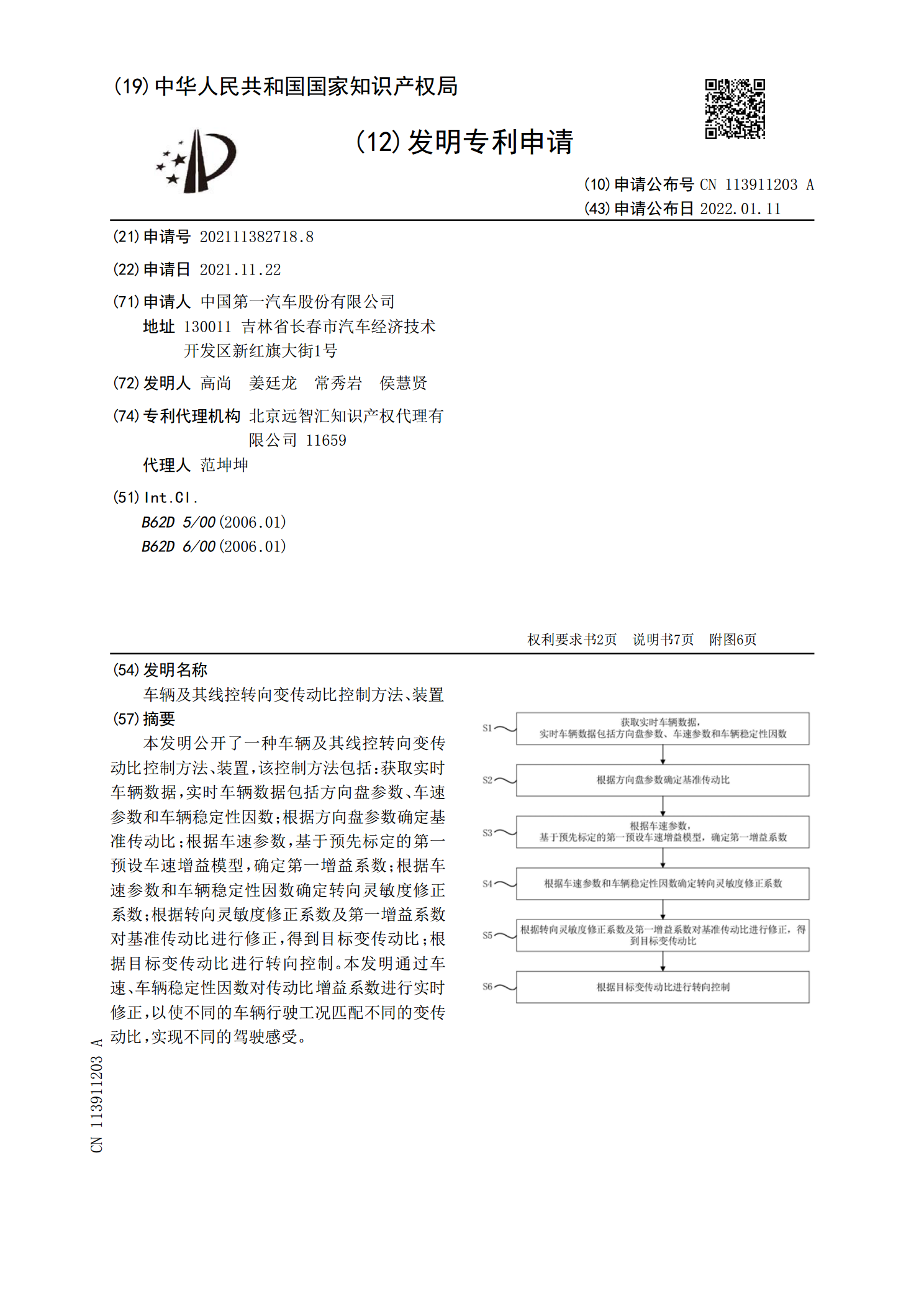
车辆及其线控转向变传动比控制方法、装置.pdf
本发明公开了一种车辆及其线控转向变传动比控制方法、装置,该控制方法包括:获取实时车辆数据,实时车辆数据包括方向盘参数、车速参数和车辆稳定性因数;根据方向盘参数确定基准传动比;根据车速参数,基于预先标定的第一预设车速增益模型,确定第一增益系数;根据车速参数和车辆稳定性因数确定转向灵敏度修正系数;根据转向灵敏度修正系数及第一增益系数对基准传动比进行修正,得到目标变传动比;根据目标变传动比进行转向控制。本发明通过车速、车辆稳定性因数对传动比增益系数进行实时修正,以使不同的车辆行驶工况匹配不同的变传动比,实现不同