
一种基于改进遗传算法的超超临界机组主汽温PID控制方法.pdf

努力****振宇

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于改进遗传算法的超超临界机组主汽温PID控制方法.pdf
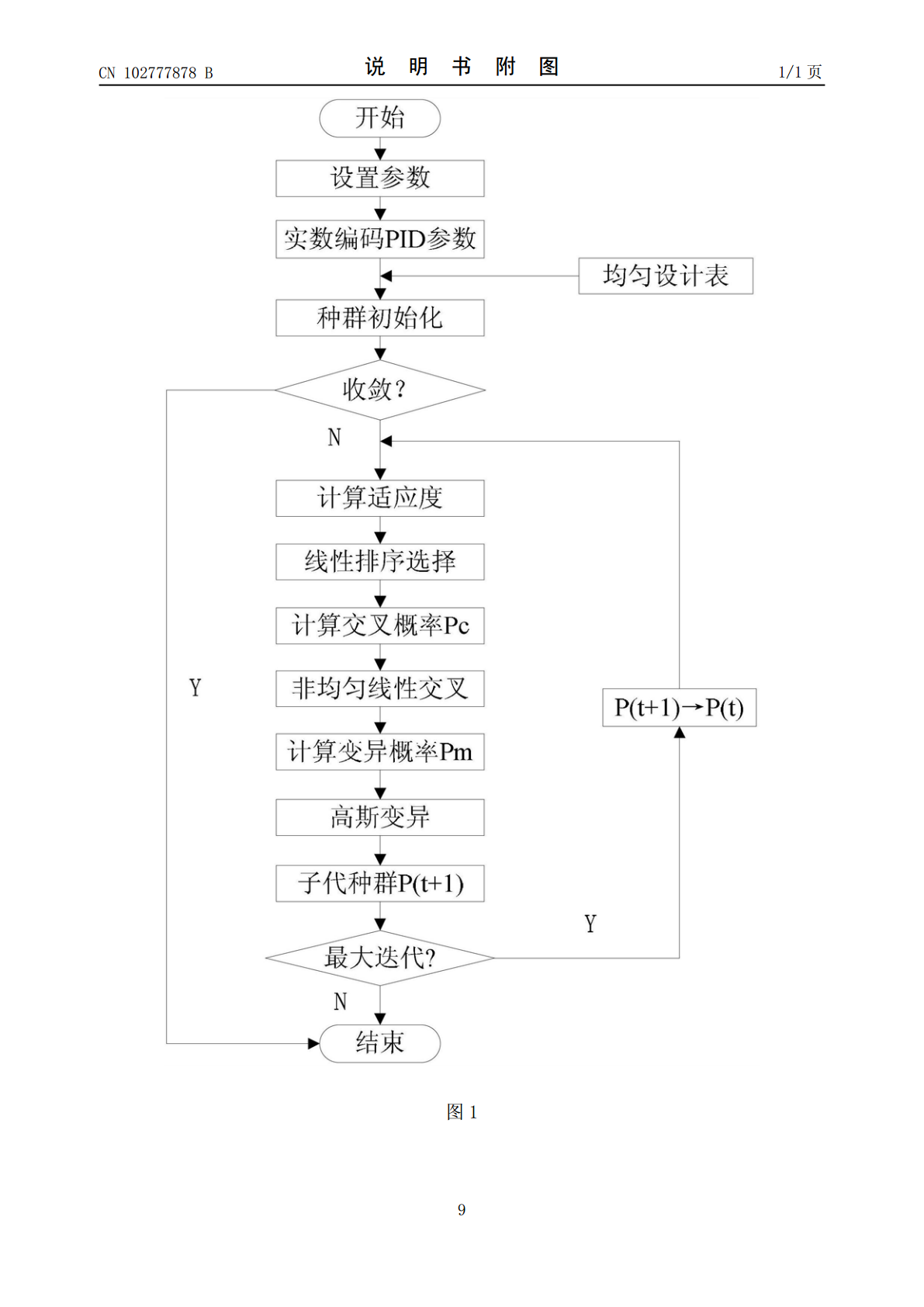
本发明提供了一种基于改进遗传算法的火力发电厂锅炉发电超超临界机组主汽温PID控制方法,方法中包括有改进遗传算法。本发明的改进遗传算法对简单遗传算法进行了改进,引入排序保优选择、非均匀线性交叉和高斯变异算子,采用均匀设计方法构造初始种群,通过Sigmoid函数适应性调整交叉和变异概率;采用面向DCS系统的PID控制器,该控制器在分负荷段下的参数集通过改进的遗传算法寻优得到。本发明提高了遗传算法的寻优速度和精度,可以代替工程复杂且准确性不高的工程整定方法,降低了现场调试人员的工作量,达到主汽温智能控制的目的,

基于遗传算法的超临界机组主汽温度控制研究.docx
基于遗传算法的超临界机组主汽温度控制研究引言:超临界机组是目前电力工业中使用最为广泛的发电设备之一,其主汽温度控制系统是确保机组安全、稳定、高效运行的重要组成部分。然而,在超临界机组主汽温度控制过程中,由于受到诸如负荷变化、外部环境影响等因素的制约,控制效果常常不尽如人意。基于此,研究如何优化超临界机组主汽温度控制,提高机组的运行效率和稳定性,具有重要的实际意义和应用价值。遗传算法作为一种全局优化算法,在优化问题的求解中被广泛应用。本文旨在探究如何基于遗传算法对超临界机组主汽温度控制进行优化,提高其控制效

基于改进型Smith预估器的超临界机组主汽温模糊控制系统.docx
基于改进型Smith预估器的超临界机组主汽温模糊控制系统一、问题描述超临界机组的主汽温度是影响机组安全和性能的重要参数。为了保证机组的安全性和稳定性,需要设计一个主汽温模糊控制系统,能够当外部环境变化或内部故障发生时,能够快速响应,调节主汽温度达到控制目标,保证机组的安全和稳定运行。二、控制系统设计在超临界机组中,主汽温度变化的原因主要有三个:燃煤质量不稳定、机组负荷变化以及氧化铝管堵塞等,这些因素都会对主汽温度产生影响。针对这些问题,需要设计一个主汽温模糊控制系统,能够根据实际情况及时调整主汽温度,达到

超临界机组RB试验主汽温低异常的分析与改进.docx
超临界机组RB试验主汽温低异常的分析与改进超临界机组的RB试验是为了测试超临界机组的性能和稳定性而进行的,其中主汽温是一个重要指标。主汽温低异常可能导致超临界机组的正常运行受到影响,因此对这种情况进行分析和改进具有重要意义。首先,我们需要了解超临界机组的RB试验以及主汽温的意义。RB试验是超临界机组运行最常见的试验之一,该试验通过控制主汽温来测试机组的负荷响应能力和稳定性。主汽温是进入汽轮机的高温高压蒸汽的温度,直接影响机组的热效率和产能。主汽温低异常可能由多种原因引起,包括燃烧系统故障、给水系统问题、热

超超临界机组主汽温分布式监督预测控制的开题报告.docx
超超临界机组主汽温分布式监督预测控制的开题报告引言:随着电力工业不断发展,超超临界机组的使用成为了一种趋势。超超临界机组具有效率高、节能环保等优势,但由于运行条件的复杂性,超超临界机组也面临着一些挑战。其中,主汽温的控制是超超临界机组运行中较为重要的一个环节,对主汽温的监控和控制对于机组的安全运行和稳定性有着至关重要的作用。目的:为了进一步提高超超临界机组运行的安全性、可靠性和经济性,本文提出了基于分布式监督预测控制的主汽温控制方法,以提高超超临界机组的运行效率和能源利用率。方法:1.数据采集通过对超超临