
位置检测与定位装置、方法及其系统和系统的定位方法.pdf

一吃****昕靓


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

位置检测与定位装置、方法及其系统和系统的定位方法.pdf
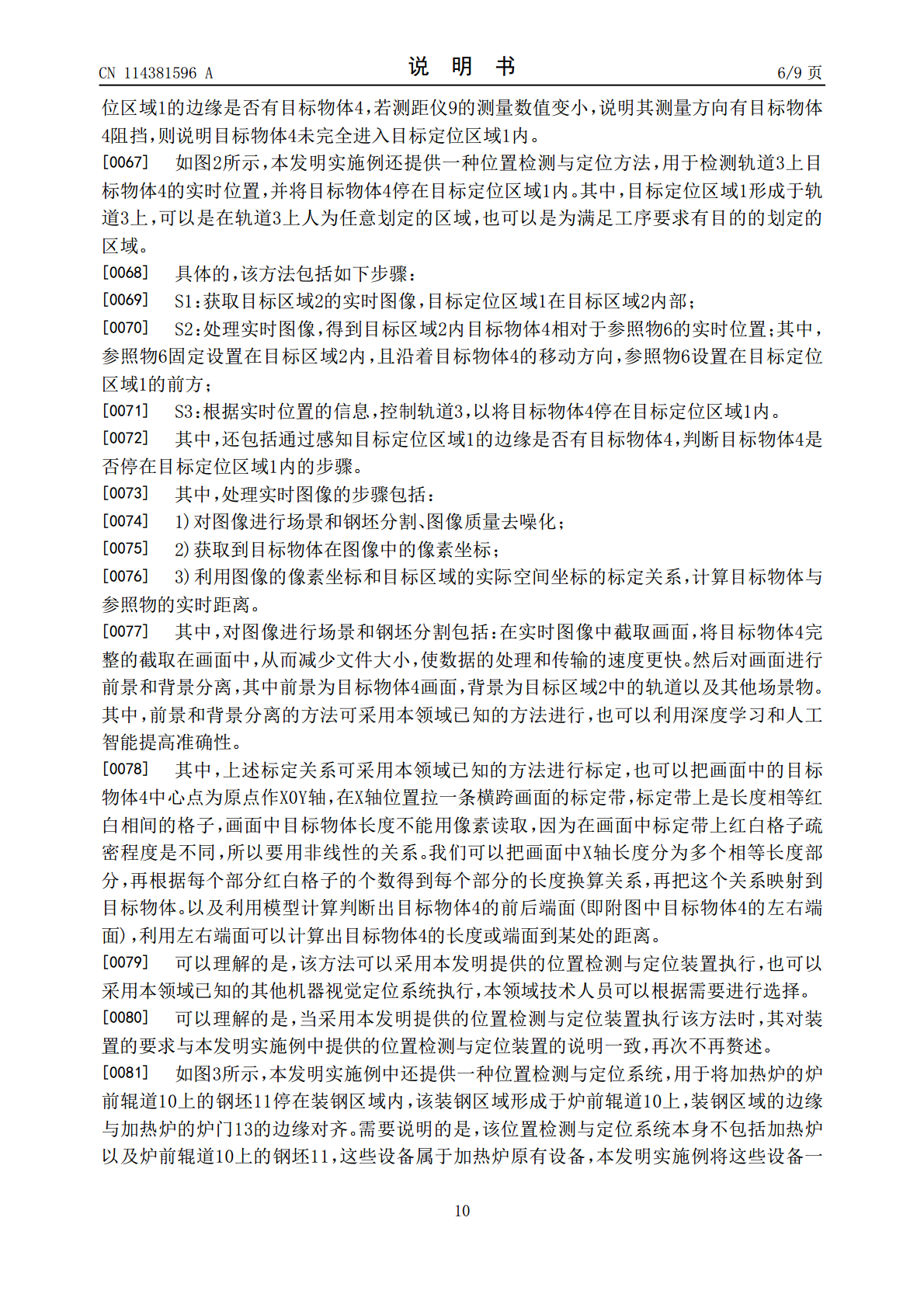
本发明公开了一种位置检测与定位装置、方法及其系统和系统的定位方法,属于自动化控制技术领域,用于检测轨道上目标物体的实时位置并将目标物体停在目标定位区域内,该位置检测与定位装置包括:摄像模块,被配置为获取目标区域的实时图像,其中,目标区域内配置目标定位区域以及位置固定的参照物,参照物沿着目标物体的移动方向设置在目标定位区域的前方;图像处理模块,被配置为接收并处理实时图像,处理后得到目标物体相对于参照物的实时位置,并将实时位置的信息发送给轨道的控制器,使控制器根据实时位置的信息控制轨道,以将目标物体停在目标定
用于人员位置定位的方法、装置和系统.pdf
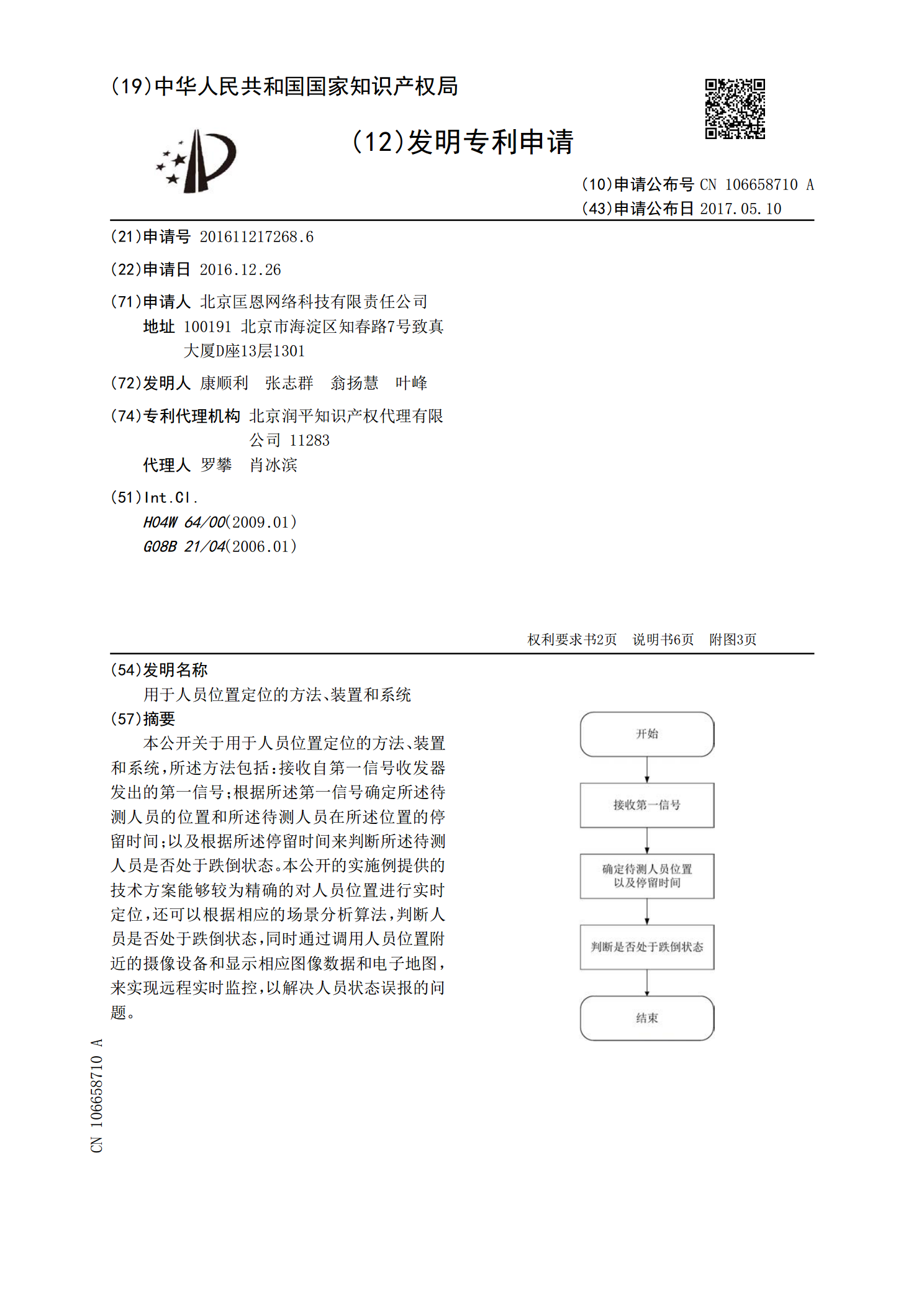
本公开关于用于人员位置定位的方法、装置和系统,所述方法包括:接收自第一信号收发器发出的第一信号;根据所述第一信号确定所述待测人员的位置和所述待测人员在所述位置的停留时间;以及根据所述停留时间来判断所述待测人员是否处于跌倒状态。本公开的实施例提供的技术方案能够较为精确的对人员位置进行实时定位,还可以根据相应的场景分析算法,判断人员是否处于跌倒状态,同时通过调用人员位置附近的摄像设备和显示相应图像数据和电子地图,来实现远程实时监控,以解决人员状态误报的问题。
定位的方法、装置和定位系统.pdf
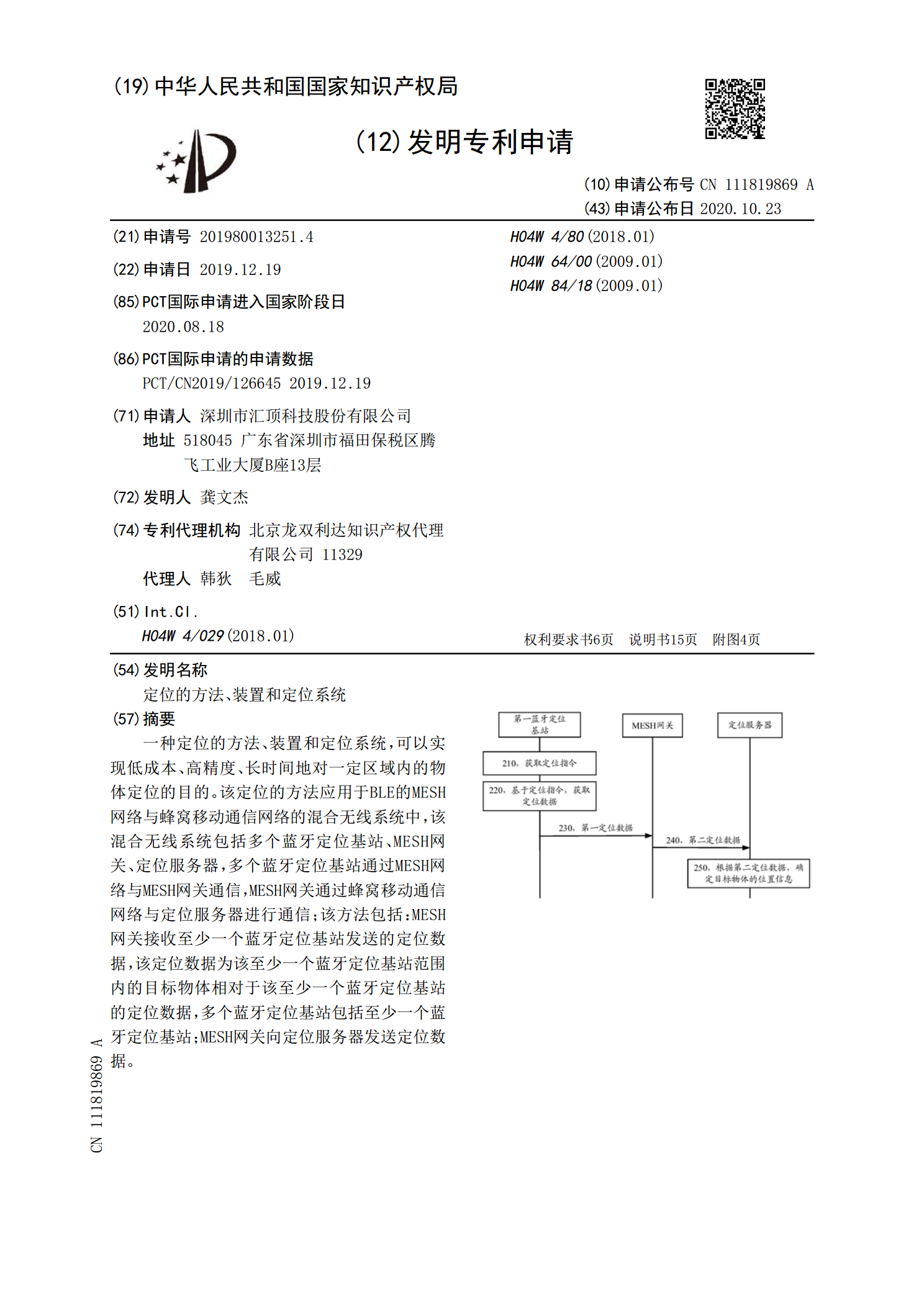
一种定位的方法、装置和定位系统,可以实现低成本、高精度、长时间地对一定区域内的物体定位的目的。该定位的方法应用于BLE的MESH网络与蜂窝移动通信网络的混合无线系统中,该混合无线系统包括多个蓝牙定位基站、MESH网关、定位服务器,多个蓝牙定位基站通过MESH网络与MESH网关通信,MESH网关通过蜂窝移动通信网络与定位服务器进行通信;该方法包括:MESH网关接收至少一个蓝牙定位基站发送的定位数据,该定位数据为该至少一个蓝牙定位基站范围内的目标物体相对于该至少一个蓝牙定位基站的定位数据,多个蓝牙定位基站包括
定位方法、定位装置和测序系统.pdf
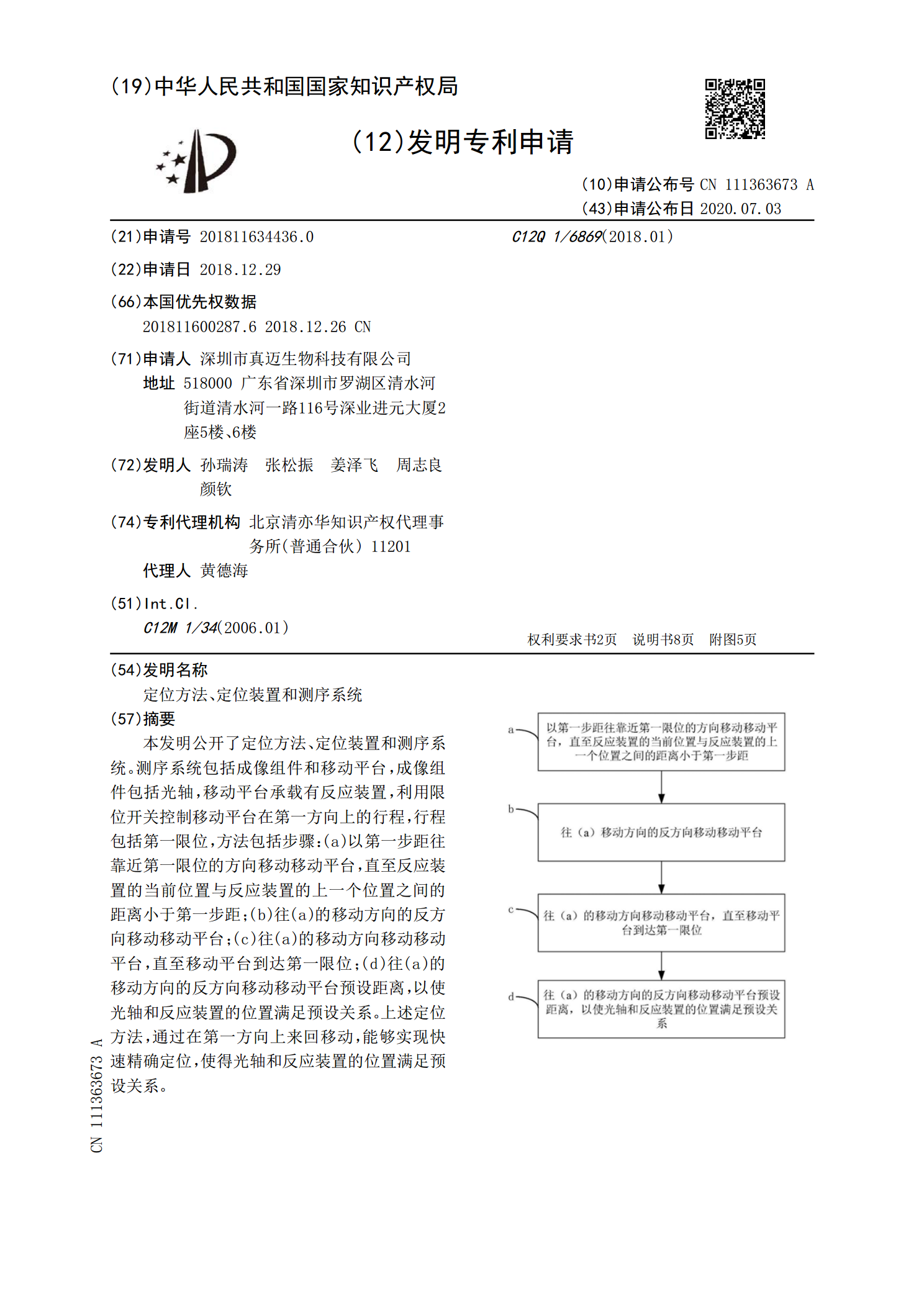
本发明公开了定位方法、定位装置和测序系统。测序系统包括成像组件和移动平台,成像组件包括光轴,移动平台承载有反应装置,利用限位开关控制移动平台在第一方向上的行程,行程包括第一限位,方法包括步骤:(a)以第一步距往靠近第一限位的方向移动移动平台,直至反应装置的当前位置与反应装置的上一个位置之间的距离小于第一步距;(b)往(a)的移动方向的反方向移动移动平台;(c)往(a)的移动方向移动移动平台,直至移动平台到达第一限位;(d)往(a)的移动方向的反方向移动移动平台预设距离,以使光轴和反应装置的位置满足预设关系
定位方法、装置和系统.pdf
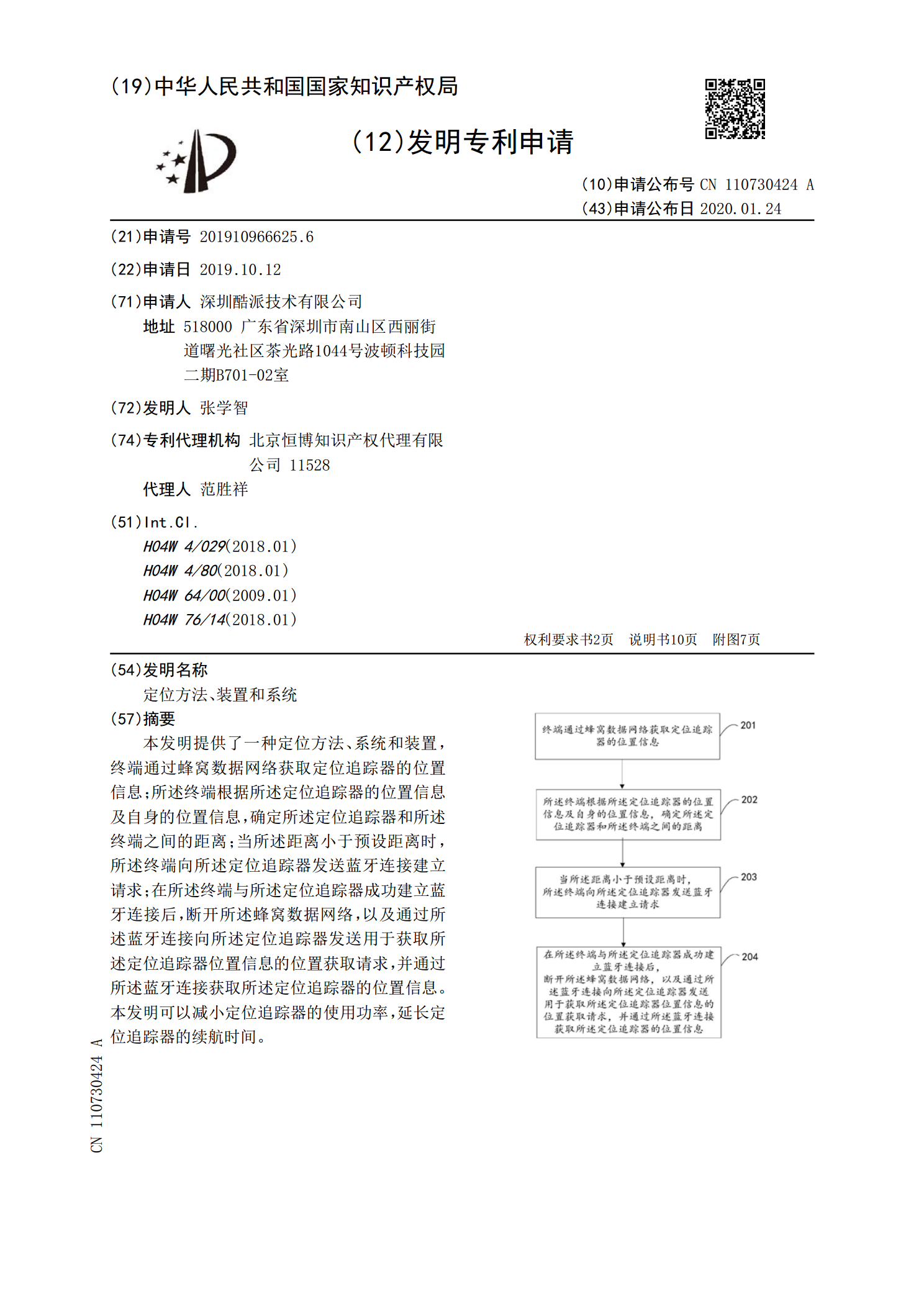
本发明提供了一种定位方法、系统和装置,终端通过蜂窝数据网络获取定位追踪器的位置信息;所述终端根据所述定位追踪器的位置信息及自身的位置信息,确定所述定位追踪器和所述终端之间的距离;当所述距离小于预设距离时,所述终端向所述定位追踪器发送蓝牙连接建立请求;在所述终端与所述定位追踪器成功建立蓝牙连接后,断开所述蜂窝数据网络,以及通过所述蓝牙连接向所述定位追踪器发送用于获取所述定位追踪器位置信息的位置获取请求,并通过所述蓝牙连接获取所述定位追踪器的位置信息。本发明可以减小定位追踪器的使用功率,延长定位追踪器的续航时