
一种转炉空炉重心位置及质量的在线测量方法.pdf

听云****君哇

1/9
2/9

3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种转炉空炉重心位置及质量的在线测量方法.pdf
本发明涉及一种转炉空炉重心位置及质量的在线测量方法,所述测量方法包括以下步骤一:建立起包含转炉倾动电动机、减速机、炉体三者之间的动力学关系,并以方程形式体现;步骤二、依据所建立的方程推导出空炉重心位置和质量的测量方法;测量方法在炼钢过程中倒渣后的空炉阶段进行,通过自动操控空炉的归位、在特定的炉体倾角区段进行匀速运行和加速运行等实验来实现。本发明提出空炉的重心和质量测量方法可实现在线测量,实时感知炉衬状态,实时感知炉衬状态变化的趋势。空炉的重心和质量的在线测量不仅有利于及时把控转炉炼钢运行状态和提高转炉倾动

一种重心位置测量方法及系统.pdf
本发明属于超精密主动减振相关技术领域,其公开了一种重心位置的测量方法。所述方法采用重心测量系统实现,该重心测量系统包括控制器和两个以上的主动减振器,每个所述主动减振器配合有执行器及传感器,所述主动减振器用于支撑负载,并在各主动减振器处形成支撑点,该测量方法包括:S1启动重心测量系统,控制器调整各执行器的出力幅值,使得负载只存在重力方向的响应;S2根据各执行器出力幅值及相邻支撑点间的距离计算获得所述负载的重心位置。本发明还公开了一种对应的测量系统。本发明的测量方法,实现了精密主动减振器负载重心的快速识别,并
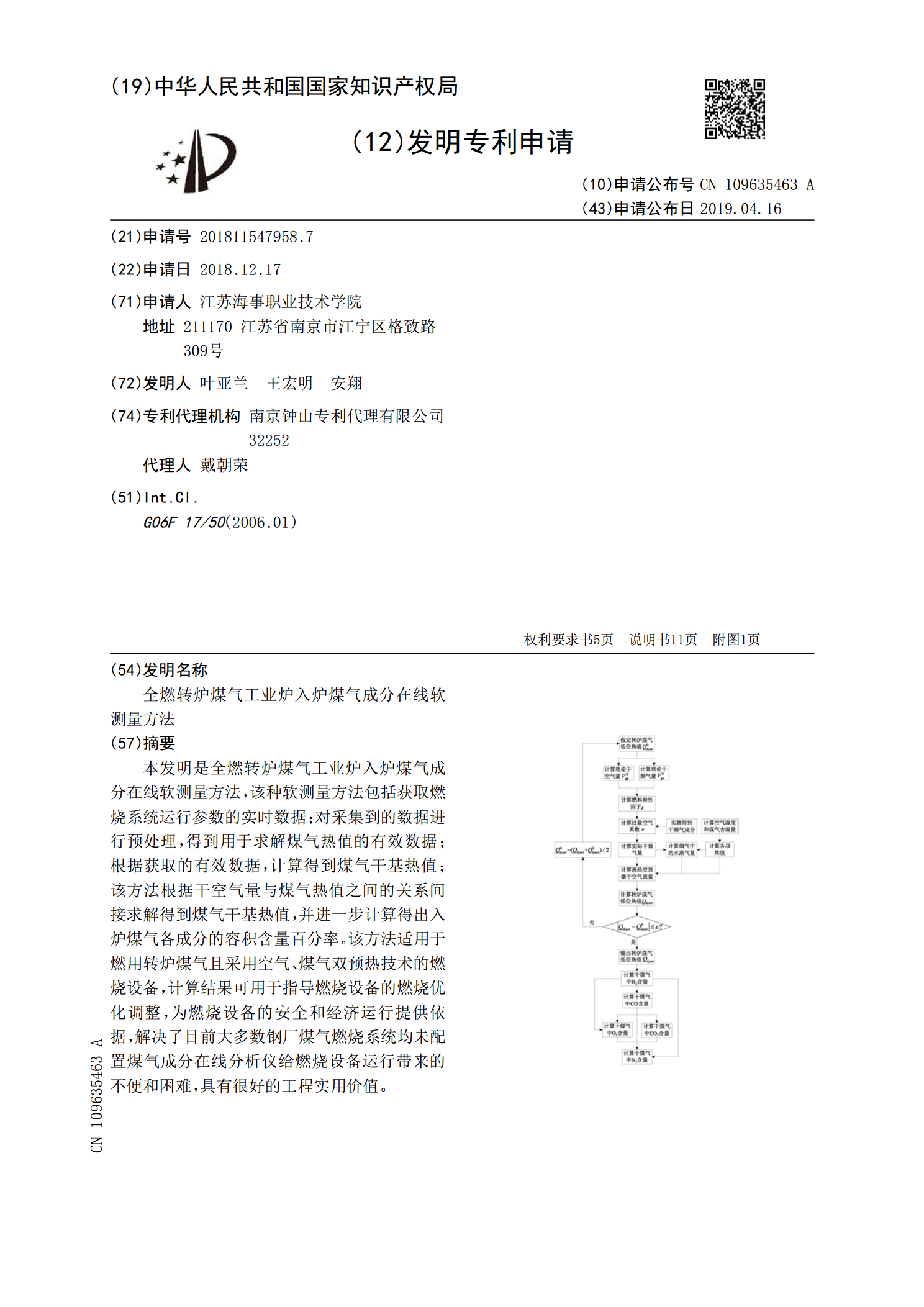
全燃转炉煤气工业炉入炉煤气成分在线软测量方法.pdf
本发明是全燃转炉煤气工业炉入炉煤气成分在线软测量方法,该种软测量方法包括获取燃烧系统运行参数的实时数据;对采集到的数据进行预处理,得到用于求解煤气热值的有效数据;根据获取的有效数据,计算得到煤气干基热值;该方法根据干空气量与煤气热值之间的关系间接求解得到煤气干基热值,并进一步计算得出入炉煤气各成分的容积含量百分率。该方法适用于燃用转炉煤气且采用空气、煤气双预热技术的燃烧设备,计算结果可用于指导燃烧设备的燃烧优化调整,为燃烧设备的安全和经济运行提供依据,解决了目前大多数钢厂煤气燃烧系统均未配置煤气成分在线分
一种氧气顶吹转炉炉底的在线维护方法.pdf
本发明公开了一种氧气顶吹转炉炉底的在线维护方法,其特征在于:它包括以下步骤完成:在氧气顶吹转炉出钢完毕后,将转炉摇至加原料位置;同时加入生铁和耐火砖;摇正炉体,静止3—5分钟,生铁熔融,使加入的耐火砖铺设在炉底;下氧枪,吹入高压氮气进行溅渣护炉操作,使耐火砖粘结在炉底;前、后摇晃炉体,使炉渣粘附在耐火砖的表面;摇炉至倒渣位置进行倒渣操作;进入下一个冶炼周期。本发明克服了传统的转炉炉底维护方法必须停机进行维护的弊端,维护周期延长了三倍。
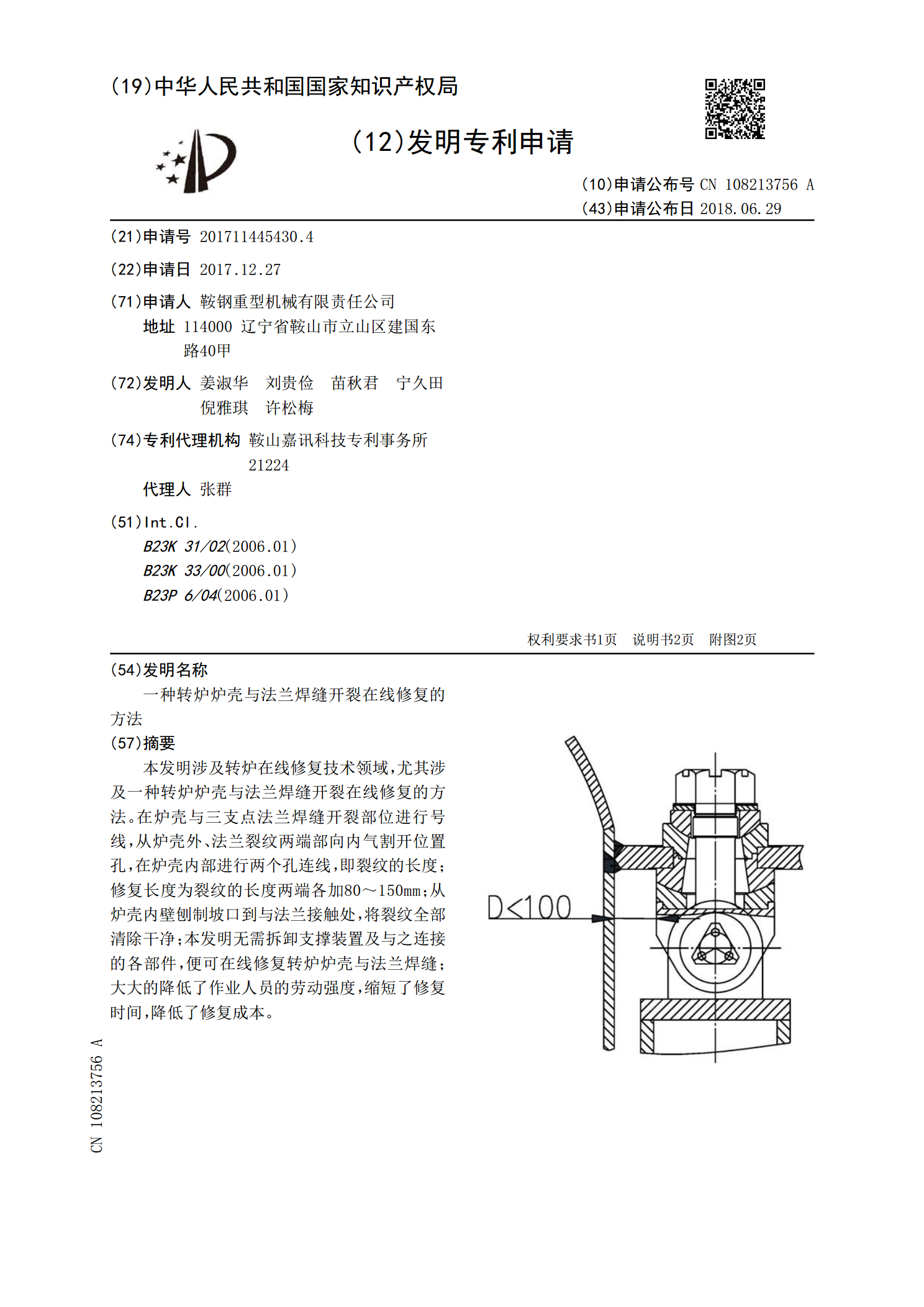
一种转炉炉壳与法兰焊缝开裂在线修复的方法.pdf
本发明涉及转炉在线修复技术领域,尤其涉及一种转炉炉壳与法兰焊缝开裂在线修复的方法。在炉壳与三支点法兰焊缝开裂部位进行号线,从炉壳外、法兰裂纹两端部向内气割开位置孔,在炉壳内部进行两个孔连线,即裂纹的长度;修复长度为裂纹的长度两端各加80~150mm;从炉壳内壁刨制坡口到与法兰接触处,将裂纹全部清除干净;本发明无需拆卸支撑装置及与之连接的各部件,便可在线修复转炉炉壳与法兰焊缝;大大的降低了作业人员的劳动强度,缩短了修复时间,降低了修复成本。