
周期双向脉冲控制单晶炉软轴提拉系统无序摆动方法.pdf

海昌****姐淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

周期双向脉冲控制单晶炉软轴提拉系统无序摆动方法.pdf
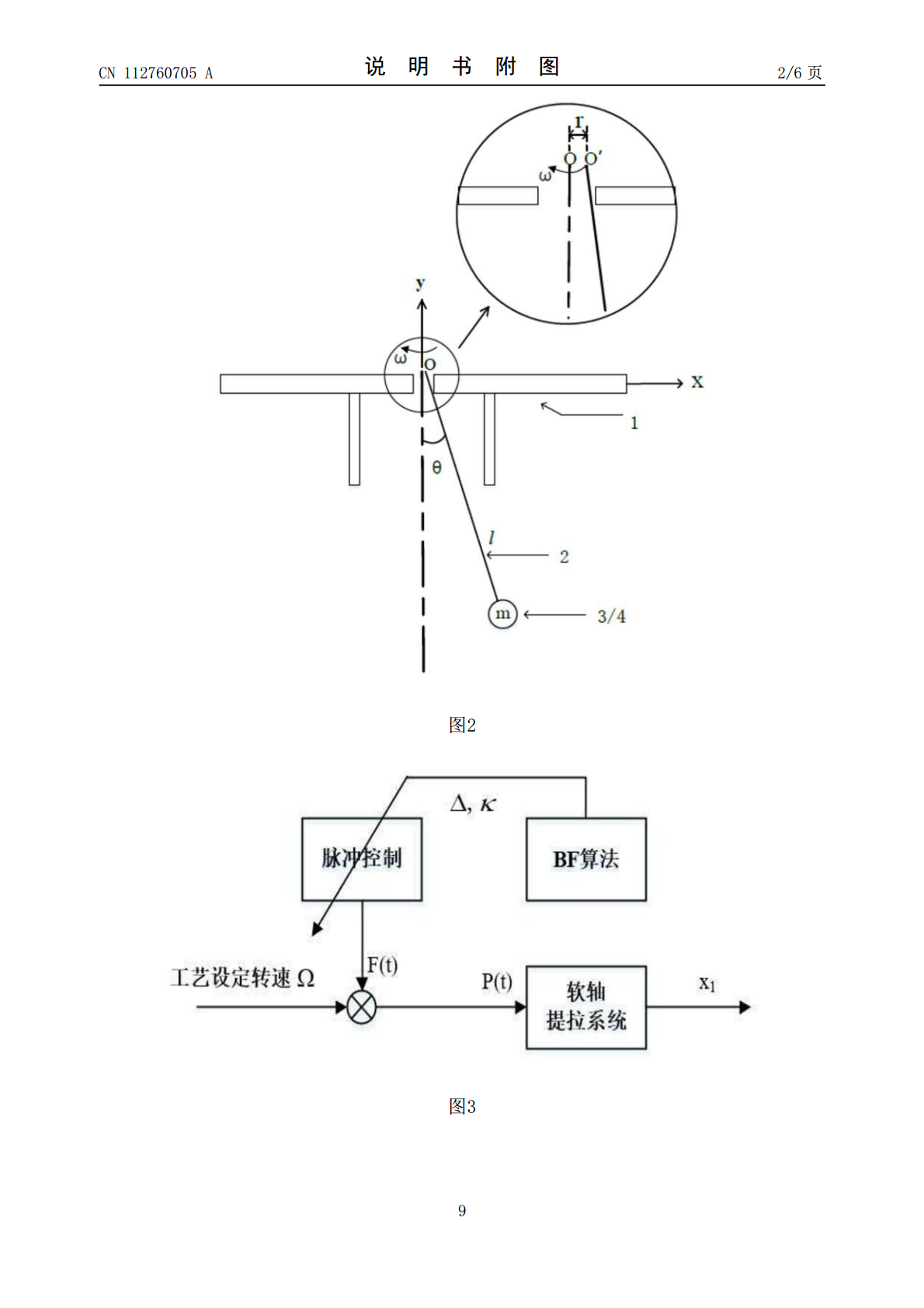
本发明公开了一种周期双向脉冲控制单晶炉软轴提拉系统无序摆动方法,步骤包括:步骤1、构建晶体生长软轴提拉系统的动力学模型;步骤2、设置针对软轴提拉系统的周期双向脉冲控制器,设计一个周期双向脉冲控制器,在一个旋转周期内等时间间隔对转速施加一个负脉冲和一个正脉冲,正负脉冲交替应用,使得软轴提拉系统的平均转速不变;步骤3、利用BF算法确定周期双向脉冲控制器的控制参数的选择范围。本发明的方法,可以抑制软轴系统在晶体生长中的无序摆动,使摆动处于周期一运动状态;无需状态反馈,控制器设置简单,控制间歇加入,不改变系统平均

一种周期单脉冲控制单晶炉软轴提拉系统非周期摆动方法.pdf
本发明公开了一种周期单脉冲控制单晶炉软轴提拉系统非周期摆动方法,步骤包括:步骤1、构建晶体生长软轴提拉系统的动力学模型;步骤2、构建周期单脉冲控制器;外部唯一可以操作的变量是晶转速度Ω,选择脉冲控制能够减少对平均转速的影响,也就是减小对工艺参数的影响;步骤3、确定周期单脉冲控制器的参数选择范围。本发明的方法,可以抑制软轴系统在晶体生长中出现的非周期运动,使摆动处于周期状态;无需状态反馈,控制器设置简单,控制间歇加入,对转速扰动小,控制器能效高。
一种单晶炉及抑制单晶炉的软轴摆动的方法.pdf
本发明公开一种单晶炉和抑制单晶炉的软轴摆动的方法。公开的单晶炉包括炉体、提拉装置、坩埚和软轴;还包括控制器、位置监测器和位于炉体外的至少一个磁场发生器;软轴的上端与坩埚形成直流导电回路;控制器输入端与位置监测器相连,位置监测器获取软轴的位置信息;控制器的输出端与磁场发生器相连,或/和,与所述的直流导电回路相连。与现有技术中被动地对软轴施加作用力不同,本发明提供的技术方案不依赖于软轴实际的摆动幅度,可以主动地对软轴施加作用力,从而更好地抑制软轴的摆动;更重要地是,利用本发明的提供的单晶炉还能够对软轴下端的单

基于机器视觉的单晶炉提拉装置摆动量检测方法研究.docx
基于机器视觉的单晶炉提拉装置摆动量检测方法研究摘要:随着工业自动化的发展和进步,对于生产过程中的监测和控制要求越来越高。本文针对单晶炉提拉装置摆动量的检测问题,提出了一种基于机器视觉的检测方法。第一章引言1.1研究背景和意义1.2文章结构安排第二章相关技术介绍2.1机器视觉技术2.2单晶炉提拉装置摆动量检测技术第三章系统架构与设计3.1系统整体架构3.2硬件设计3.3软件设计第四章算法设计与实现4.1图像预处理4.2特征提取与选择4.3摆动量计算算法第五章实验与结果分析5.1实验准备与数据采集5.2实验结

全自动提拉单晶炉系统控制技术.docx
全自动提拉单晶炉系统控制技术全自动提拉单晶炉系统控制技术摘要:全自动提拉单晶炉系统是单晶生长过程中的重要设备,对于材料的纯度和晶体质量具有举足轻重的影响。本论文主要研究全自动提拉单晶炉系统的控制技术,通过分析系统的结构和工作原理,讨论了全自动提拉单晶炉系统的控制需求,并提出了相应的控制策略。在此基础上,还介绍了几种典型的控制方法,并对其进行比较和评估。最后,对未来全自动提拉单晶炉系统控制技术的发展进行了展望。关键词:全自动提拉单晶炉系统;控制技术;控制需求;控制策略;控制方法第1章引言全自动提拉单晶炉系统