
炼铁高炉喷煤速率自动控制方法及装置.pdf

佳晨****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
炼铁高炉喷煤速率自动控制方法及装置.pdf
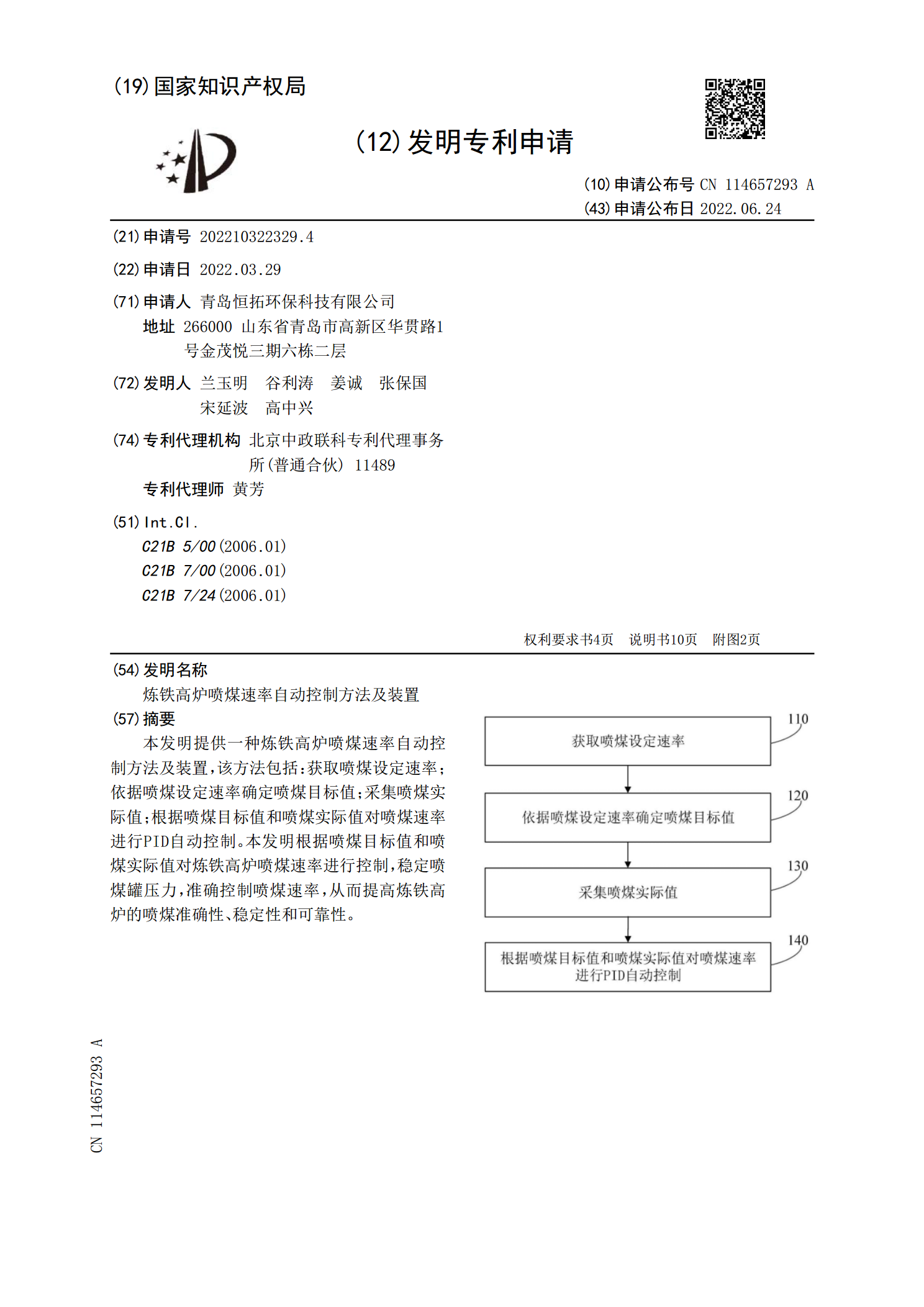
本发明提供一种炼铁高炉喷煤速率自动控制方法及装置,该方法包括:获取喷煤设定速率;依据喷煤设定速率确定喷煤目标值;采集喷煤实际值;根据喷煤目标值和喷煤实际值对喷煤速率进行PID自动控制。本发明根据喷煤目标值和喷煤实际值对炼铁高炉喷煤速率进行控制,稳定喷煤罐压力,准确控制喷煤速率,从而提高炼铁高炉的喷煤准确性、稳定性和可靠性。

一种高炉炼铁喷煤装置和喷煤方法.pdf
本发明涉及高炉炼铁技术领域,尤其涉及一种高炉炼铁喷煤装置,解决了现有技术中的煤粉反吹避免喷枪堵塞的方法,会污染空气的问题,包括煤粉仓、喷吹罐、混合罐、过滤器和分配器,所述煤粉仓的底部开设出料孔,并采用法兰紧密连接有出料管,所述出料管的一端法兰固定在分料管上,所述分料管的下部通过进料管连接设置有喷吹罐,所述喷吹罐的底部开设有排料孔,并法兰紧密连接有排料管,所述排料管的一端法兰固定在输料管上,在抽料泵启动后,混合罐内的煤粉将通过流通管输送至过滤器内,煤粉利用过滤器过滤后,通过连接管输送至分配器内,使经过分配器
高炉喷煤喷吹速率控制方法.pdf
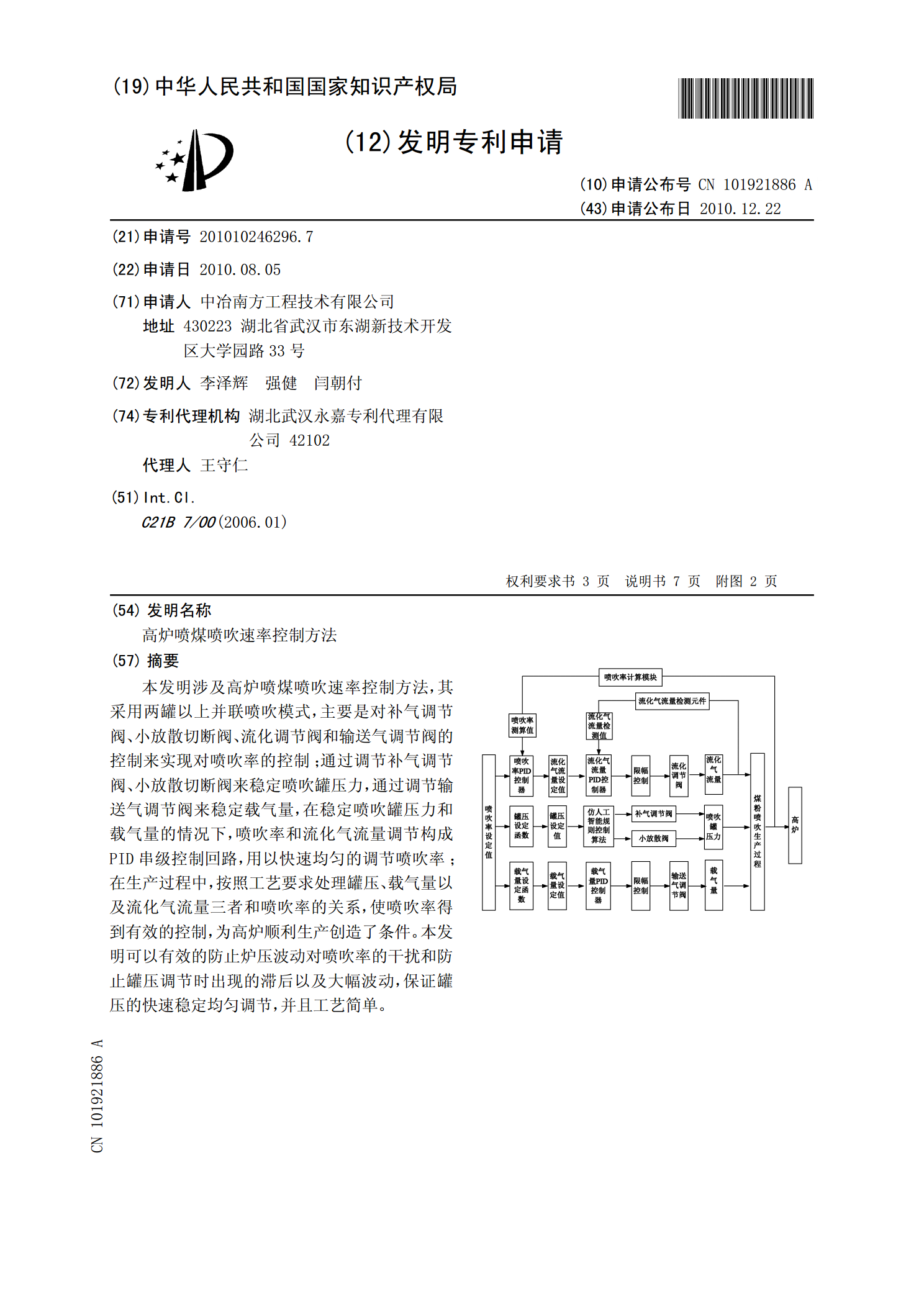
本发明涉及高炉喷煤喷吹速率控制方法,其采用两罐以上并联喷吹模式,主要是对补气调节阀、小放散切断阀、流化调节阀和输送气调节阀的控制来实现对喷吹率的控制;通过调节补气调节阀、小放散切断阀来稳定喷吹罐压力,通过调节输送气调节阀来稳定载气量,在稳定喷吹罐压力和载气量的情况下,喷吹率和流化气流量调节构成PID串级控制回路,用以快速均匀的调节喷吹率;在生产过程中,按照工艺要求处理罐压、载气量以及流化气流量三者和喷吹率的关系,使喷吹率得到有效的控制,为高炉顺利生产创造了条件。本发明可以有效的防止炉压波动对喷吹率的干扰和
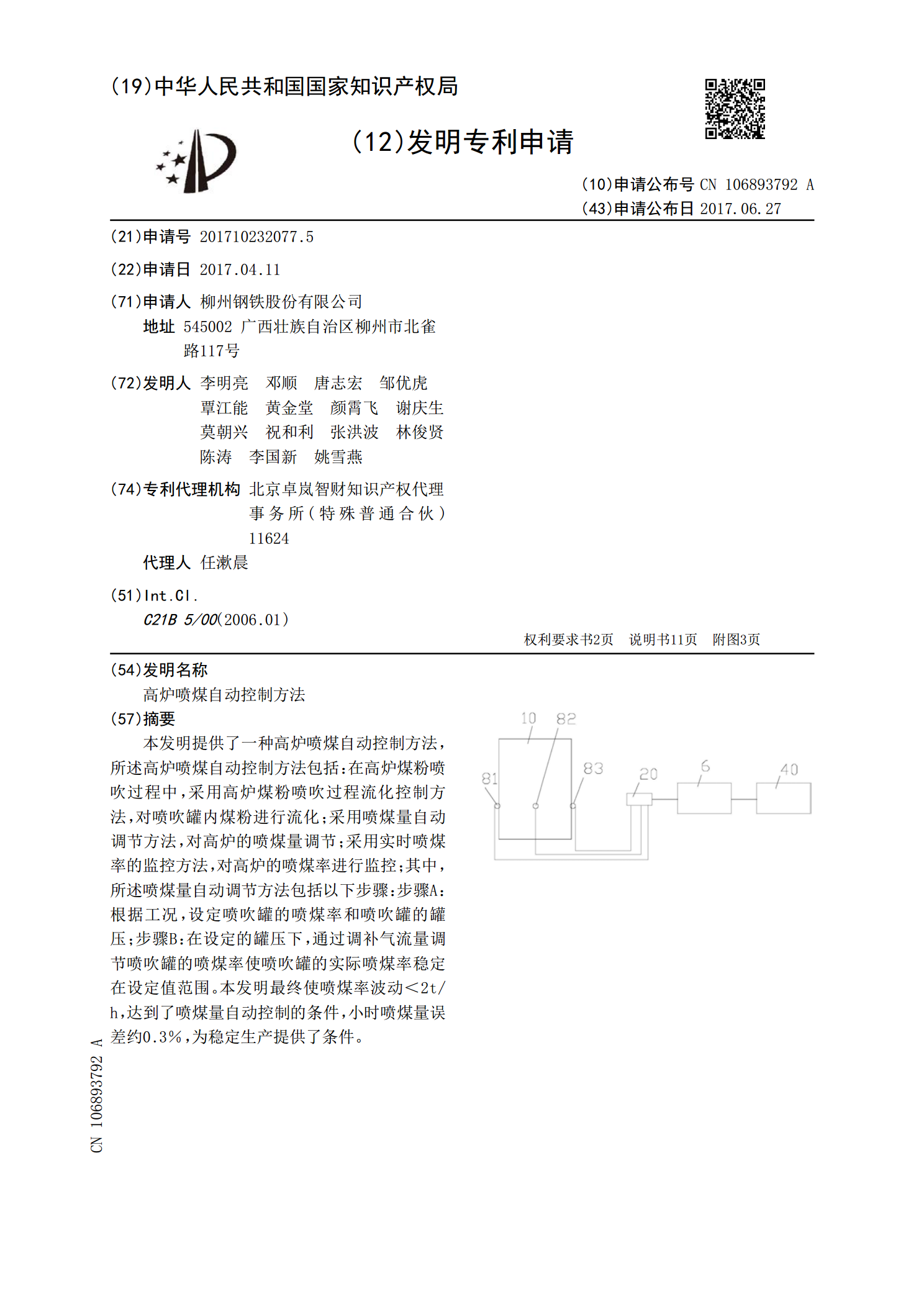
高炉喷煤自动控制方法.pdf
本发明提供了一种高炉喷煤自动控制方法,所述高炉喷煤自动控制方法包括:在高炉煤粉喷吹过程中,采用高炉煤粉喷吹过程流化控制方法,对喷吹罐内煤粉进行流化;采用喷煤量自动调节方法,对高炉的喷煤量调节;采用实时喷煤率的监控方法,对高炉的喷煤率进行监控;其中,所述喷煤量自动调节方法包括以下步骤:步骤A:根据工况,设定喷吹罐的喷煤率和喷吹罐的罐压;步骤B:在设定的罐压下,通过调补气流量调节喷吹罐的喷煤率使喷吹罐的实际喷煤率稳定在设定值范围。本发明最终使喷煤率波动<2t/h,达到了喷煤量自动控制的条件,小时喷煤量误差约0
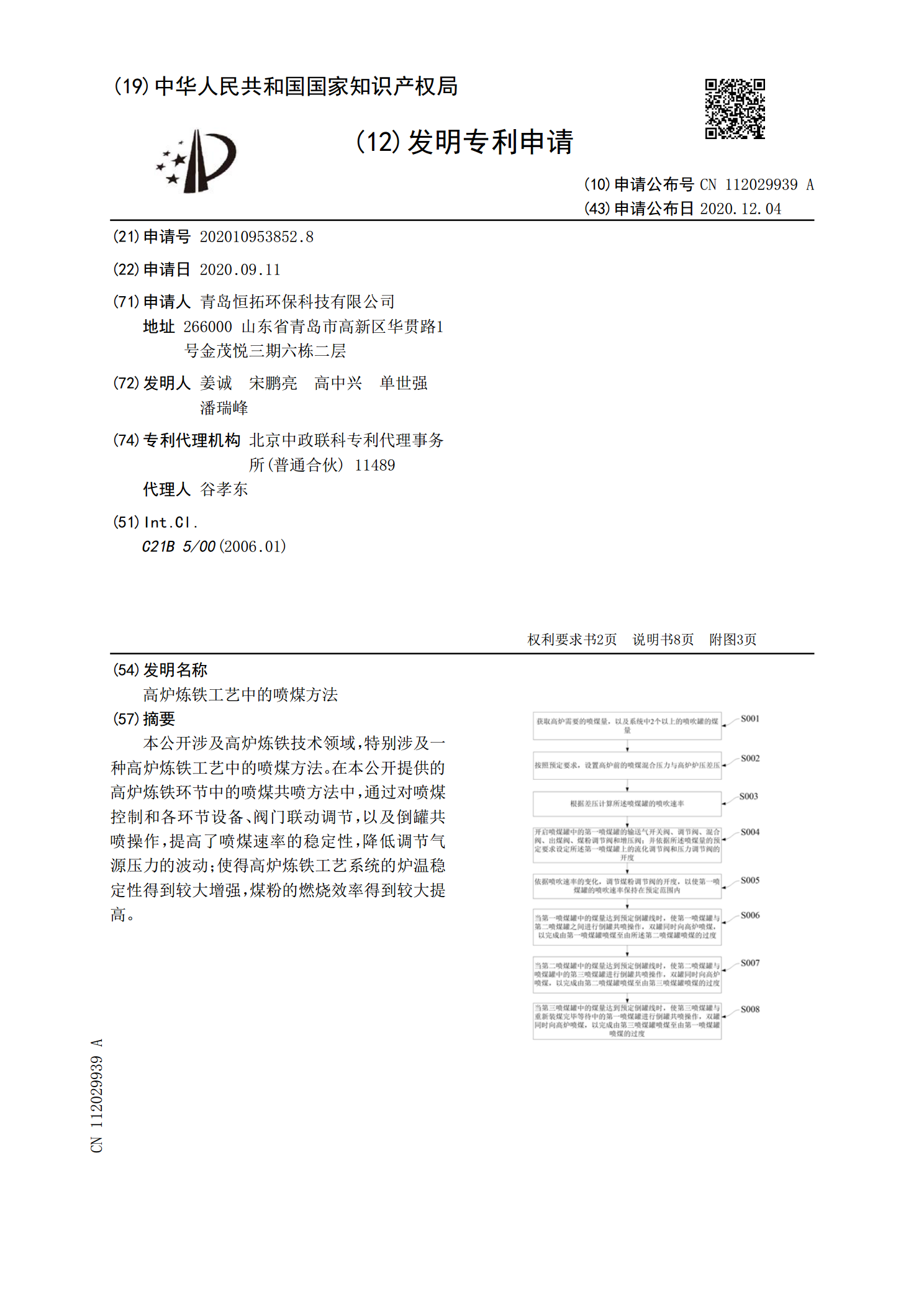
高炉炼铁工艺中的喷煤方法.pdf
本公开涉及高炉炼铁技术领域,特别涉及一种高炉炼铁工艺中的喷煤方法。在本公开提供的高炉炼铁环节中的喷煤共喷方法中,通过对喷煤控制和各环节设备、阀门联动调节,以及倒罐共喷操作,提高了喷煤速率的稳定性,降低调节气源压力的波动;使得高炉炼铁工艺系统的炉温稳定性得到较大增强,煤粉的燃烧效率得到较大提高。