
一种转底炉的高温出料螺旋叶片厚度磨损检测系统及方法.pdf

一吃****天材

1/10
2/10
3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种转底炉的高温出料螺旋叶片厚度磨损检测系统及方法.pdf
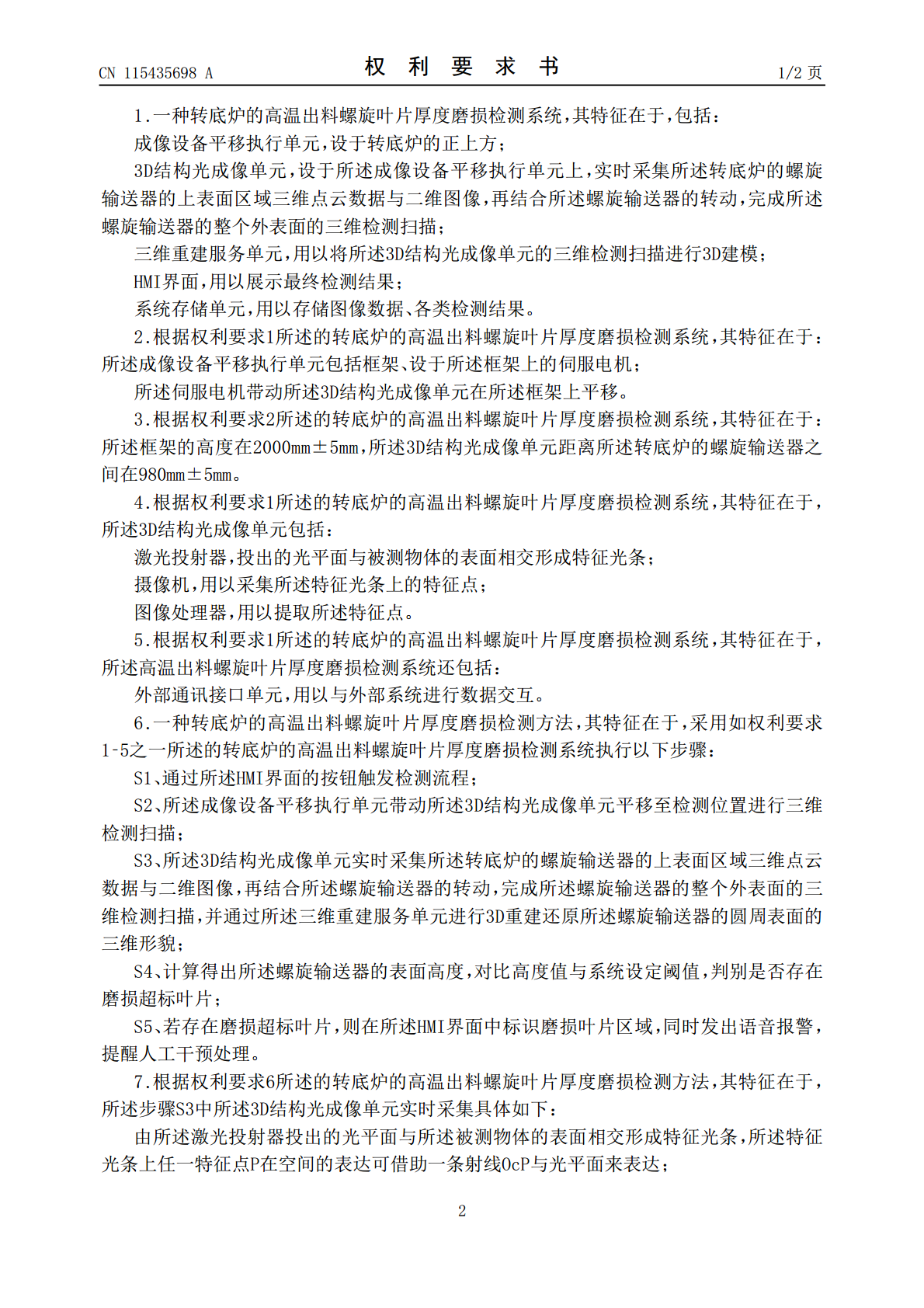
本发明公开了一种转底炉的高温出料螺旋叶片厚度磨损检测系统及方法,包括:成像设备平移执行单元,设于转底炉的正上方;3D结构光成像单元,设于所述成像设备平移执行单元上,实时采集所述转底炉的螺旋输送器的上表面区域三维点云数据与二维图像,再结合所述螺旋输送器的转动,完成所述螺旋输送器的整个外表面的三维检测扫描;三维重建服务单元,用以将所述3D结构光成像单元的三维检测扫描进行3D建模;HMI界面,用以展示最终检测结果;系统存储单元,用以存储数据、检测结果。本发明不需要人工接触叶片表面,在一定的高温情况下,实施在线检

转底炉螺旋出料机用耐高温螺旋叶片及出料装置和出料机.pdf
本发明公开了一种转底炉螺旋出料机用耐高温螺旋叶片及出料装置和出料机,在耐高温螺旋叶片与螺旋轴之间增设基座,并采用螺栓连接的方式将耐高温螺旋叶片固定在螺旋轴上,同时耐高温螺旋叶片在叶片基体顶部的工作层设置高温耐磨层,本发明不仅能解决螺旋叶片更换操作繁琐及其更换繁琐导致螺旋轴损坏的问题,还能解决螺旋叶片在高温工况下磨损严重、使用寿命短、备件成本高等问题。
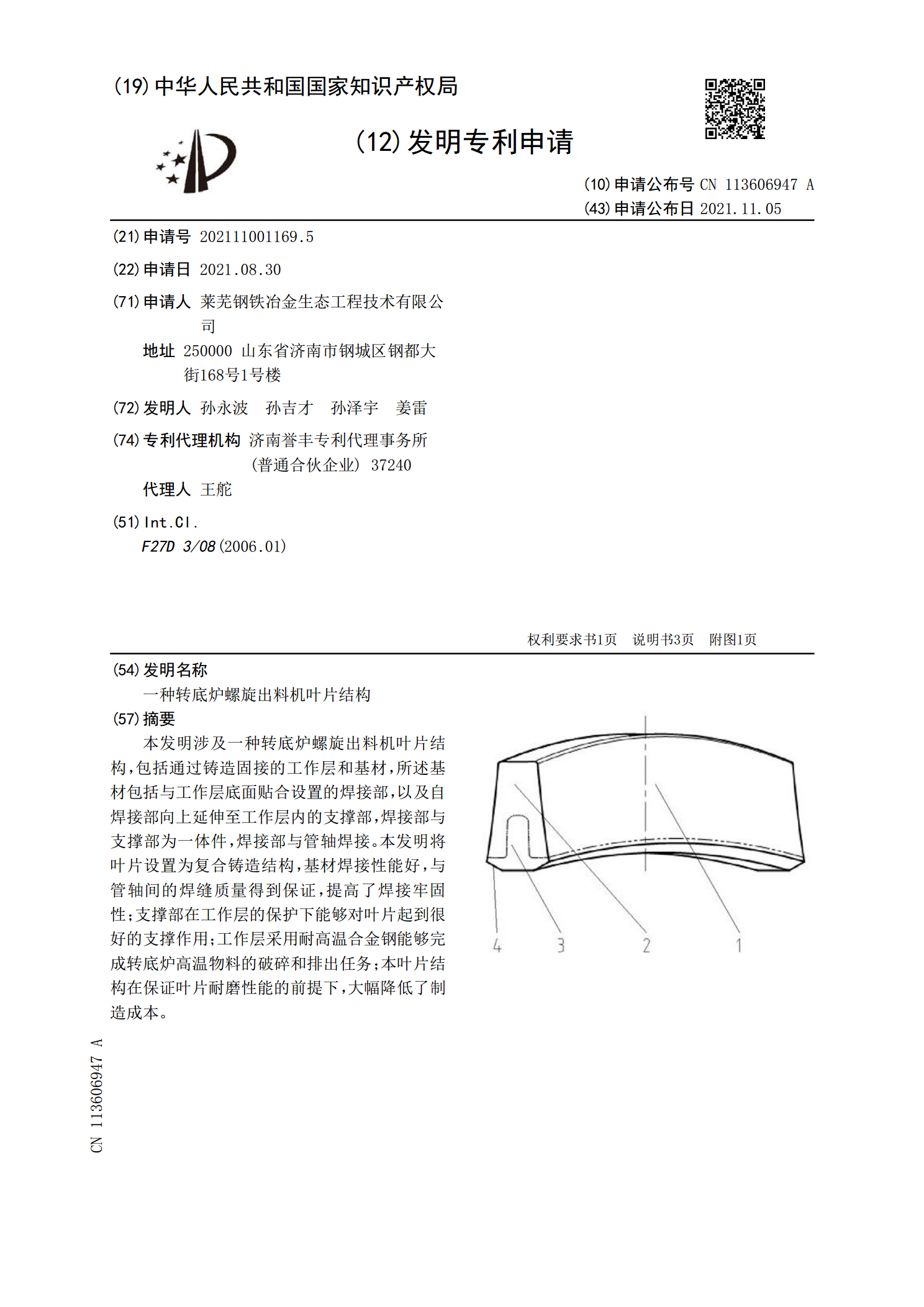
一种转底炉螺旋出料机叶片结构.pdf
本发明涉及一种转底炉螺旋出料机叶片结构,包括通过铸造固接的工作层和基材,所述基材包括与工作层底面贴合设置的焊接部,以及自焊接部向上延伸至工作层内的支撑部,焊接部与支撑部为一体件,焊接部与管轴焊接。本发明将叶片设置为复合铸造结构,基材焊接性能好,与管轴间的焊缝质量得到保证,提高了焊接牢固性;支撑部在工作层的保护下能够对叶片起到很好的支撑作用;工作层采用耐高温合金钢能够完成转底炉高温物料的破碎和排出任务;本叶片结构在保证叶片耐磨性能的前提下,大幅降低了制造成本。
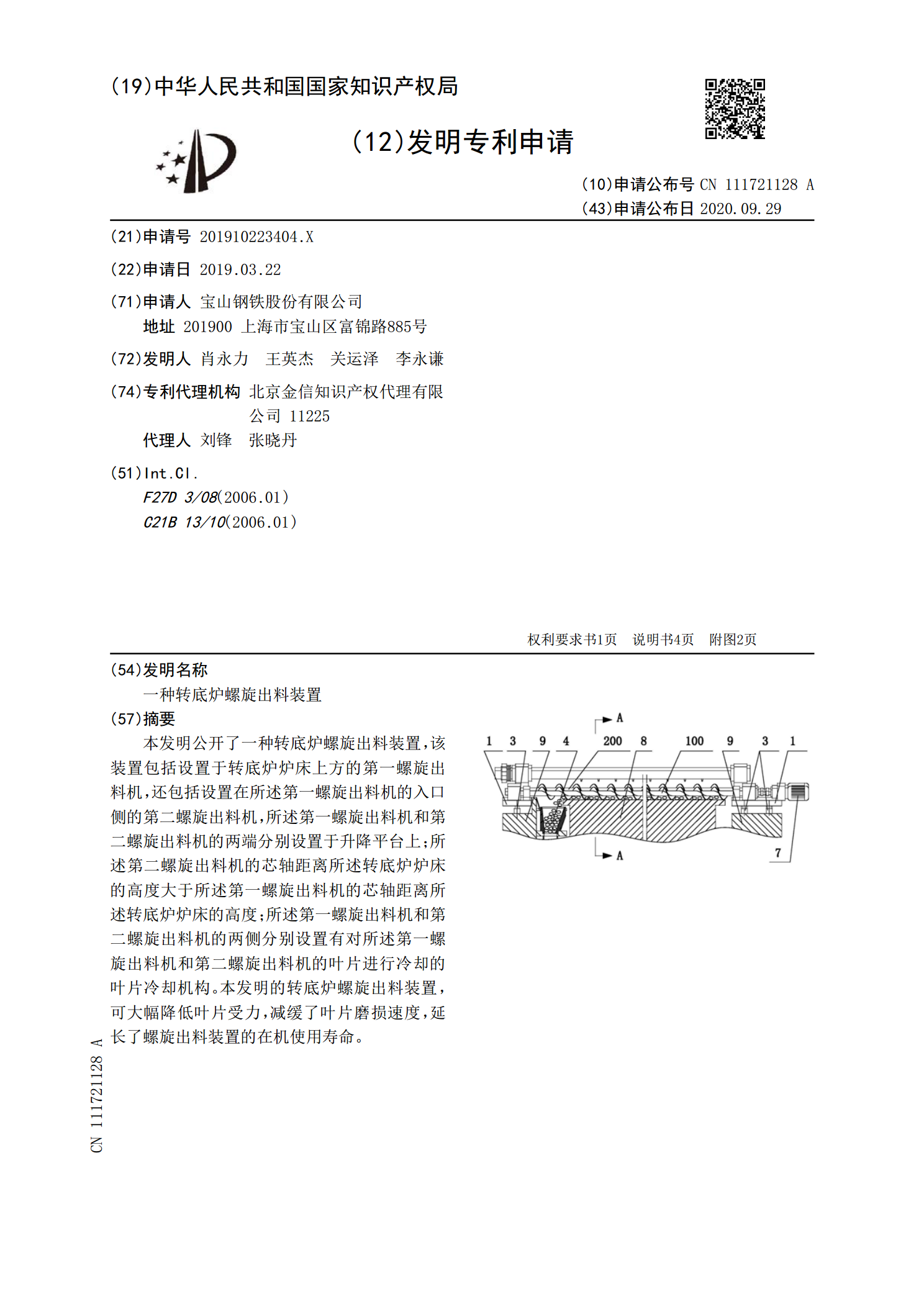
一种转底炉螺旋出料装置.pdf
本发明公开了一种转底炉螺旋出料装置,该装置包括设置于转底炉炉床上方的第一螺旋出料机,还包括设置在所述第一螺旋出料机的入口侧的第二螺旋出料机,所述第一螺旋出料机和第二螺旋出料机的两端分别设置于升降平台上;所述第二螺旋出料机的芯轴距离所述转底炉炉床的高度大于所述第一螺旋出料机的芯轴距离所述转底炉炉床的高度;所述第一螺旋出料机和第二螺旋出料机的两侧分别设置有对所述第一螺旋出料机和第二螺旋出料机的叶片进行冷却的叶片冷却机构。本发明的转底炉螺旋出料装置,可大幅降低叶片受力,减缓了叶片磨损速度,延长了螺旋出料装置的在

一种转底炉炉内高温球团料层厚度检测装置.pdf
本发明公开一种转底炉炉内高温球团料层厚度检测装置,目的在于解决解决炉底料层厚度过高影响生产效率的问题,其包括转底炉炉墙、工业相机、外保护套筒、气动进退装置、电控柜、气源箱、控制器以及人机接口,所述外保护套筒、工业相机以及电控柜分别与所述气源箱连接;所述工业相机、控制器分别与所述电控柜连接。本发明通过气动进退装置控制工业相机在外保护套筒来实时监控到炉底料层厚度变化,解决可溶化的高温球团使炉底料层厚度升高导致整个生产过程中断的问题,同时能够有效减少停机时间,减少物料及能源的浪费,提高生产作业率、预防事故、达到