
车辆控制方法、装置、车辆、电子设备及可读存储介质.pdf

莉娜****ua


1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆控制方法、装置、车辆、电子设备及可读存储介质.pdf
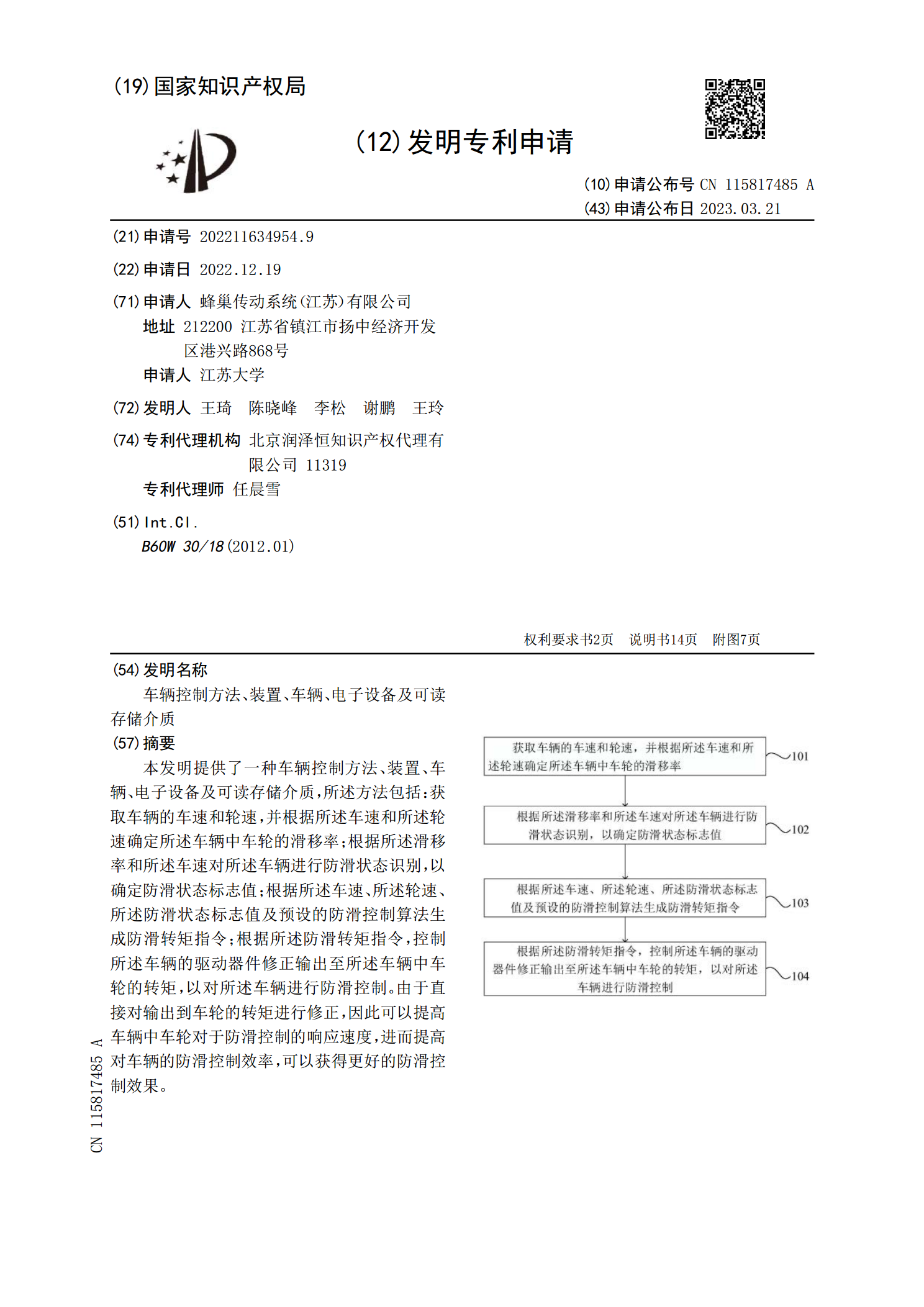
本发明提供了一种车辆控制方法、装置、车辆、电子设备及可读存储介质,所述方法包括:获取车辆的车速和轮速,并根据所述车速和所述轮速确定所述车辆中车轮的滑移率;根据所述滑移率和所述车速对所述车辆进行防滑状态识别,以确定防滑状态标志值;根据所述车速、所述轮速、所述防滑状态标志值及预设的防滑控制算法生成防滑转矩指令;根据所述防滑转矩指令,控制所述车辆的驱动器件修正输出至所述车辆中车轮的转矩,以对所述车辆进行防滑控制。由于直接对输出到车轮的转矩进行修正,因此可以提高车辆中车轮对于防滑控制的响应速度,进而提高对车辆的防
车辆巡航控制方法、装置、车辆及可读存储介质.pdf
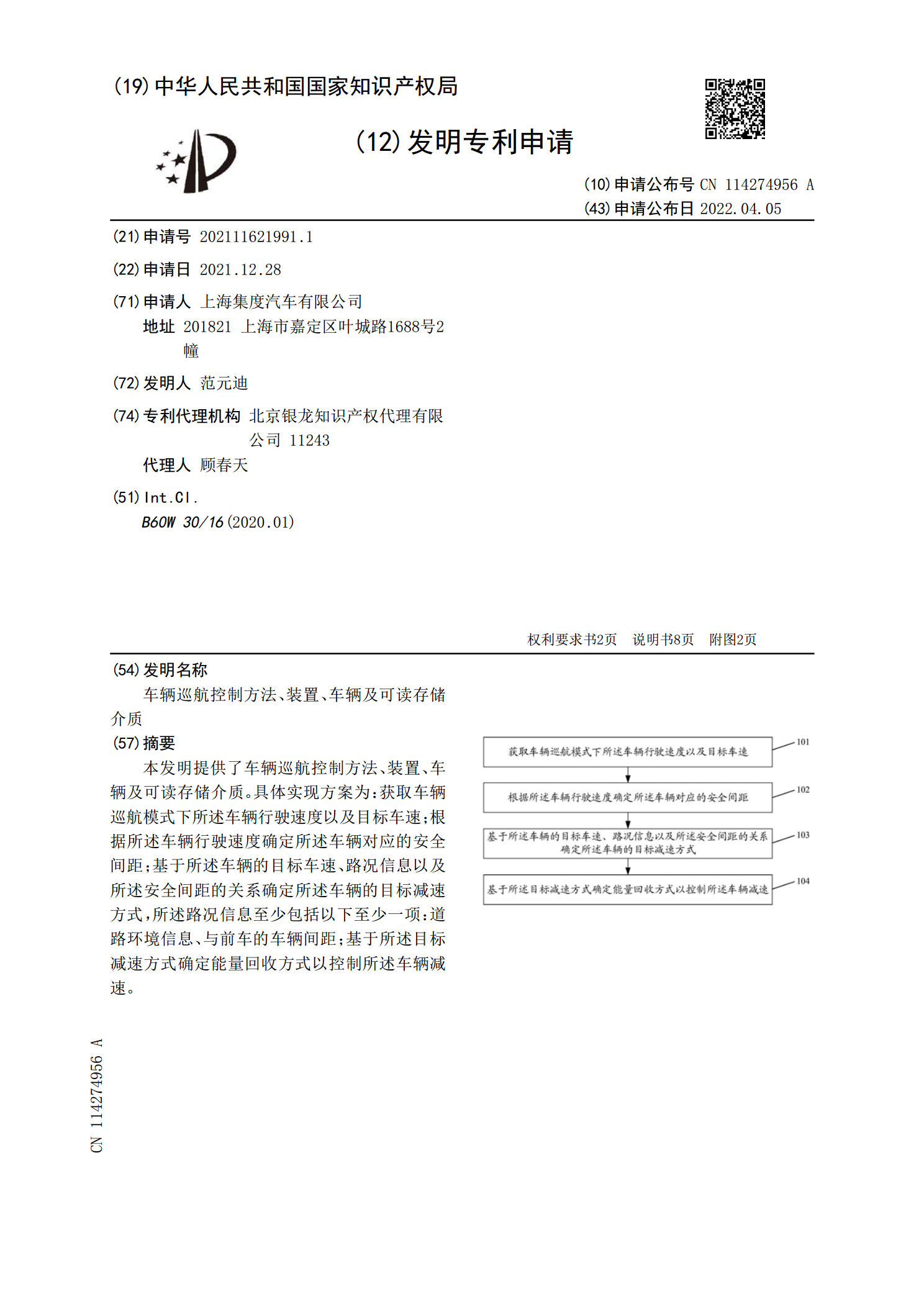
本发明提供了车辆巡航控制方法、装置、车辆及可读存储介质。具体实现方案为:获取车辆巡航模式下所述车辆行驶速度以及目标车速;根据所述车辆行驶速度确定所述车辆对应的安全间距;基于所述车辆的目标车速、路况信息以及所述安全间距的关系确定所述车辆的目标减速方式,所述路况信息至少包括以下至少一项:道路环境信息、与前车的车辆间距;基于所述目标减速方式确定能量回收方式以控制所述车辆减速。

车辆检测方法、装置、电子设备及可读存储介质.pdf
本申请提供一种车辆检测方法、装置、电子设备及可读存储介质,该方法包括:检测加油站的指定区域是否存在车辆进入;当检测到目标车辆进入所述指定区域时,获取所述目标车辆的车辆属性信息;其中,所述车辆属性信息包括车牌信息;定时检测所述目标车辆是否停留在所述指定区域;当确定所述目标车辆离开所述指定区域时,确定所述目标车辆在所述指定区域的停留时间。该方法可以实现对车辆在加油站的指定区域的停留时间的实时检测,提高了加油站车辆停留时间的统计效率。
车辆制动方法、装置、电子设备及可读存储介质.pdf
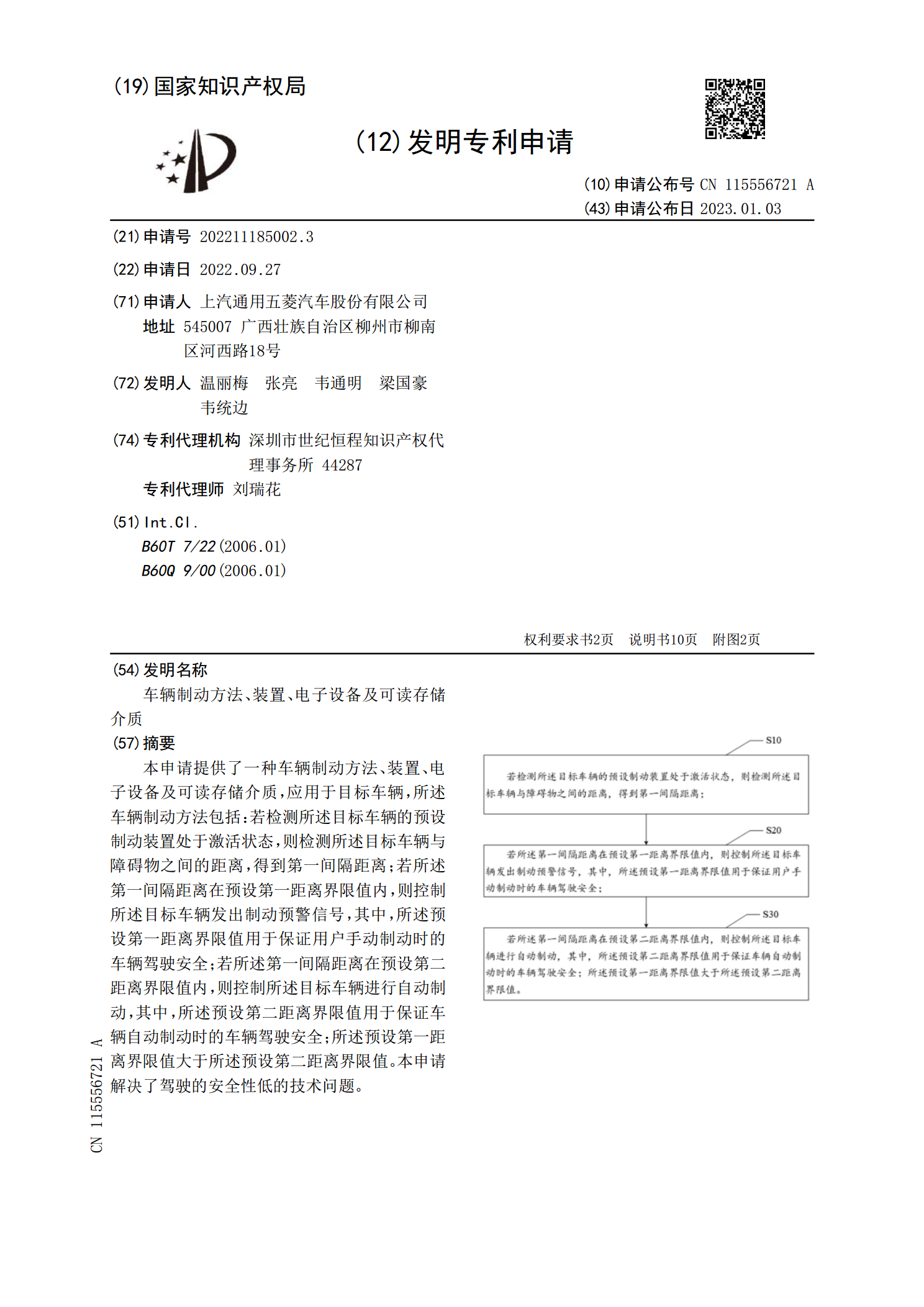
本申请提供了一种车辆制动方法、装置、电子设备及可读存储介质,应用于目标车辆,所述车辆制动方法包括:若检测所述目标车辆的预设制动装置处于激活状态,则检测所述目标车辆与障碍物之间的距离,得到第一间隔距离;若所述第一间隔距离在预设第一距离界限值内,则控制所述目标车辆发出制动预警信号,其中,所述预设第一距离界限值用于保证用户手动制动时的车辆驾驶安全;若所述第一间隔距离在预设第二距离界限值内,则控制所述目标车辆进行自动制动,其中,所述预设第二距离界限值用于保证车辆自动制动时的车辆驾驶安全;所述预设第一距离界限值大于
车辆调度方法、装置、电子设备及可读存储介质.pdf
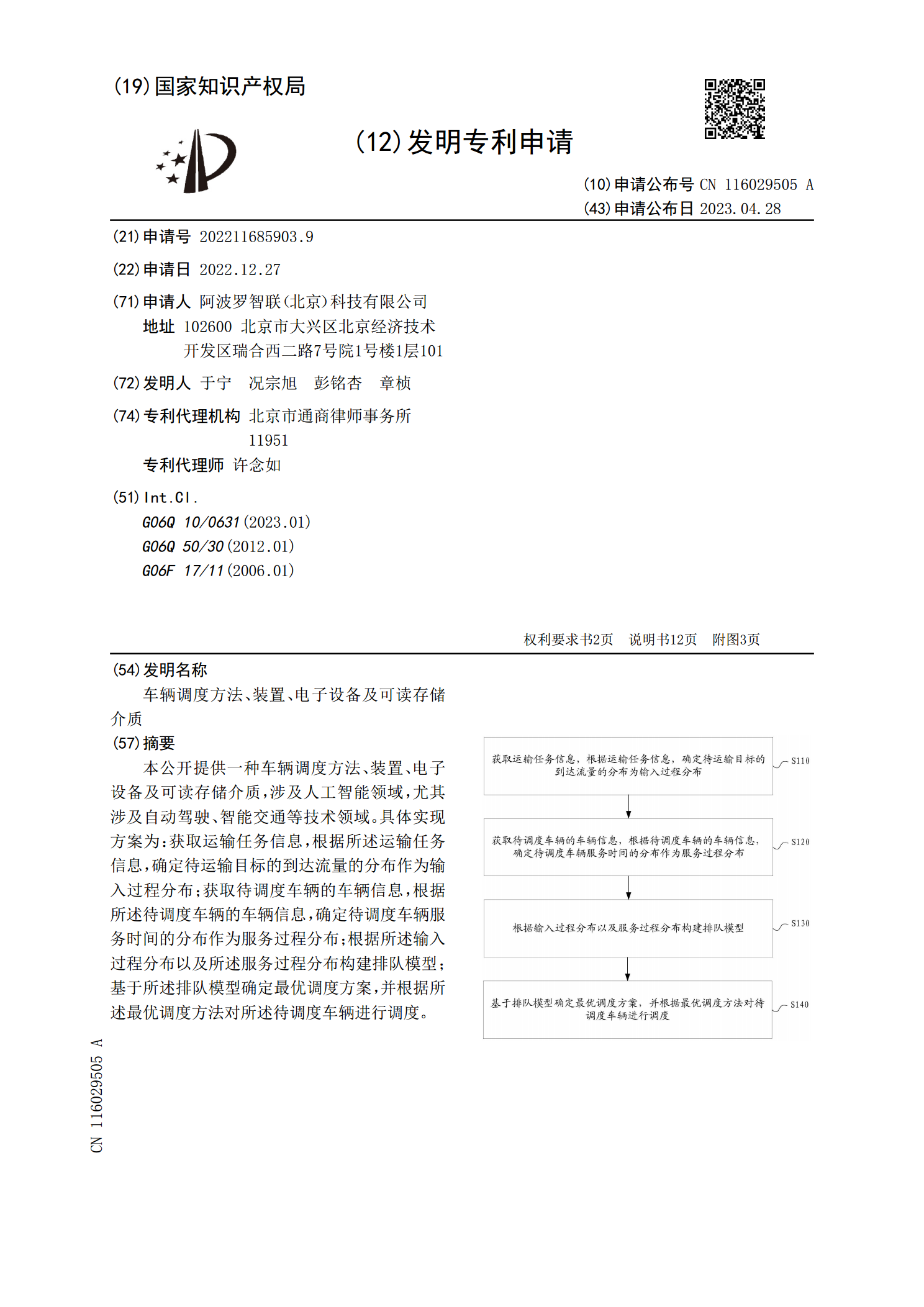
本公开提供一种车辆调度方法、装置、电子设备及可读存储介质,涉及人工智能领域,尤其涉及自动驾驶、智能交通等技术领域。具体实现方案为:获取运输任务信息,根据所述运输任务信息,确定待运输目标的到达流量的分布作为输入过程分布;获取待调度车辆的车辆信息,根据所述待调度车辆的车辆信息,确定待调度车辆服务时间的分布作为服务过程分布;根据所述输入过程分布以及所述服务过程分布构建排队模型;基于所述排队模型确定最优调度方案,并根据所述最优调度方法对所述待调度车辆进行调度。