
一种基于多无人机安全通信的协同控制策略.pdf

佳晨****ng


1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多无人机安全通信的协同控制策略.pdf
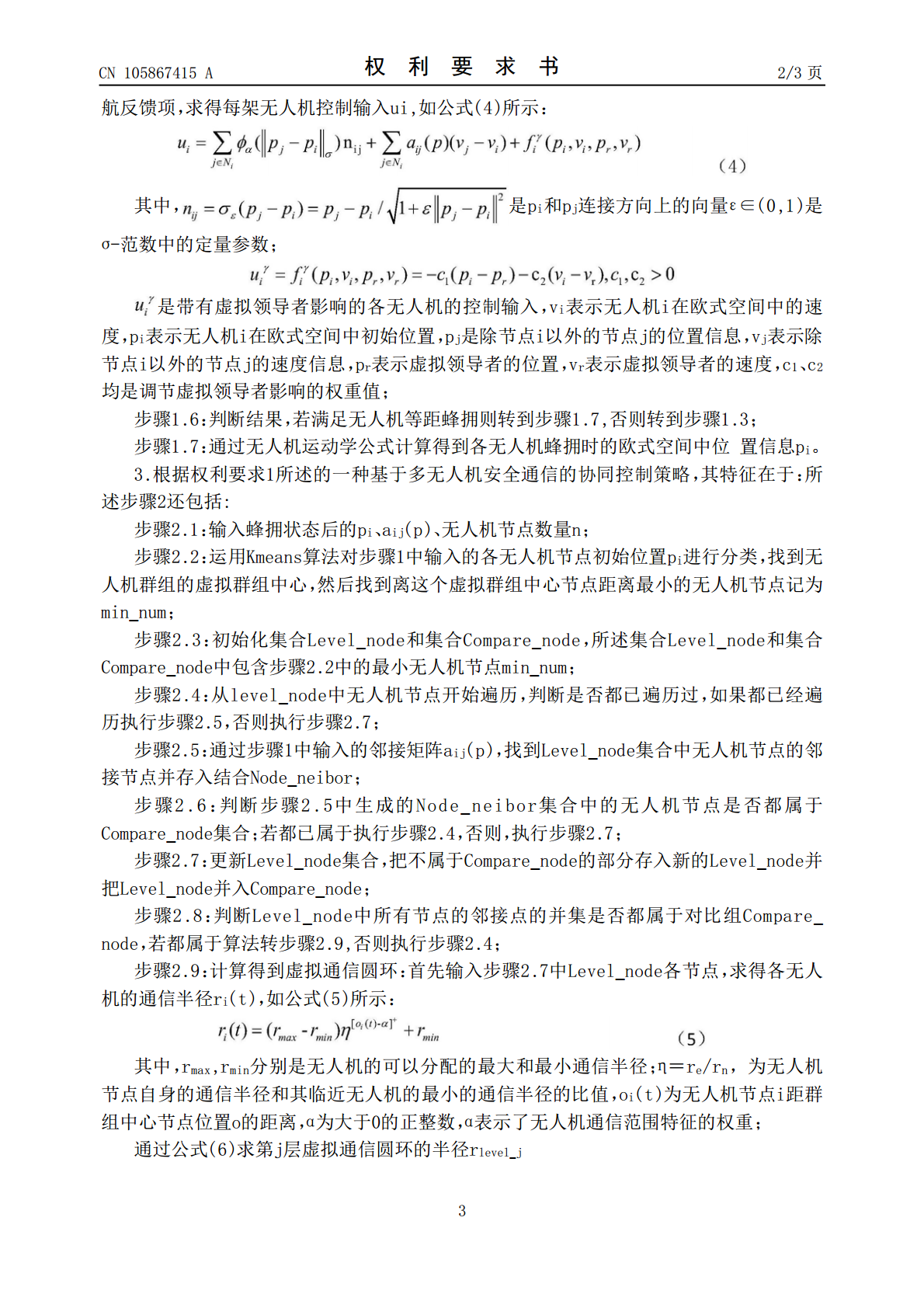
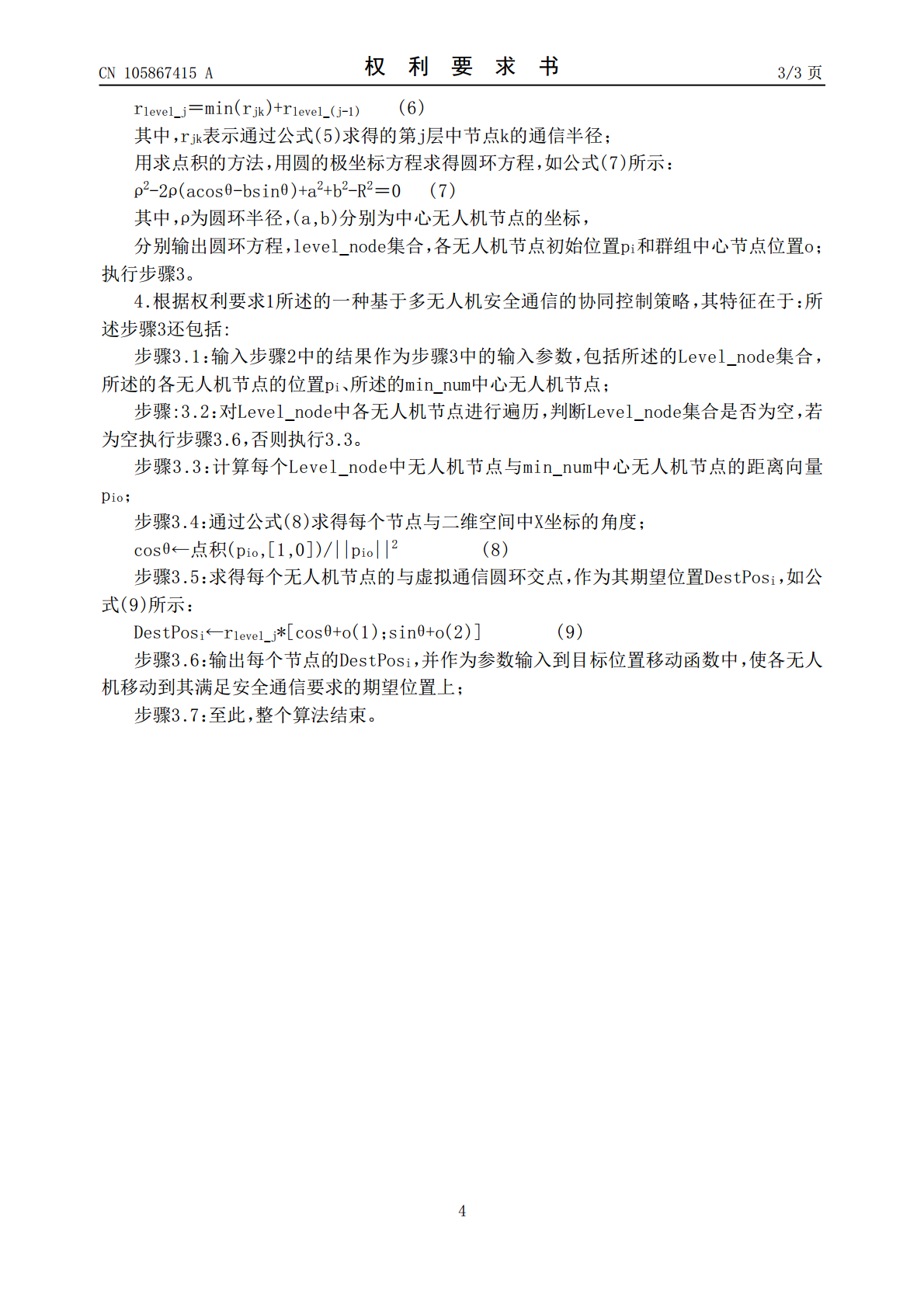
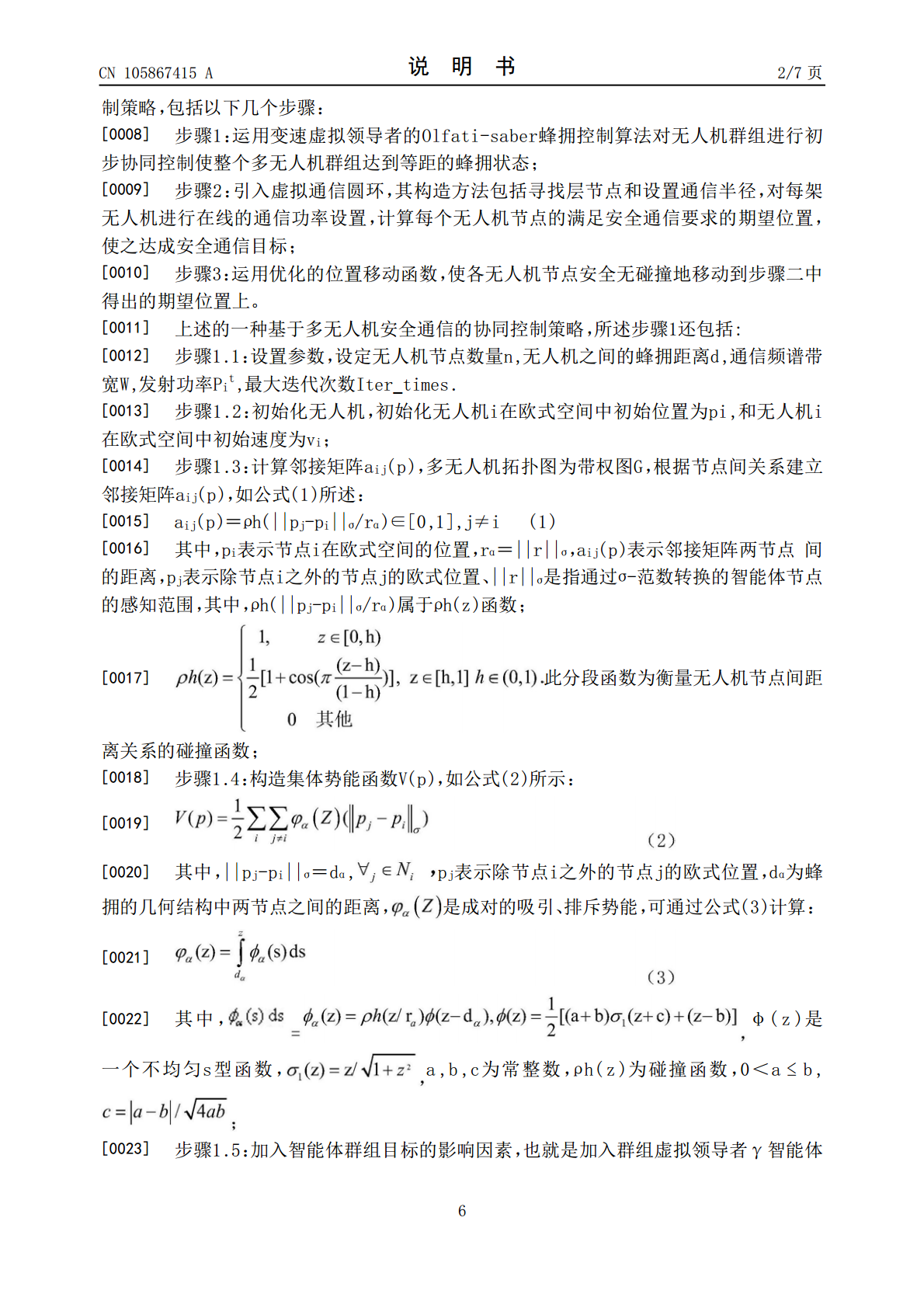
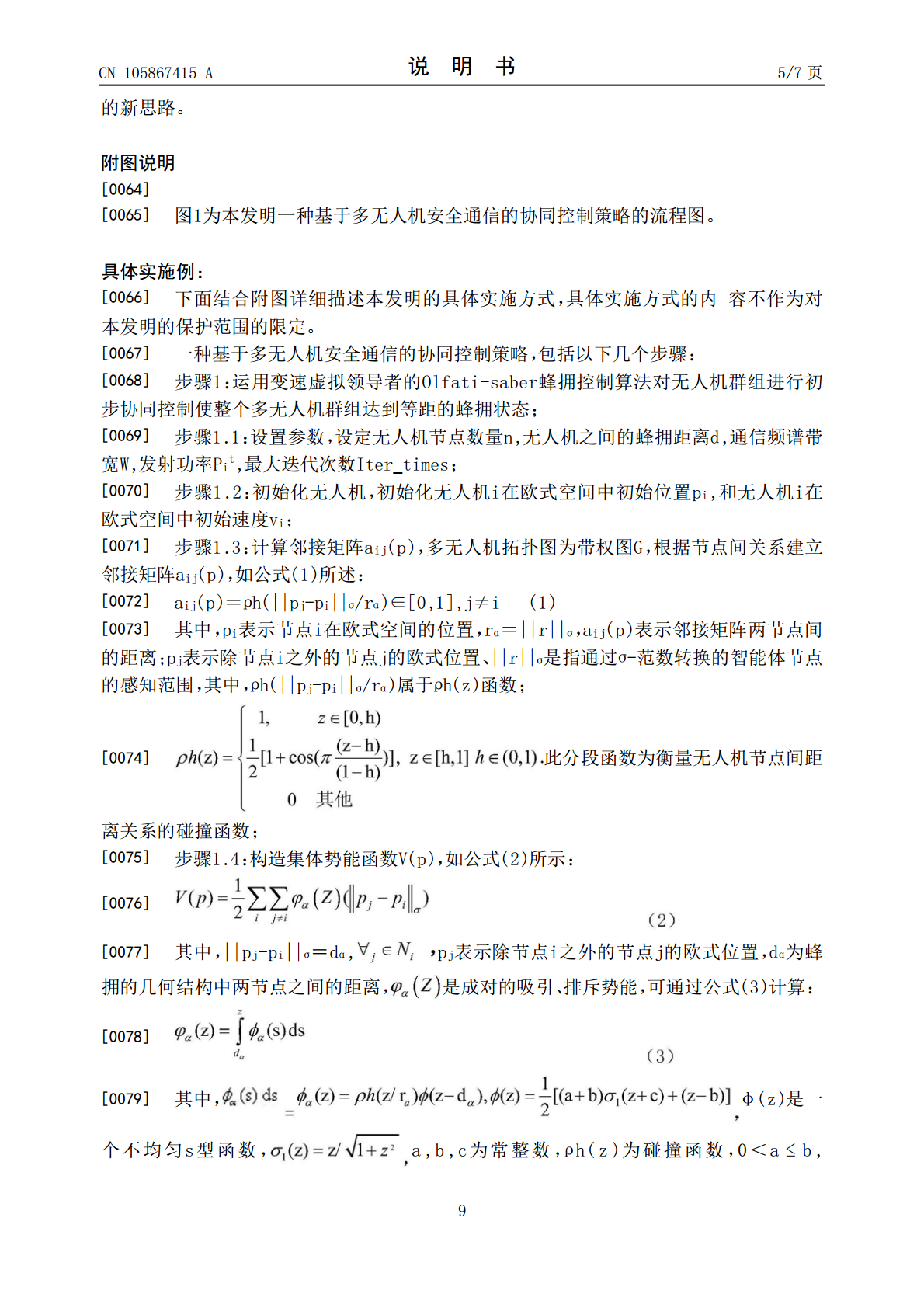
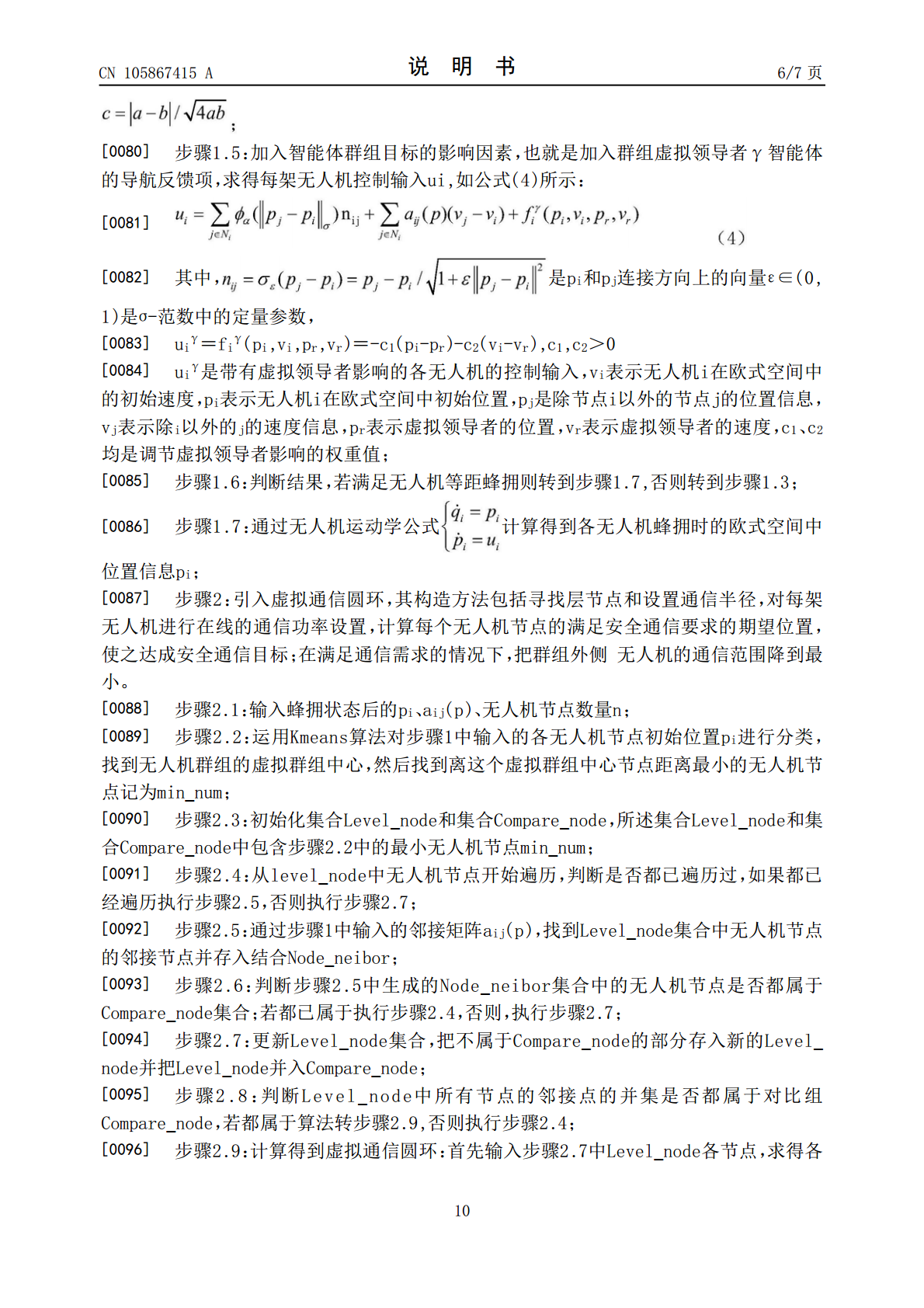
本发明公开了一种基于多无人机安全通信的协同控制策略,步骤1:运用变速虚拟领导者的Olfati‑saber蜂拥控制算法对无人机群组进行初步协同控制;步骤2:引入虚拟通信圆环,对每架无人机进行在线的通信功率设置,计算每个无人机节点的满足安全通信要求的期望位置;步骤3:运用优化的位置移动函数,使各无人机节点安全无碰撞地移动到步骤二中得出的期望位置上;本发明更多的研究通信是如何影响无人机群组动力学和通信拓扑的,通过新提出的虚拟通信圆环,改进的目标移动函数与已有的经典动力学蜂拥算法的结合,有效的解决了多无人机系统可
一种增加通信链路的多无人机的协同控制策略.pdf
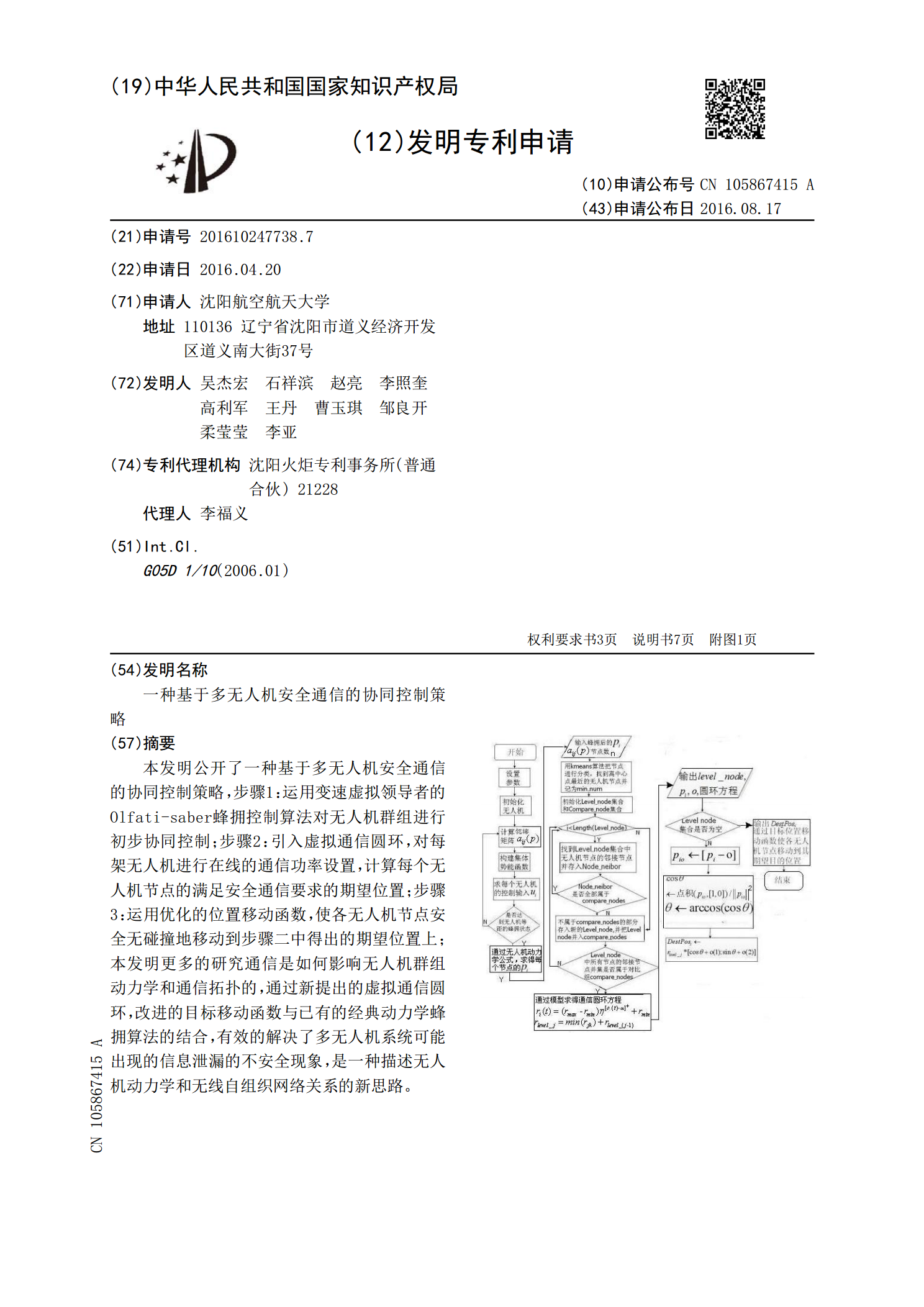
一种增加通信链路的多无人机的协同控制策略,包括步骤:在多无人机的飞行过程中,将无人机群组的速度进行分段控制,引入飞行控制因子的概念,提出了群聚算法;使多无人机在群聚的过程中,不同阶段有不同的收敛速度,从而增加无人机群组在飞行过程中的通信链路数目,使群组能够更加快速、稳定的达到蜂拥状态。本发明通过改变无人机在不同阶段的飞行速度,从而增加无人机在飞行过程中的通信链路,具有操控简单,无人机群组收敛速度快、平滑及稳定等特点,能够使多无人机群组形成蜂拥状态。在战场环境中多无人机协同作战具有广泛的应用前景。
一种基于图论的多无人机协同控制方法.pdf
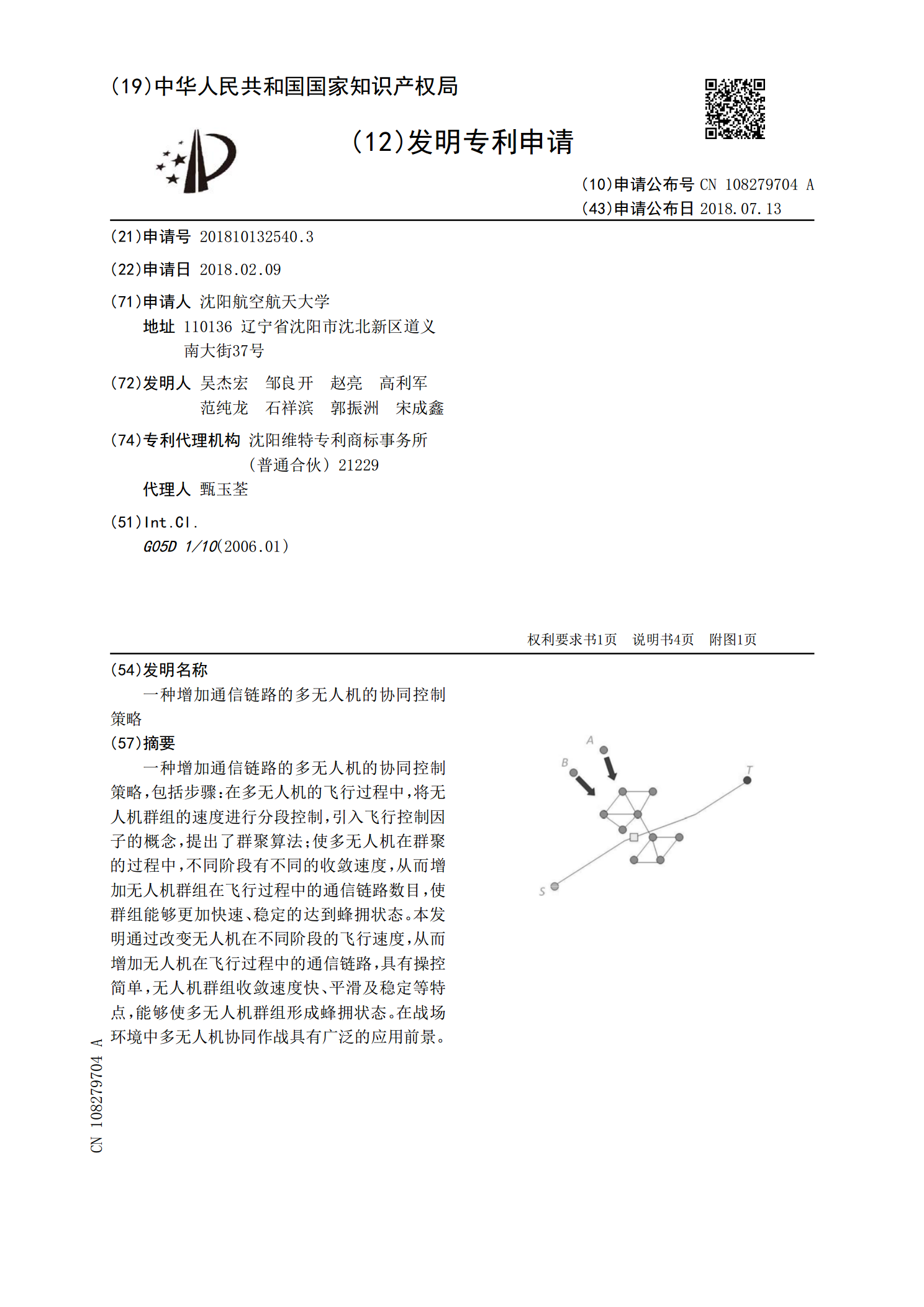
本发明公开了一种基于图论的多无人机协同控制方法,包括以下步骤:步骤S1,通过多无人机各个无人机之间的通讯关系确定多无人机的通讯网络图;步骤S2,通过通讯网络图生成多无人机控制关系树;步骤S3,通过步骤S2生成的控制关系树,确定每个无人机的相对运动控制的参考点;步骤S4,确定各个无人机之间的控制关系,实现多无人机协同控制。步骤S5,当参加协同任务的无人机出现异常后,控制关系树发生变化,产生有些无人机没有相对运动控制的参考点,这时通过重构控制关系树来重新生成实现协同控制。通过本发明的上述生成树算法可以自动快速

基于DE-MADDPG的多无人机协同追捕策略.docx
基于DE-MADDPG的多无人机协同追捕策略基于DE-MADDPG的多无人机协同追捕策略摘要:随着无人机技术的迅速发展,无人机的应用范围不断拓展,其中之一就是在追捕任务中的应用。本论文基于深度演化多智能体强化学习算法DE-MADDPG,提出了一种多无人机协同追捕策略,有望解决传统方法中协同追捕困难、效率低下的问题。通过实验验证,该策略在追捕效果和效率上优于传统方法。关键词:无人机,协同追捕,DE-MADDPG1.引言无人机的广泛应用已经改变了许多领域的工作方式和效率,其中包括安全领域中的追捕任务。多无人机
基于策略集合MADDPG多无人机协同攻防对抗方法.pdf
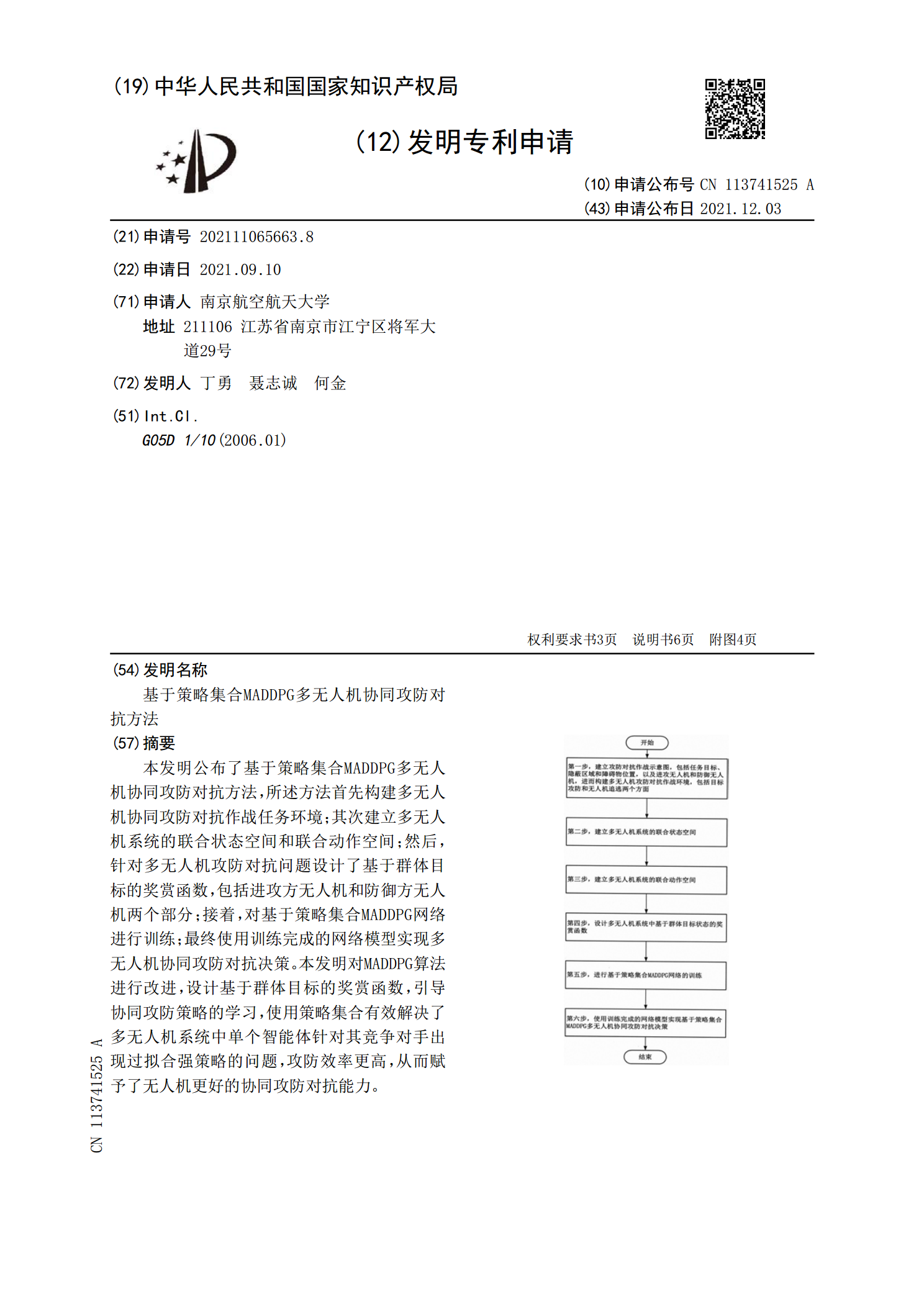
本发明公布了基于策略集合MADDPG多无人机协同攻防对抗方法,所述方法首先构建多无人机协同攻防对抗作战任务环境;其次建立多无人机系统的联合状态空间和联合动作空间;然后,针对多无人机攻防对抗问题设计了基于群体目标的奖赏函数,包括进攻方无人机和防御方无人机两个部分;接着,对基于策略集合MADDPG网络进行训练;最终使用训练完成的网络模型实现多无人机协同攻防对抗决策。本发明对MADDPG算法进行改进,设计基于群体目标的奖赏函数,引导协同攻防策略的学习,使用策略集合有效解决了多无人机系统中单个智能体针对其竞争对手