
一种激光测距装置.pdf

白凡****12

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种激光测距的方法和激光测距装置.pdf
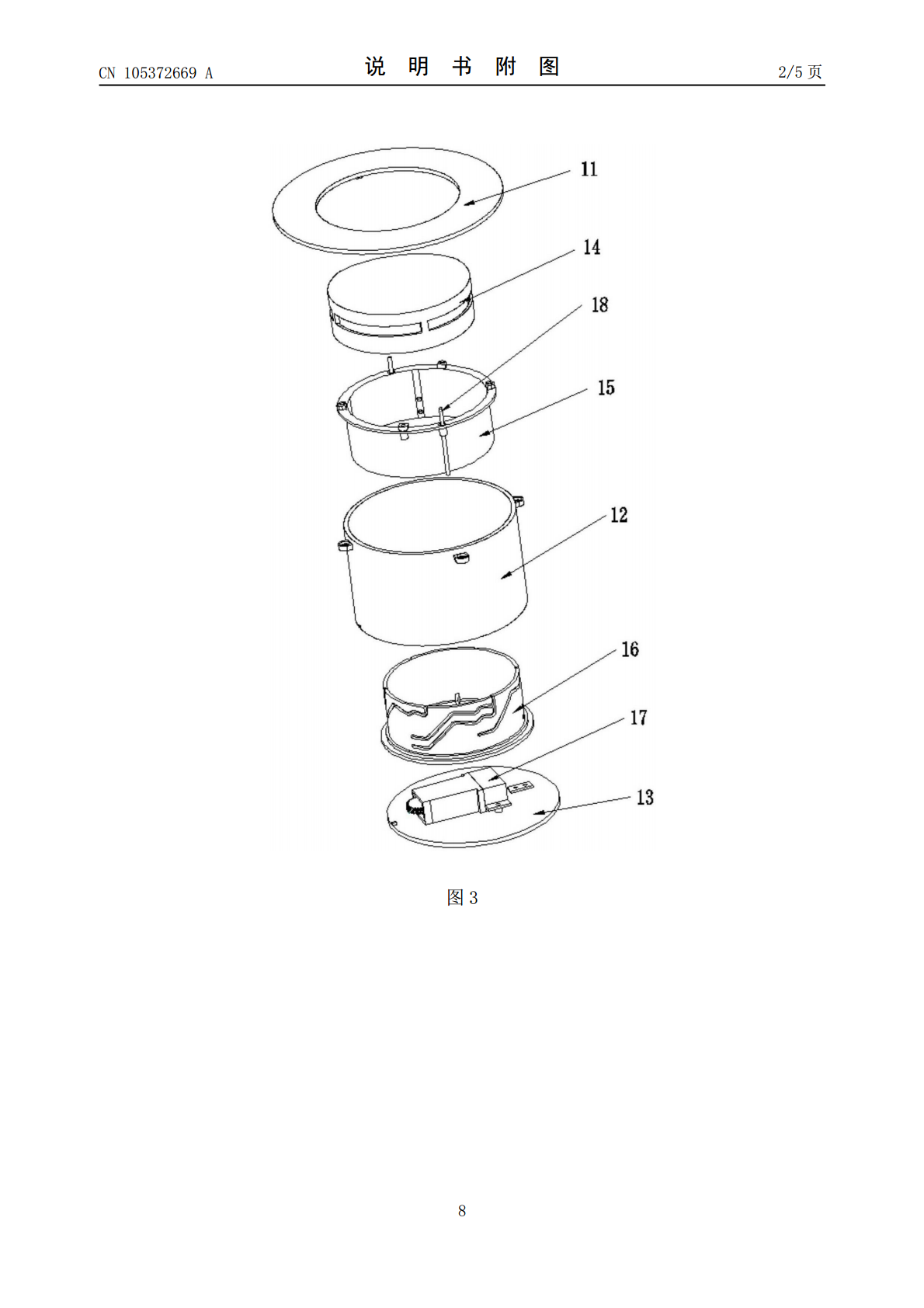
本发明公开了一种激光测距的方法和激光测距装置,所述方法包括:将反射镜设置在工件的待安装位置内;通过反射镜,将上方激光打到下方激光的接收点,并获得上方激光和下方激光的夹角、上方激光传感器与反射镜的距离、下方激光传感器与反射镜的距离;安装工件后,获得上方激光检测值和下方激光检测值;获得工件的检测当量;根据检测当量获得工件的偏移量。反射镜的反射点、上方激光打到下方激光在同一平面内,并经过工件,利于对工件进行测量和计算;根据两个方向的数据计算检测当量,使检测当量反应了两个方向的数据,使检测当量能够反应工作的整体偏
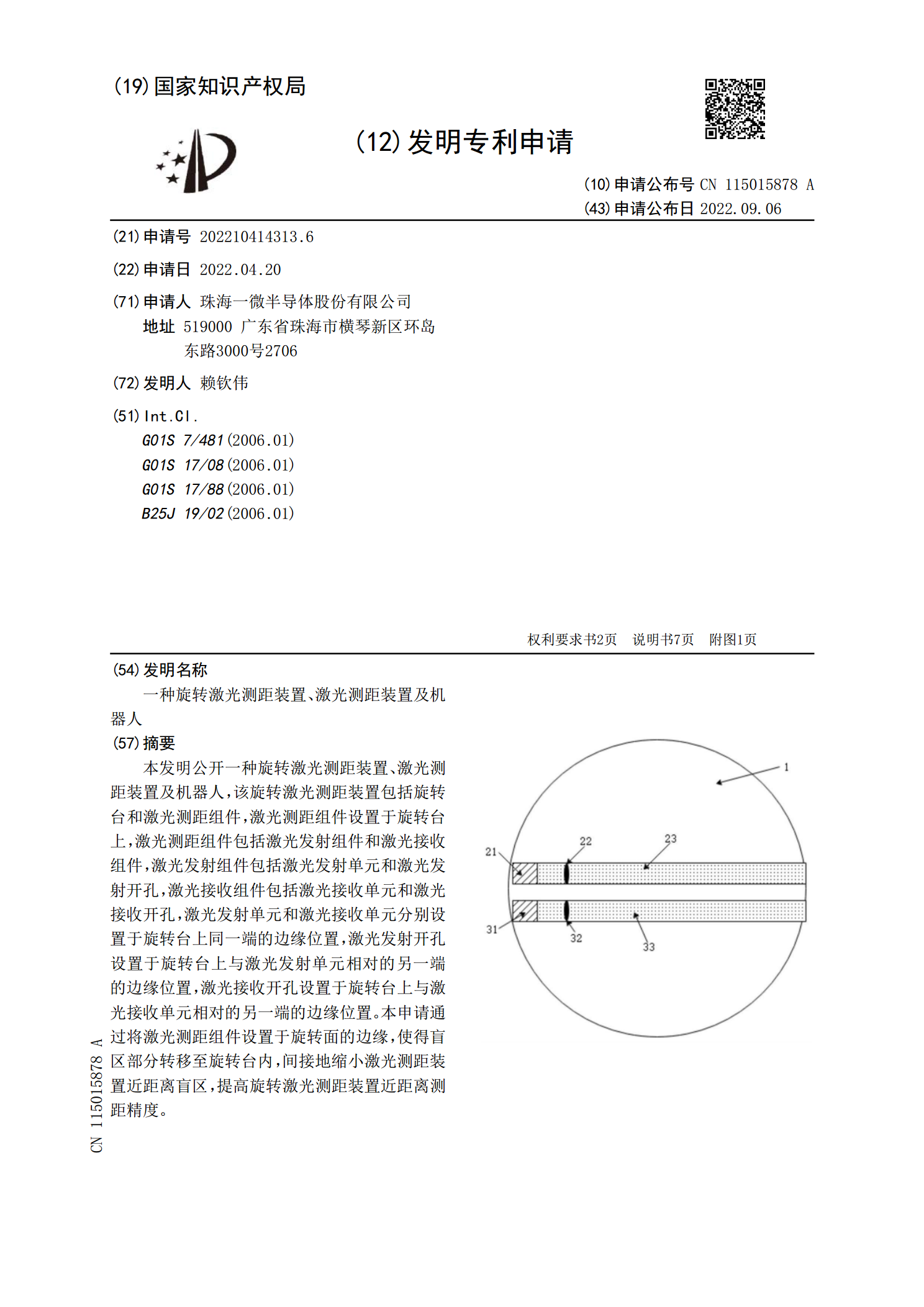
一种旋转激光测距装置、激光测距装置及机器人.pdf
本发明公开一种旋转激光测距装置、激光测距装置及机器人,该旋转激光测距装置包括旋转台和激光测距组件,激光测距组件设置于旋转台上,激光测距组件包括激光发射组件和激光接收组件,激光发射组件包括激光发射单元和激光发射开孔,激光接收组件包括激光接收单元和激光接收开孔,激光发射单元和激光接收单元分别设置于旋转台上同一端的边缘位置,激光发射开孔设置于旋转台上与激光发射单元相对的另一端的边缘位置,激光接收开孔设置于旋转台上与激光接收单元相对的另一端的边缘位置。本申请通过将激光测距组件设置于旋转面的边缘,使得盲区部分转移至
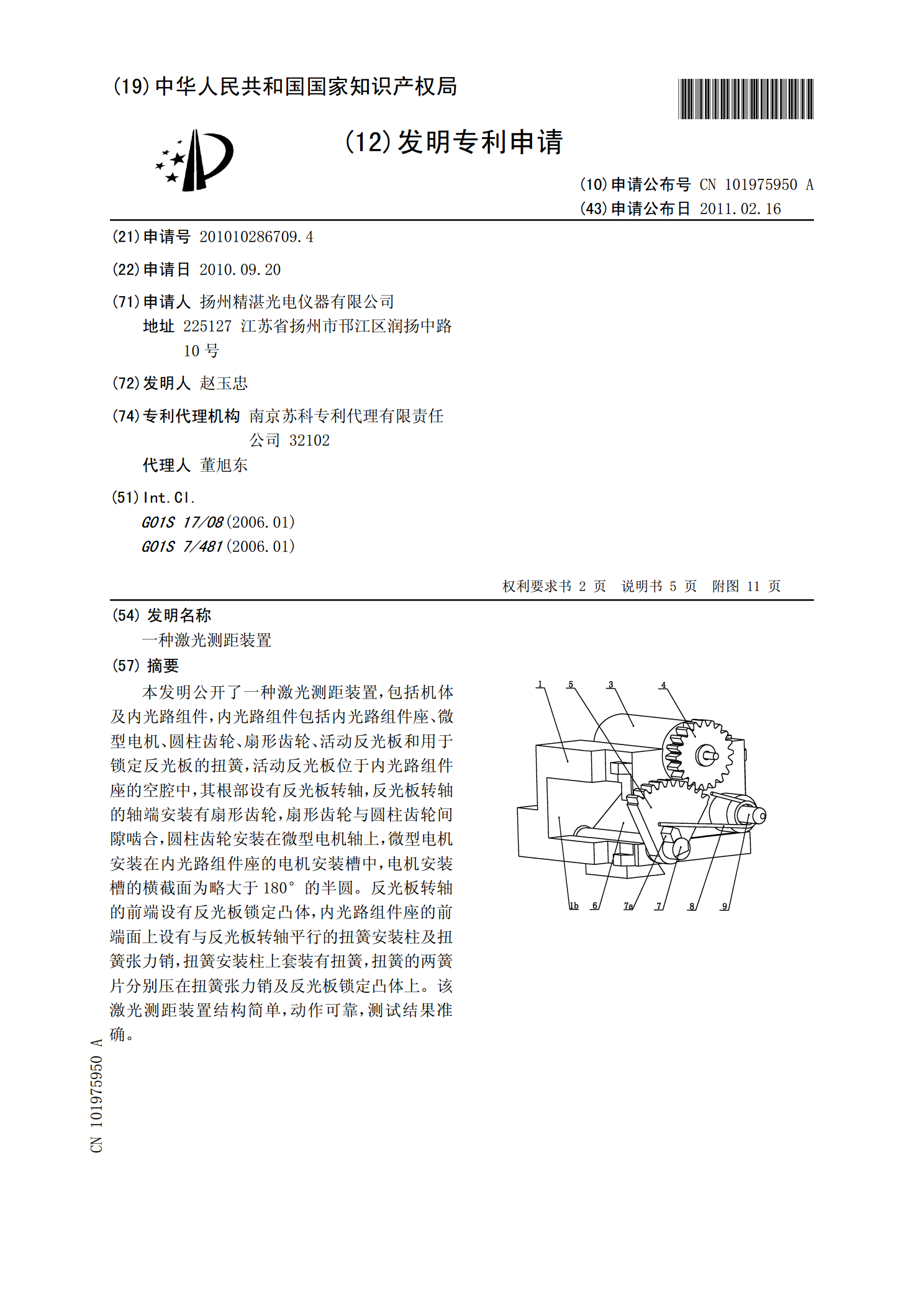
一种激光测距装置.pdf
本发明公开了一种激光测距装置,包括机体及内光路组件,内光路组件包括内光路组件座、微型电机、圆柱齿轮、扇形齿轮、活动反光板和用于锁定反光板的扭簧,活动反光板位于内光路组件座的空腔中,其根部设有反光板转轴,反光板转轴的轴端安装有扇形齿轮,扇形齿轮与圆柱齿轮间隙啮合,圆柱齿轮安装在微型电机轴上,微型电机安装在内光路组件座的电机安装槽中,电机安装槽的横截面为略大于180°的半圆。反光板转轴的前端设有反光板锁定凸体,内光路组件座的前端面上设有与反光板转轴平行的扭簧安装柱及扭簧张力销,扭簧安装柱上套装有扭簧,扭簧的两
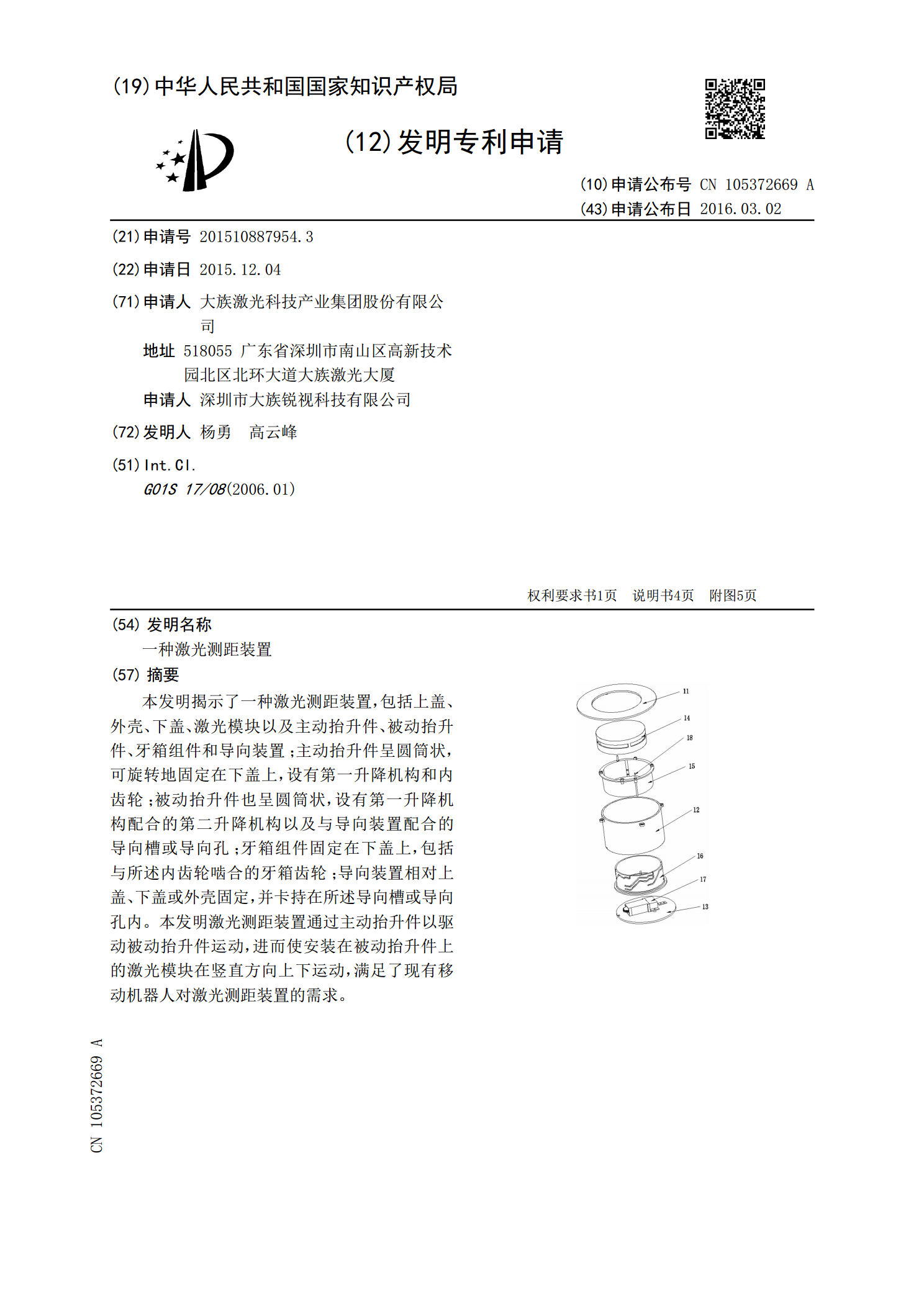
一种激光测距装置.pdf
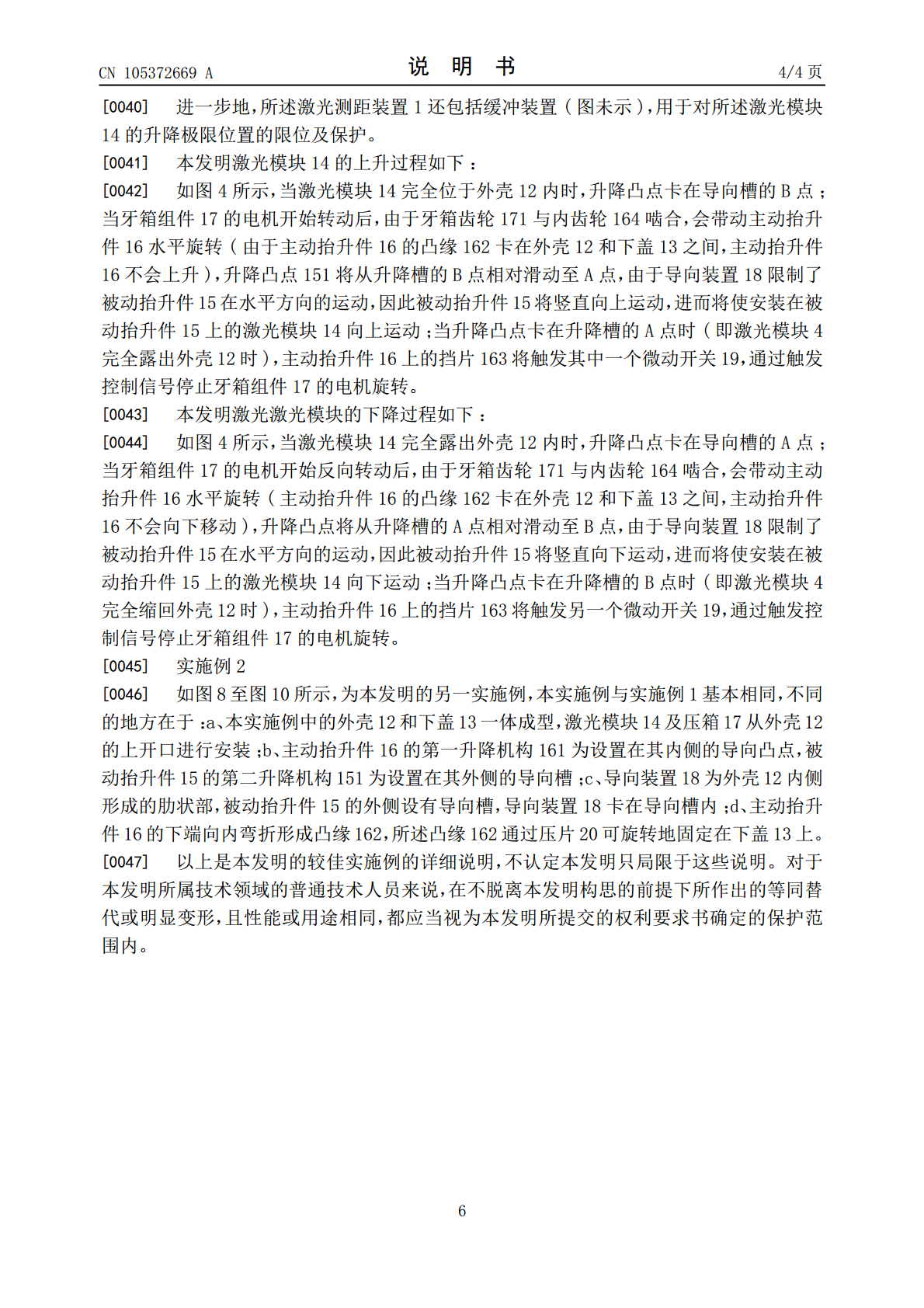
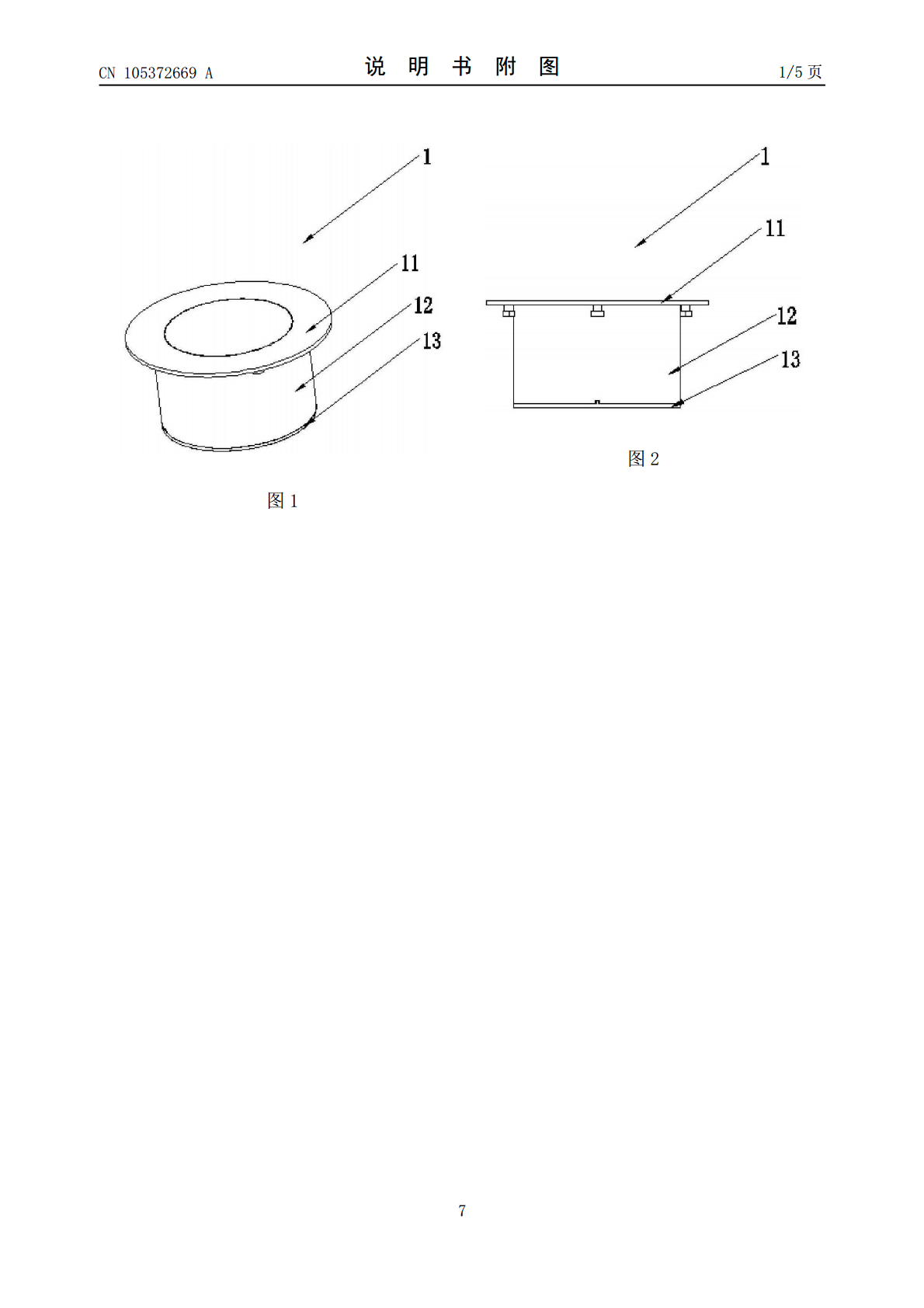
本发明揭示了一种激光测距装置,包括上盖、外壳、下盖、激光模块以及主动抬升件、被动抬升件、牙箱组件和导向装置;主动抬升件呈圆筒状,可旋转地固定在下盖上,设有第一升降机构和内齿轮;被动抬升件也呈圆筒状,设有第一升降机构配合的第二升降机构以及与导向装置配合的导向槽或导向孔;牙箱组件固定在下盖上,包括与所述内齿轮啮合的牙箱齿轮;导向装置相对上盖、下盖或外壳固定,并卡持在所述导向槽或导向孔内。本发明激光测距装置通过主动抬升件以驱动被动抬升件运动,进而使安装在被动抬升件上的激光模块在竖直方向上下运动,满足了现有移动机
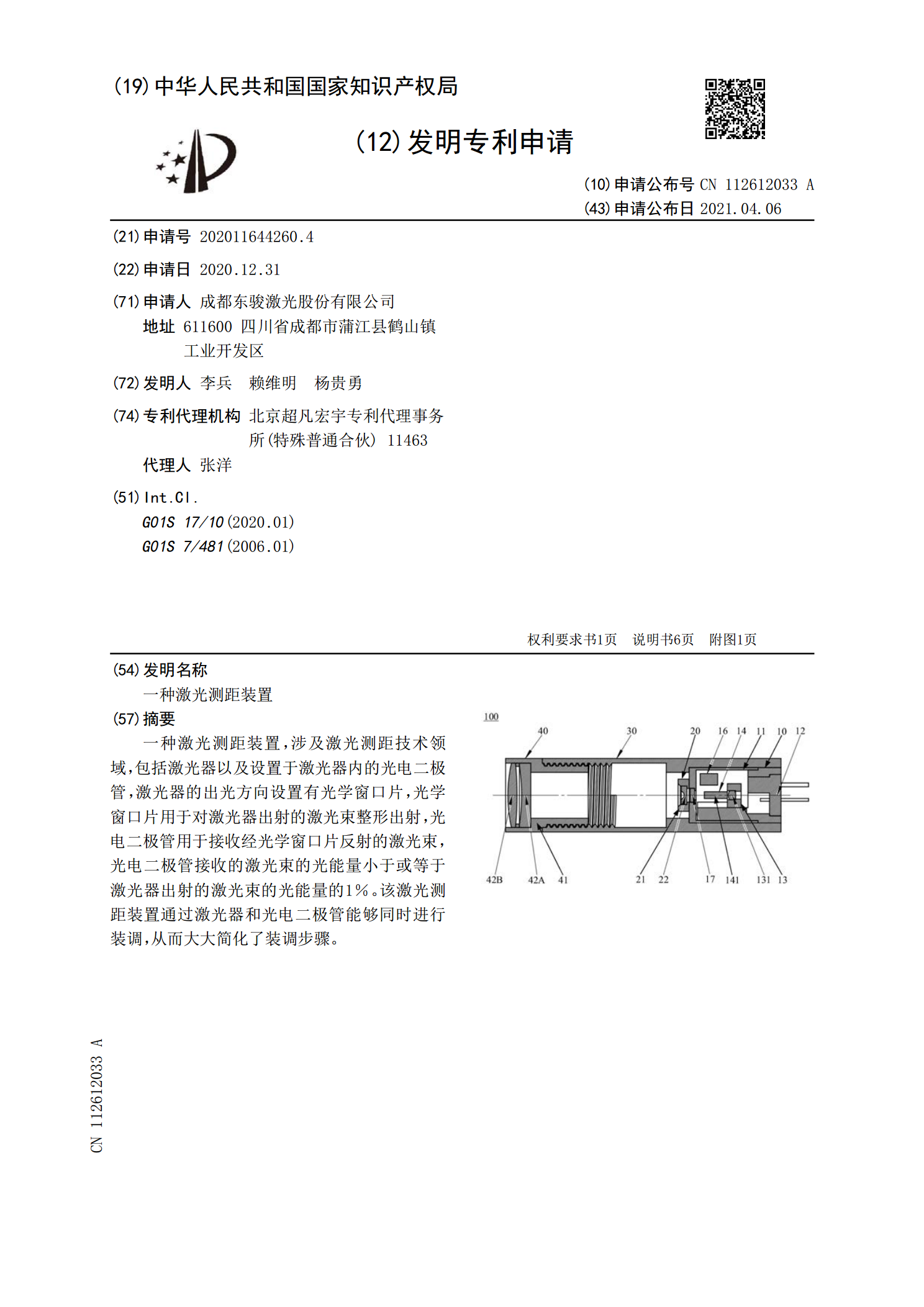
一种激光测距装置.pdf
一种激光测距装置,涉及激光测距技术领域,包括激光器以及设置于激光器内的光电二极管,激光器的出光方向设置有光学窗口片,光学窗口片用于对激光器出射的激光束整形出射,光电二极管用于接收经光学窗口片反射的激光束,光电二极管接收的激光束的光能量小于或等于激光器出射的激光束的光能量的1%。该激光测距装置通过激光器和光电二极管能够同时进行装调,从而大大简化了装调步骤。