
一种工业设备炉衬剥落的动态监测装置及监测方法.pdf

春岚****23

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种工业设备炉衬剥落的动态监测装置及监测方法.pdf
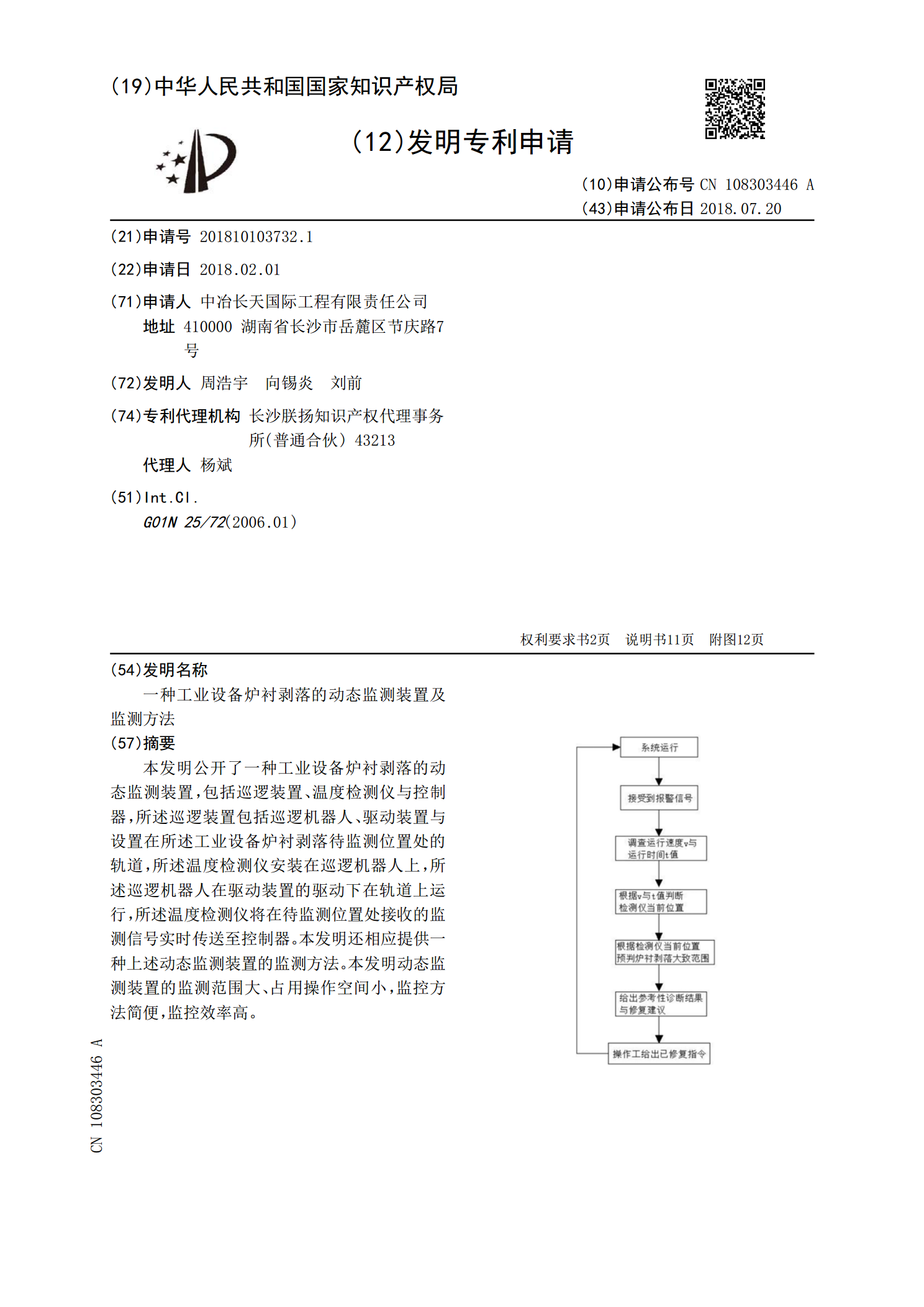
本发明公开了一种工业设备炉衬剥落的动态监测装置,包括巡逻装置、温度检测仪与控制器,所述巡逻装置包括巡逻机器人、驱动装置与设置在所述工业设备炉衬剥落待监测位置处的轨道,所述温度检测仪安装在巡逻机器人上,所述巡逻机器人在驱动装置的驱动下在轨道上运行,所述温度检测仪将在待监测位置处接收的监测信号实时传送至控制器。本发明还相应提供一种上述动态监测装置的监测方法。本发明动态监测装置的监测范围大、占用操作空间小,监控方法简便,监控效率高。
一种陶瓷隧道窑炉衬剥落的动态监测装置及监测方法.pdf
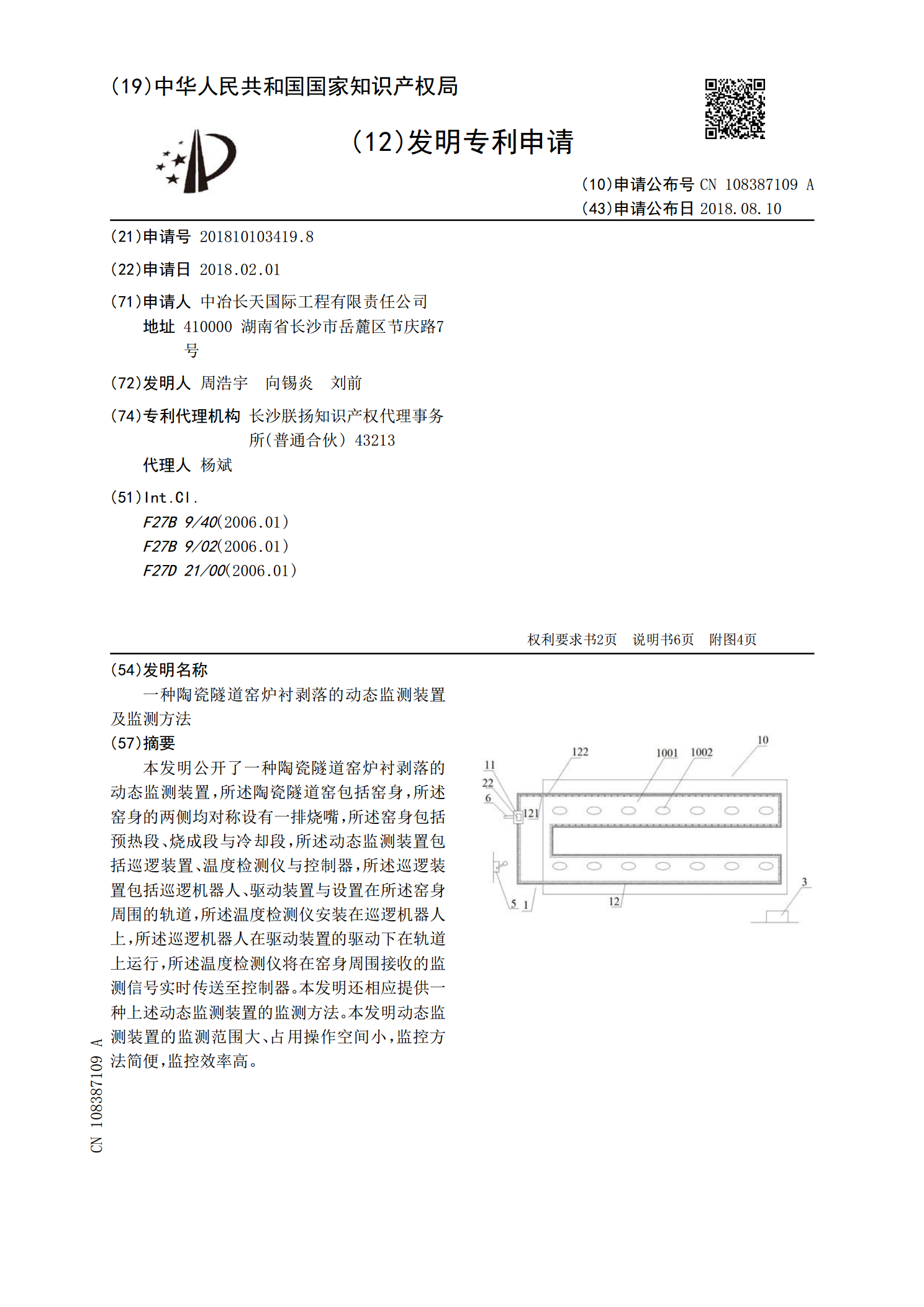
本发明公开了一种陶瓷隧道窑炉衬剥落的动态监测装置,所述陶瓷隧道窑包括窑身,所述窑身的两侧均对称设有一排烧嘴,所述窑身包括预热段、烧成段与冷却段,所述动态监测装置包括巡逻装置、温度检测仪与控制器,所述巡逻装置包括巡逻机器人、驱动装置与设置在所述窑身周围的轨道,所述温度检测仪安装在巡逻机器人上,所述巡逻机器人在驱动装置的驱动下在轨道上运行,所述温度检测仪将在窑身周围接收的监测信号实时传送至控制器。本发明还相应提供一种上述动态监测装置的监测方法。本发明动态监测装置的监测范围大、占用操作空间小,监控方法简便,监控
一种转底炉炉顶炉衬剥落的动态监测装置及监测方法.pdf
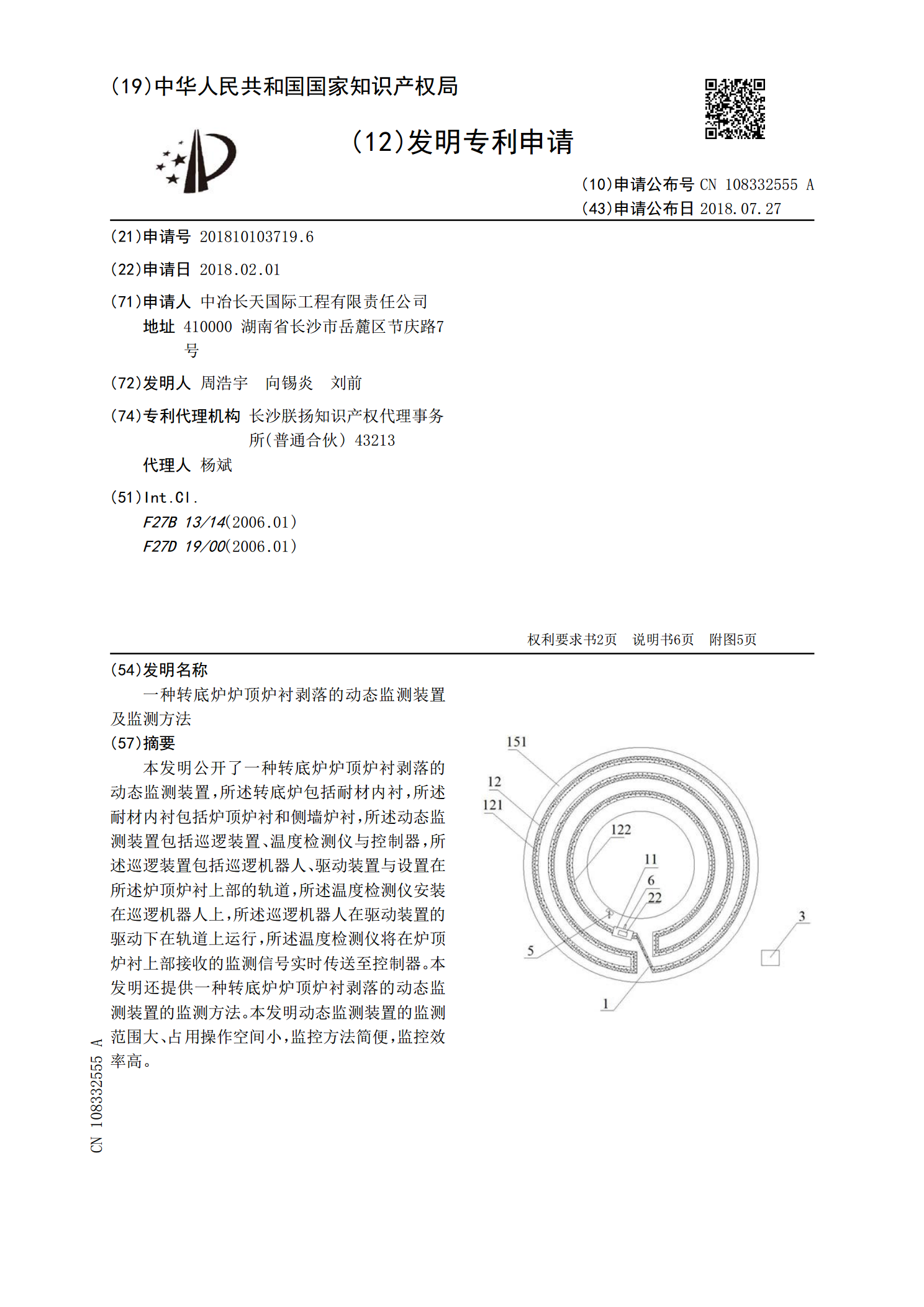
本发明公开了一种转底炉炉顶炉衬剥落的动态监测装置,所述转底炉包括耐材内衬,所述耐材内衬包括炉顶炉衬和侧墙炉衬,所述动态监测装置包括巡逻装置、温度检测仪与控制器,所述巡逻装置包括巡逻机器人、驱动装置与设置在所述炉顶炉衬上部的轨道,所述温度检测仪安装在巡逻机器人上,所述巡逻机器人在驱动装置的驱动下在轨道上运行,所述温度检测仪将在炉顶炉衬上部接收的监测信号实时传送至控制器。本发明还提供一种转底炉炉顶炉衬剥落的动态监测装置的监测方法。本发明动态监测装置的监测范围大、占用操作空间小,监控方法简便,监控效率高。
一种工业设备险情的动态监测装置.pdf
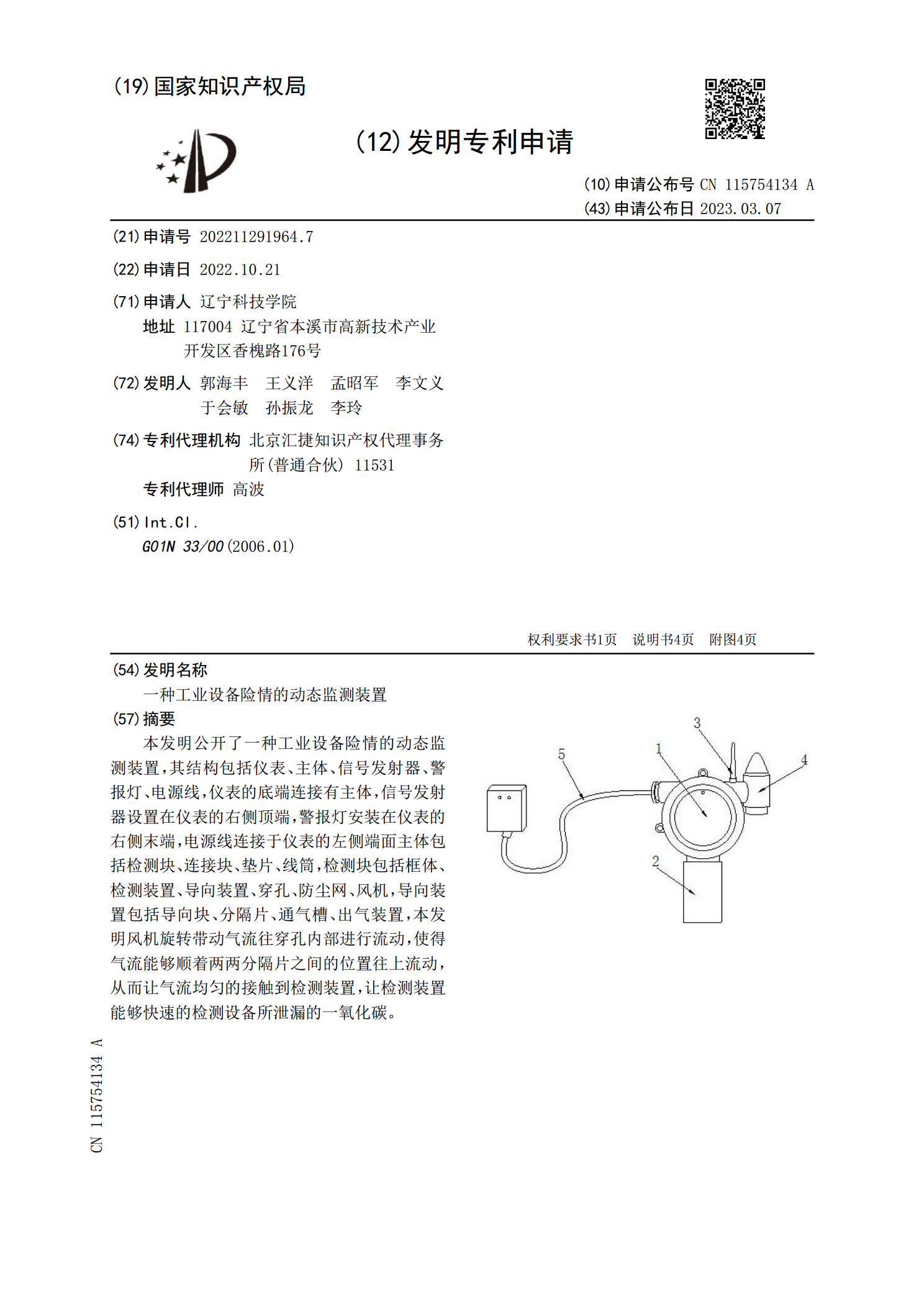
本发明公开了一种工业设备险情的动态监测装置,其结构包括仪表、主体、信号发射器、警报灯、电源线,仪表的底端连接有主体,信号发射器设置在仪表的右侧顶端,警报灯安装在仪表的右侧末端,电源线连接于仪表的左侧端面主体包括检测块、连接块、垫片、线筒,检测块包括框体、检测装置、导向装置、穿孔、防尘网、风机,导向装置包括导向块、分隔片、通气槽、出气装置,本发明风机旋转带动气流往穿孔内部进行流动,使得气流能够顺着两两分隔片之间的位置往上流动,从而让气流均匀的接触到检测装置,让检测装置能够快速的检测设备所泄漏的一氧化碳。
一种烧结设备CO泄漏的动态监测装置及监测方法.pdf
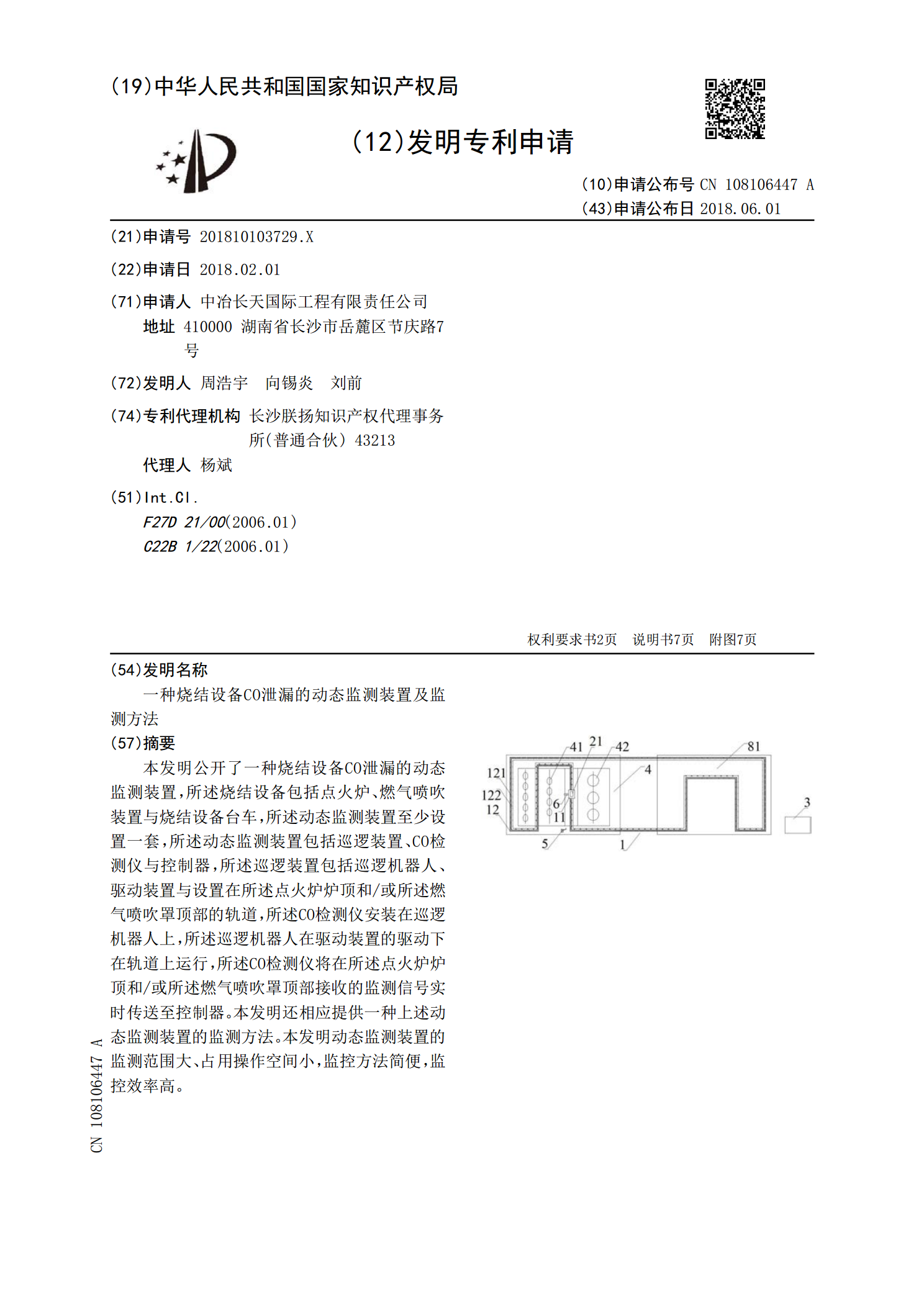
本发明公开了一种烧结设备CO泄漏的动态监测装置,所述烧结设备包括点火炉、燃气喷吹装置与烧结设备台车,所述动态监测装置至少设置一套,所述动态监测装置包括巡逻装置、CO检测仪与控制器,所述巡逻装置包括巡逻机器人、驱动装置与设置在所述点火炉炉顶和/或所述燃气喷吹罩顶部的轨道,所述CO检测仪安装在巡逻机器人上,所述巡逻机器人在驱动装置的驱动下在轨道上运行,所述CO检测仪将在所述点火炉炉顶和/或所述燃气喷吹罩顶部接收的监测信号实时传送至控制器。本发明还相应提供一种上述动态监测装置的监测方法。本发明动态监测装置的监测