
一种机器人焊接生产用旋转运输装置及其使用方法.pdf

是你****深呀


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人焊接生产用旋转运输装置及其使用方法.pdf
本发明涉及机器人焊接生产技术领域,尤其为一种机器人焊接生产用旋转运输装置及其使用方法,包括底座、定位装置、旋转装置和限位装置,所述底座顶端设有定位装置,所述定位装置包括限位块、定位架、弹簧、内杆、第一螺纹轴、把手和卡勾,所述底座顶端滑动连接有限位块,本发明中,通过设置的第二螺纹轴和滑动杆,这种设置配合齿轮与齿环的啮合连接、滑动杆与固定杆的滑动连接和第二螺纹轴与滑动杆的螺旋连接,把装置移动到左高右低的两个输送机构垂直处时,通过第一电机带动第二螺纹轴顺时针转动,在装置完成旋转操作后,可以把右侧输送来的焊接件升

一种机器人焊接生产用多向旋转加工装置及其使用方法.pdf
本发明涉及机器人焊接技术领域,尤其为一种机器人焊接生产用多向旋转加工装置及其使用方法,包括底座、支撑架、连接装置、上料装置和定位装置,所述底座右端设有连接装置,所述连接装置包括定位架,所述定位架右端滑动连接有定位架,所述定位架内侧固定连接有螺栓,本发明中,通过设置的第一定位块和压力传感器,这种设置配合第一定位块与支撑杆的固定连接、第三弹簧对压板及推板的弹力、压力传感器与压板及支撑杆的固定连接和第二电动伸缩杆与推板的固定连接,对圆环状的焊接件进行焊接时,在控制器的控制下,可以根据夹紧力的要求对不同材质的圆环
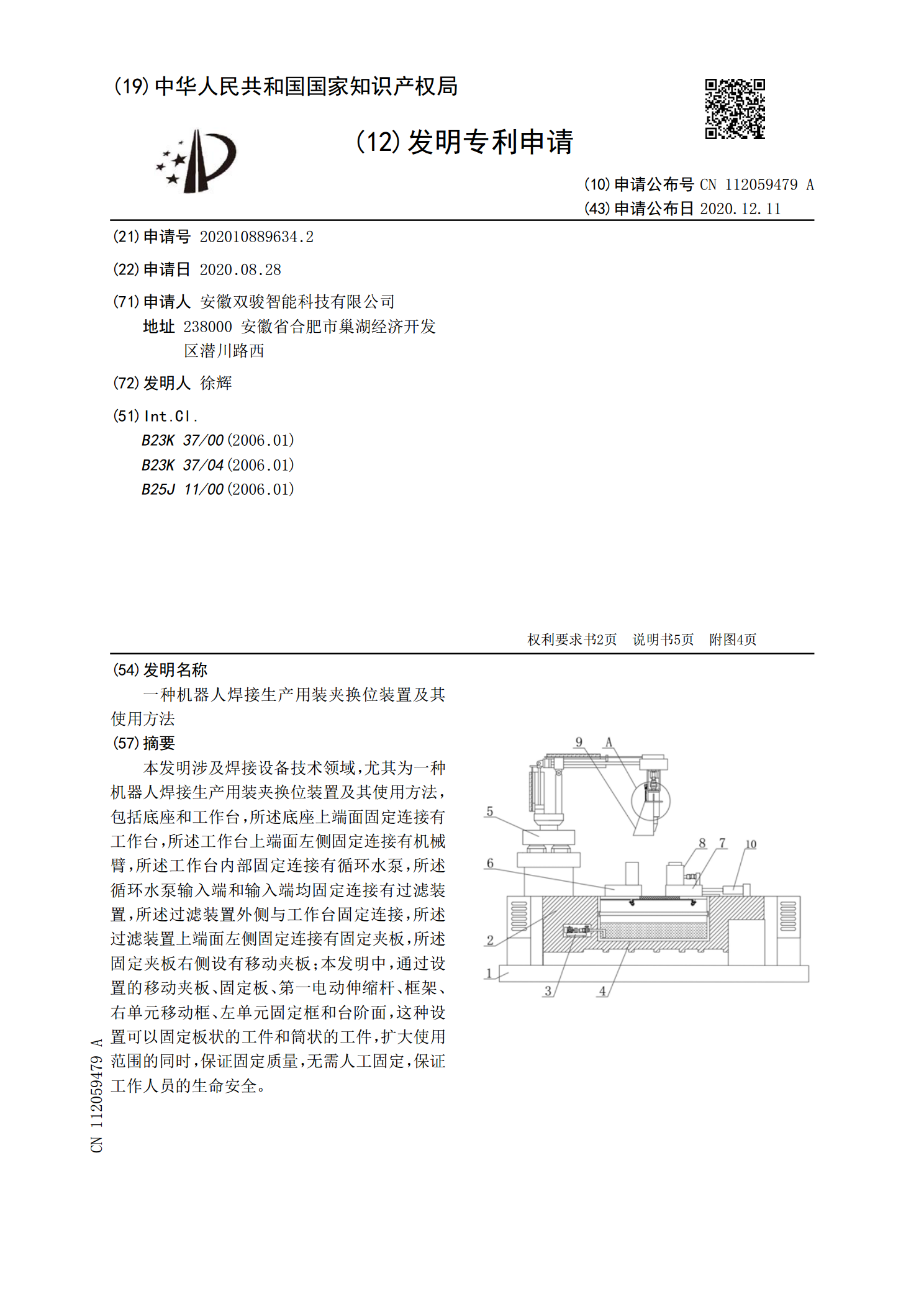
一种机器人焊接生产用装夹换位装置及其使用方法.pdf
本发明涉及焊接设备技术领域,尤其为一种机器人焊接生产用装夹换位装置及其使用方法,包括底座和工作台,所述底座上端面固定连接有工作台,所述工作台上端面左侧固定连接有机械臂,所述工作台内部固定连接有循环水泵,所述循环水泵输入端和输入端均固定连接有过滤装置,所述过滤装置外侧与工作台固定连接,所述过滤装置上端面左侧固定连接有固定夹板,所述固定夹板右侧设有移动夹板;本发明中,通过设置的移动夹板、固定板、第一电动伸缩杆、框架、右单元移动框、左单元固定框和台阶面,这种设置可以固定板状的工件和筒状的工件,扩大使用范围的同时

一种机器人焊接生产用粉尘预清理除装置及其使用方法.pdf
本发明涉及焊接技术领域,尤其为一种机器人焊接生产用粉尘预清理除装置及其使用方法,包括清除壳和车轮,所述清除壳下端面左右两侧均固定连接有车轮,所述清除壳上端面固定连接有呈左右分布的推动杆和水箱,所述水箱左侧连通有水管,所述水管另一端固定连接有喷头,所述水管外侧固定连接有阀门,所述水管外侧与清除壳固定连接,所述清除壳内部右侧固定连接有清除装置;本发明中,通过设置的清除电机、主动齿轮、连接杆、从动齿轮、固定板和刮刀,通过清除电机启动带动主动齿轮转动,从而使从动齿轮转动,进而使刮刀转动,从而对焊接平台表面的焊接残

一种焊接机器人焊接用焊条供给装置及其使用方法.pdf
本发明公开了一种焊接机器人焊接用焊条供给装置及其使用方法,包括箱体,所述箱体的上部一体连接有储料仓,所述箱体的内部与储料仓之间设有隔板,所述储料仓的内部底部侧面设有干燥机构,所述干燥机构包括有隔网、支杆、吹风管、喇叭头、干燥箱、干燥电机、主动锥齿、固定架、加热丝、扇叶和从动锥齿。本发明所述的一种焊接机器人焊接用焊条供给装置,具有干燥焊条的功能,同时也提高了焊条供给装置的功能性,其次能够方便将堆叠的焊条分拨成一根一根独立的焊条,有利于输送,此外,能够将焊条一根一根独立输送到接料槽内,使得焊条保持固定的方向和