
一种用于锅炉内圆管焊接的焊缝跟踪方法.pdf

含平****ng


1/10

2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于锅炉内圆管焊接的焊缝跟踪方法.pdf
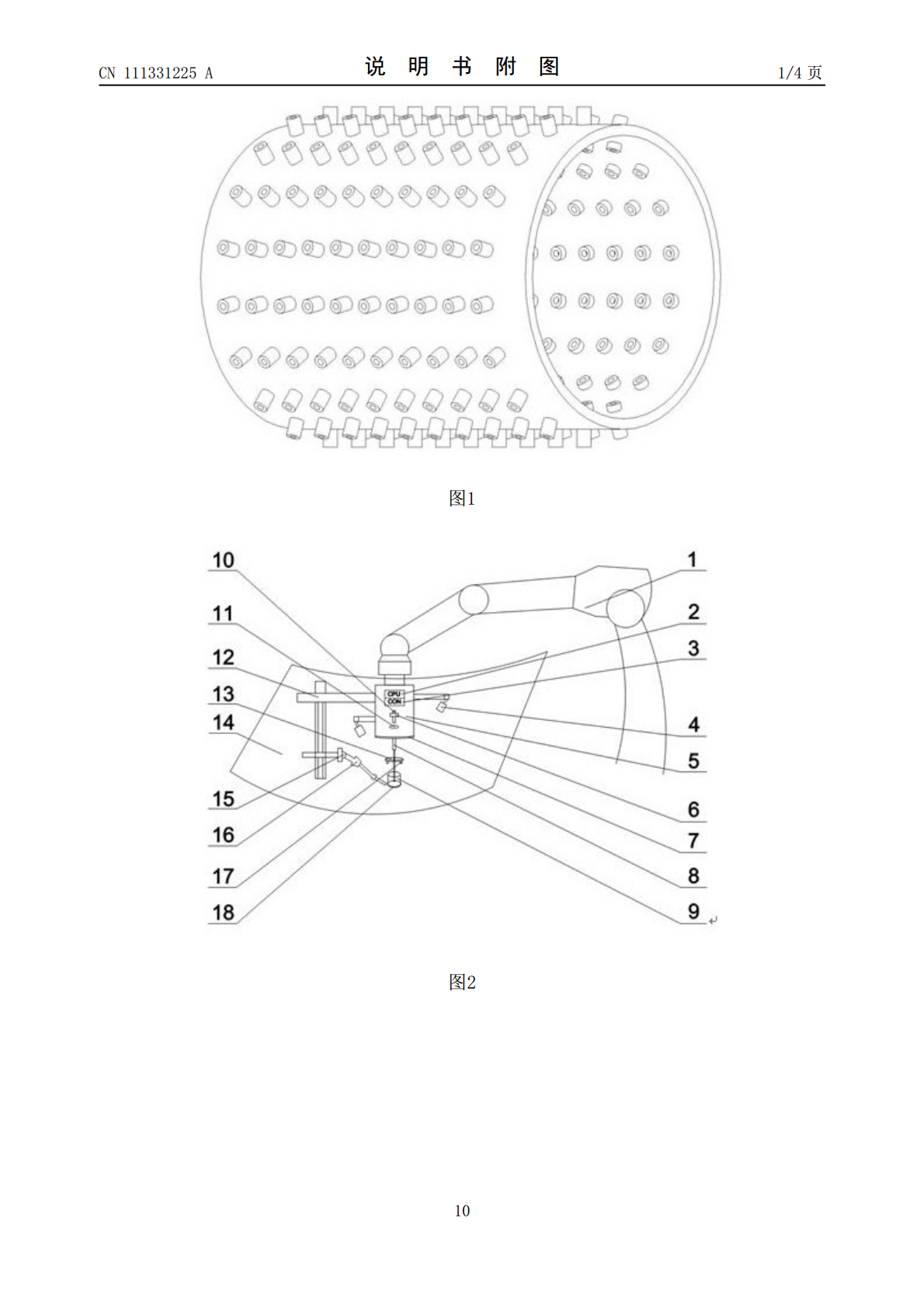
本发明提出了一种用于锅炉内圆管焊接的焊缝跟踪方法,能够实现锅炉内圆管焊接的焊缝跟踪。方法采用的系统主要包括激光视觉联合初步定位模块、焊枪位置与姿态调节模块、超声波焊缝实时跟踪模块、机器人手臂、计算机控制模块。该方法在计算机控制模块、机器人手臂的配合下,依据自主设计的“多角度综合求权加权平均法”算法采取激光视觉联合定位方法完成焊接开始前的初步定位,然后采用超声波跟踪方法来实现焊接过程中的精确定位与实时纠偏,最终实现锅炉内圆管焊接焊缝跟踪。本发明的优点在于采用激光视觉联合定位方法实现了对圆管的定位和焊缝信息的
一种锅炉内壁圆管环角焊缝的自动焊接装置.pdf
本发明公开了一种用于锅炉内壁圆管环角焊缝的自动焊接装置,本发明提供的装置主要用于解决锅炉内壁与对流圆管形成的环角焊缝的自动焊接问题,本发明通过合理的结构布局,采用前置式单目交叉激光定位系统、贴片式双电容位移传感焊枪姿态实时调节系统对锅炉内壁与对流圆管形成的环角焊缝进行精确定位与跟踪,具体为基于前置式单目交叉激光定位系统对各对流圆管进行定位进而实现对焊缝轨迹的预判,同时通过贴片式双电容位移传感焊枪姿态实时调节系统对焊枪姿态进行实时调节,本发明非常适合于锅炉内壁与密布对流圆管形成的狭小空间环境下环角焊缝的精确
一种焊缝跟踪装置及焊接方法.pdf
本发明涉及焊接自动化技术,具体是指一种通过视觉镜头和一字型激光定位器实时采集图像从而进行焊接的焊缝跟踪装置及焊接方法,包括三维伺服控制机械手(1)、跟踪支撑机构(2)、视觉激光定位跟踪组件(3),所述三维伺服控制机械手(1)包括转动关节一(11)、转动关节二(12)和转动关节三(13),所述转动关节一(11)、转动关节二(12)和转动关节三(13)依次转动配合,所述跟踪支承机构(2)包括跟踪支撑架(21)和行走轮(22),所述跟踪支撑架(21)的一端安装在转动关节三(13)的底部,所述跟踪支撑架(21)的

一种采用内孔焊焊接锅炉烟管与管板连接焊缝的焊接方法.pdf
一种采用内孔焊焊接锅炉烟管与管板连接焊缝的焊接方法,其步骤如下:(1)在管板上制作出管孔;(2)将烟管插入到管孔中;(3)在烟管与各管板上的管孔之间在所述烟管内进行内孔焊焊接连接,形成了连接烟管与管板的环形焊缝。本发明的有益效果:连接强度好,防止管板裂纹产生。

一种锅炉圆管焊接定位方法及终端.pdf
本发明提供了一种锅炉圆管焊接定位方法及终端,控制激光扫描装置沿圆管预设排布方向移动,获取扫描数据;根据圆管识别阈值在所述扫描数据中确认圆管对应的线扫信息;根据所述线扫信息确定所述圆管的圆心位置;根据所述圆心位置调整焊接机器人的焊接中心位置并进行焊接作业;本发明通过激光扫描进行定位并且沿预设的排布方向进行扫描,则一次只扫描一个方向上的圆管位置,实现逐层扫描,增加了对圆管定位的精确性,并且根据确定的圆管的圆心位置调整机器人的焊接中心位置,保证了焊接位置和圆管位置的对应,通过圆心计算出圆弧的位置也提高了对圆管进