
一种精炼炉钢包车定位方法.pdf

Ch****91


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种精炼炉钢包车定位方法.pdf
本申请提供一种精炼炉钢包车定位方法。方法包括:获取变频器输出的与电动机的转速对应的当前电流信号及与当前电流信号对应的转动时长;根据电流信号与电动机的转速的对应关系,确定与当前电流信号对应的电动机的目标转速;基于目标转速、转动时长及历史转动圈数,确定电动机的当前转动圈数,历史转动圈数为电动机在转动时长前的转动圈数;根据电动机的当前转动圈数与相应指定位置的对应关系,确定当前转动圈数对应的钢包车的当前位置。如此,无需在钢包车上安装编码器,也无需在钢包车的行驶路径上设置碰撞行程开关,从而有利于提高钢包车定位的抗干

一种钢包车式钢包精炼炉的废钢加入方法.pdf
本发明涉及冶金精炼技术领域,提供了一种钢包车式钢包精炼炉的废钢加入方法,包括如下步骤:S1‑S5五个步骤。其中S3步骤为当其中一个废钢加料小车运送废钢至其对应的钢包车时,另一个钢包车对应的废钢加料小车也运送废钢或准备运送废钢至与其对应的钢包车,而剩下的两个废钢加料小车均不动作且也不准备动作,S4步骤为当接收了废钢的钢包车运送废钢至精炼炉时,另一钢包车不动作,准备运送废钢至与其对应的钢包车的废钢加料小车开始动作;当位于精炼炉的钢包车回到原位或在回到原位的途中时,另一个钢包车运送废钢至精炼炉。本发明通过采用两
一种实现钢包车快速定位的方法.pdf
本发明属于转炉冶炼技术领域,具体涉及一种实现钢包车快速定位的方法,包括以下步骤:转炉钢包座包;转炉钢包座好后,放钢工从氩站操作箱开动钢包车;钢包车开到炉后平台下方大体位置后,将操作权转换到放钢操作室;从放钢操作室开动钢包车到钢包车等待位置后停电;在钢包车电缆卷筒下方位置电缆上做标记;再次开钢包车时,当开到电缆上做的标记出现的定位点时停车,此时钢包车正好位于等待位。不需要从放钢操作室再次确定钢包车位置,实现钢包车快速定位,节省准备放钢时开钢包车的时间,费用低廉,不需要大的资金投入,能避免钢包车开过等待位后炉
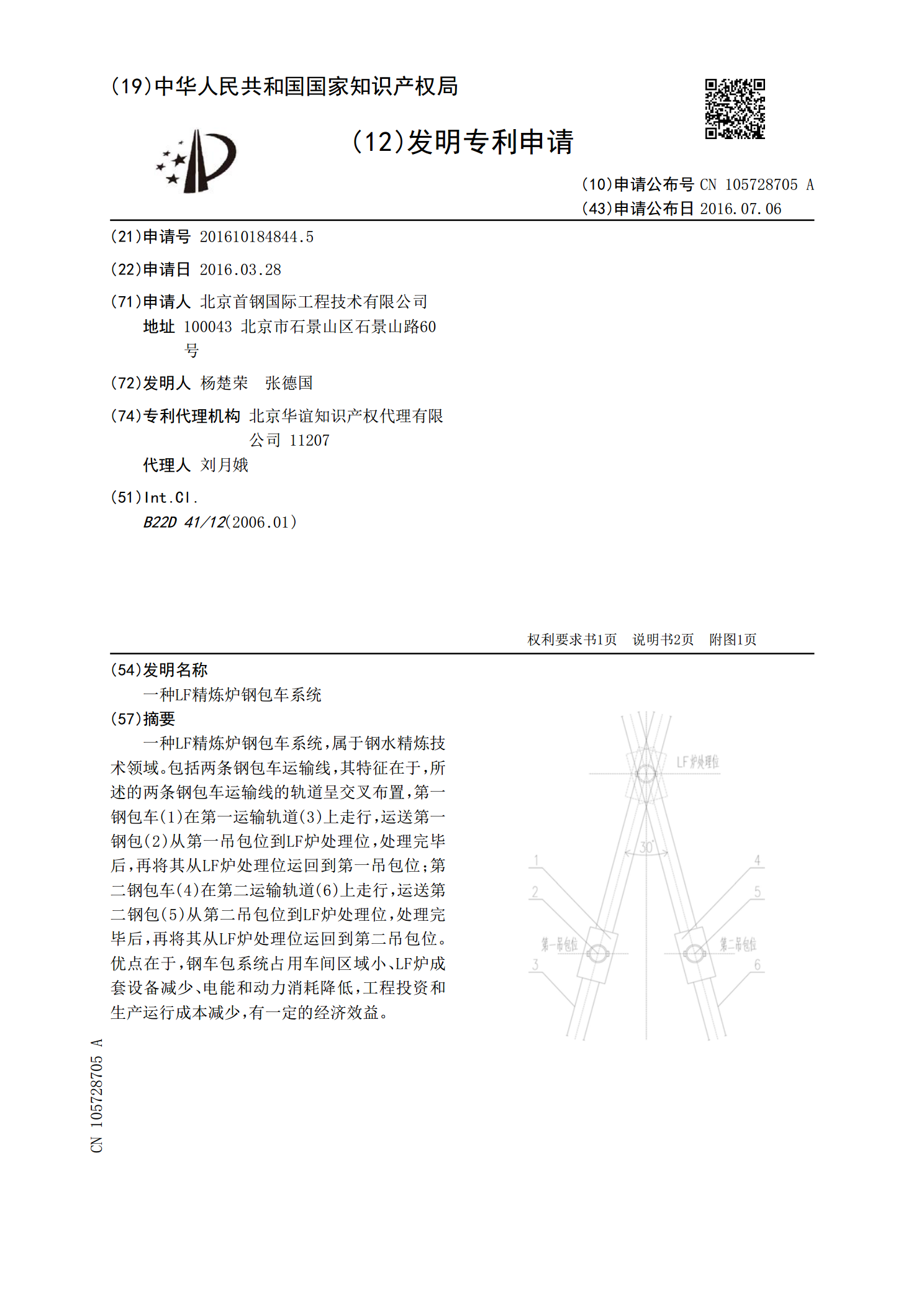
一种LF精炼炉钢包车系统.pdf
一种LF精炼炉钢包车系统,属于钢水精炼技术领域。包括两条钢包车运输线,其特征在于,所述的两条钢包车运输线的轨道呈交叉布置,第一钢包车(1)在第一运输轨道(3)上走行,运送第一钢包(2)从第一吊包位到LF炉处理位,处理完毕后,再将其从LF炉处理位运回到第一吊包位;第二钢包车(4)在第二运输轨道(6)上走行,运送第二钢包(5)从第二吊包位到LF炉处理位,处理完毕后,再将其从LF炉处理位运回到第二吊包位。优点在于,钢车包系统占用车间区域小、LF炉成套设备减少、电能和动力消耗降低,工程投资和生产运行成本减少,有一

一种车轴钢LF精炼炉造渣方法.pdf
一种车轴钢LF精炼炉造渣方法,包括:(1)随钢包加入石灰300kg,合成渣300kg;所述合成渣的组元质量百分比是:Al2O3为32-38%;CaO为40-50%;SiO2为4-7%;MgO为5-11%;Fe2O3为1-5%;TiO2为1-2%;熔点≤1380℃;(2)在LF炉精炼进入工位时加入电石125kg和铝丸70kg;(3)精炼终渣的化学成分质量百分含量是:CaO为51-58%,Al2O3为24.5-33.7%,SiO2为3.4-6.6%,MgO为5.4-7.5%,FeO为0.25~0.64,MnO