
一种用于立式炉的自动上下料系统及立式炉体.pdf

一吃****瀚文

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于立式炉的自动上下料系统及立式炉体.pdf
本发明公开了一种用于立式炉的自动上下料系统,包括石英舟取放装置、翻舟装置、硅片顶升装置、整片装置、插取片机械手和硅片上下料传输装置;石英舟取放装置用于带动石英舟在缓存架、反应腔和翻舟装置之间转移;翻舟装置用于实现石英舟在立式状态和卧式状态之间进行变换;硅片顶升装置用于带动硅片做升降运动;整片装置用于实现硅片的对中;插取片机械手用于带动硅片在硅片上下料传输装置和硅片顶升装置之间进行转移;硅片上下料传输装置用于实现硅片从花篮取出并传输至插取片机械手的取片位。本发明还公开了一种立体炉体,包括如上所述自动上下料系
一种用于立式裂化炉的炉体.pdf
一种用于立式裂化炉的炉体,由高温耐火材料制成,包括热解室与燃烧室,热解室位于炉体上部,燃烧室位于炉体下部,热解室与燃烧室之间设有炉排;炉排柱体连接有转动装置,按照设定的转速和方向转动。通过采用梯形或者壶形的燃烧室,使得燃烧室的热量经过内壁的热反射,更加集中,从而提高燃烧室的温度,提高燃烧区的工作温度,提高裂化炉工作效率。
立式炉及立式炉的炉体温度控制方法.pdf
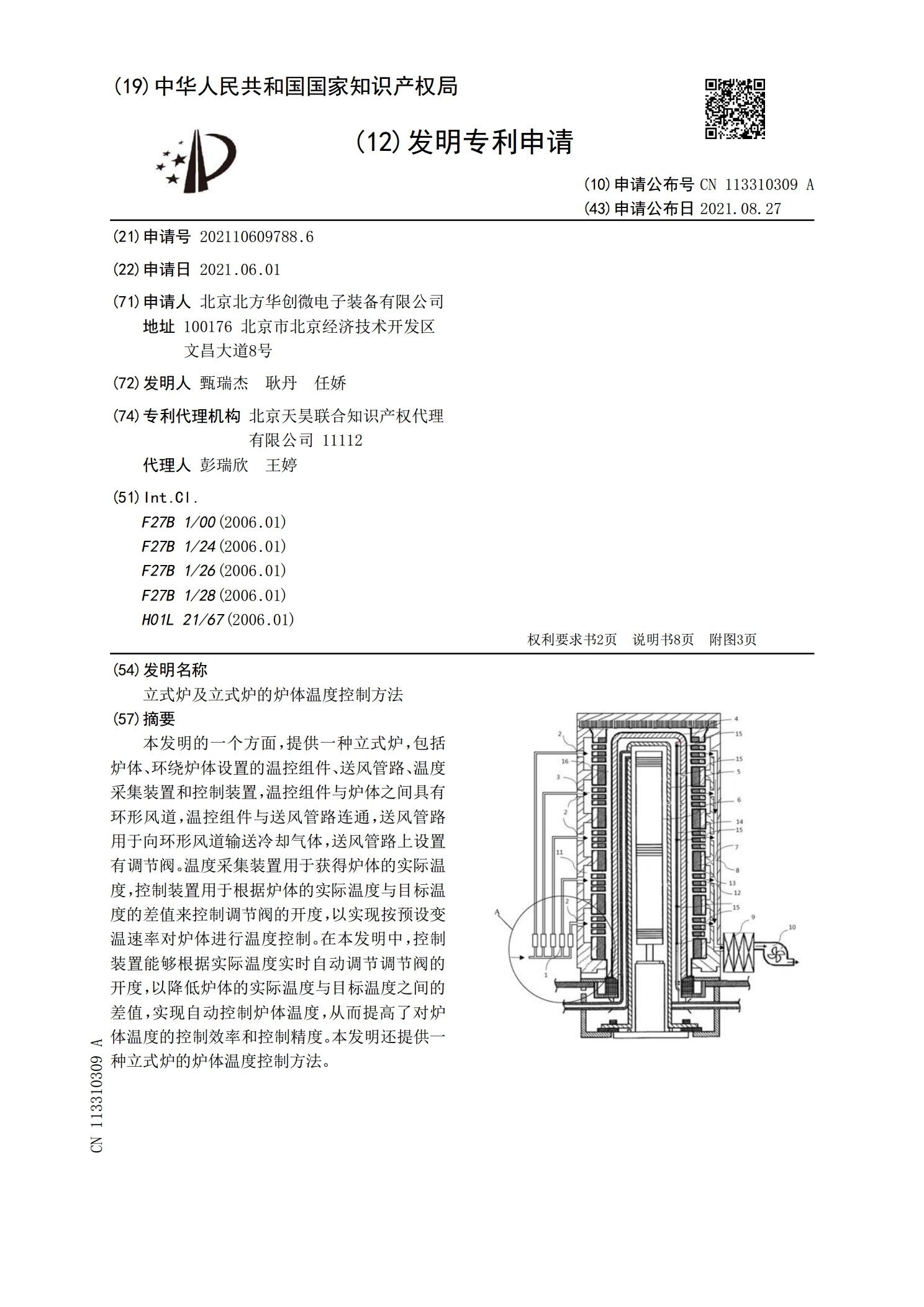
本发明的一个方面,提供一种立式炉,包括炉体、环绕炉体设置的温控组件、送风管路、温度采集装置和控制装置,温控组件与炉体之间具有环形风道,温控组件与送风管路连通,送风管路用于向环形风道输送冷却气体,送风管路上设置有调节阀。温度采集装置用于获得炉体的实际温度,控制装置用于根据炉体的实际温度与目标温度的差值来控制调节阀的开度,以实现按预设变温速率对炉体进行温度控制。在本发明中,控制装置能够根据实际温度实时自动调节调节阀的开度,以降低炉体的实际温度与目标温度之间的差值,实现自动控制炉体温度,从而提高了对炉体温度的控

立式氧化炉炉体半自动装卸装置.pdf
本发明公开了一种立式氧化炉炉体的装卸装置,包括主体框架,设于主体框架底部的运输定位机构,驱动传动机构,由驱动传动机构驱动转动的两个升降链轮,分别绕接于升降链轮的两条升降链条以及承载机构。主体框架包括两个垂直设置的立柱。承载机构包括升降托板及叉板,升降托板两侧分别与升降链条的一端固定连接且与立柱滑动连接,以随升降链条的运动沿着立柱上升或下降;叉板具有垂直部分和水平部分,所述水平部分用于承载立式氧化炉炉体;所述垂直部分扣合于升降托板,由升降托板的运动带动上升或下降。本发明的装卸装置集炉体运输与升降功能于一体,
用于立式炉的炉门组件和立式炉.pdf
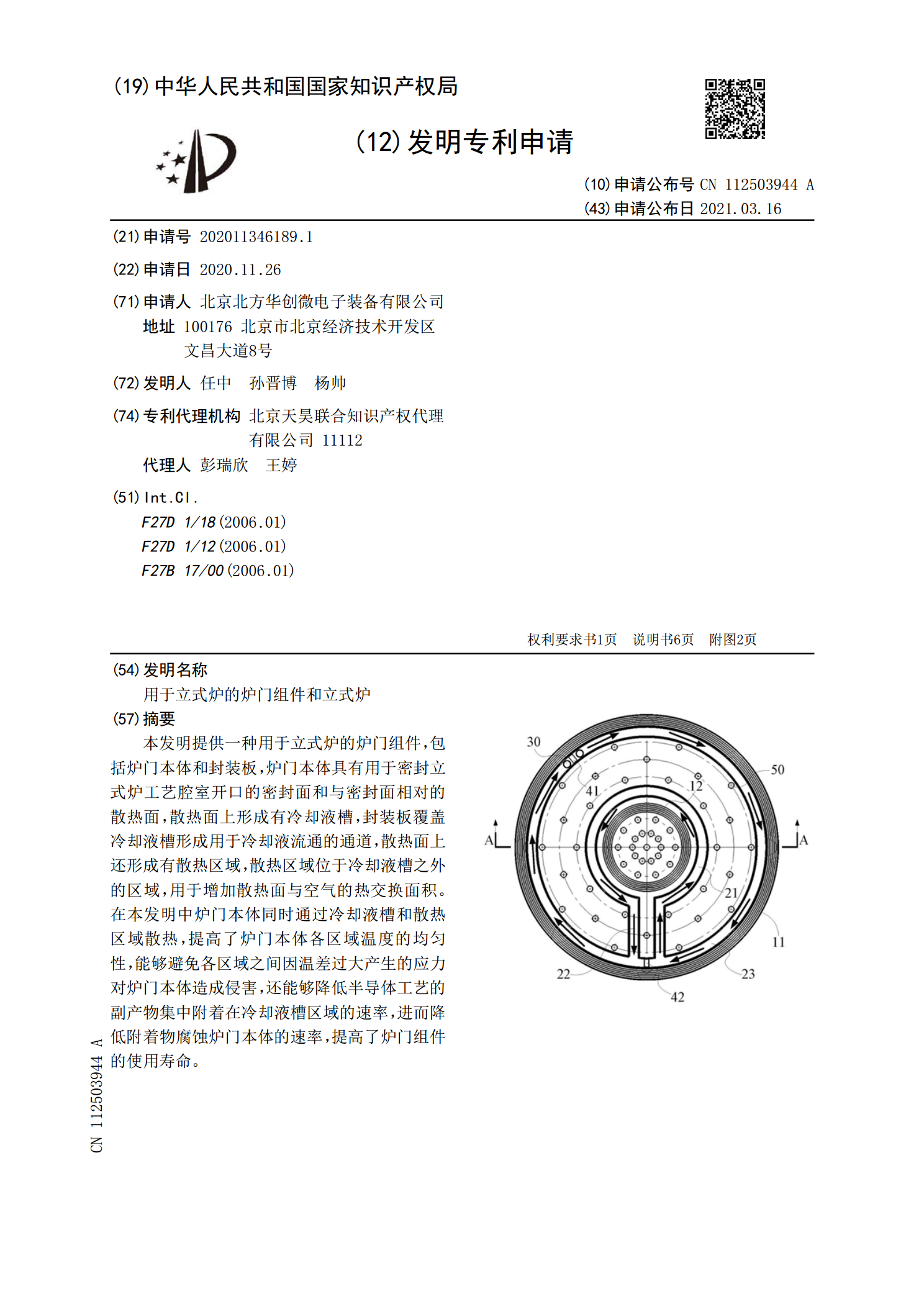
本发明提供一种用于立式炉的炉门组件,包括炉门本体和封装板,炉门本体具有用于密封立式炉工艺腔室开口的密封面和与密封面相对的散热面,散热面上形成有冷却液槽,封装板覆盖冷却液槽形成用于冷却液流通的通道,散热面上还形成有散热区域,散热区域位于冷却液槽之外的区域,用于增加散热面与空气的热交换面积。在本发明中炉门本体同时通过冷却液槽和散热区域散热,提高了炉门本体各区域温度的均匀性,能够避免各区域之间因温差过大产生的应力对炉门本体造成侵害,还能够降低半导体工艺的副产物集中附着在冷却液槽区域的速率,进而降低附着物腐蚀炉门