
一种萝卜收获机器人的拔取机构.pdf

和裕****az


1/9
2/9

3/9
4/9
5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种萝卜收获机器人的拔取机构.pdf
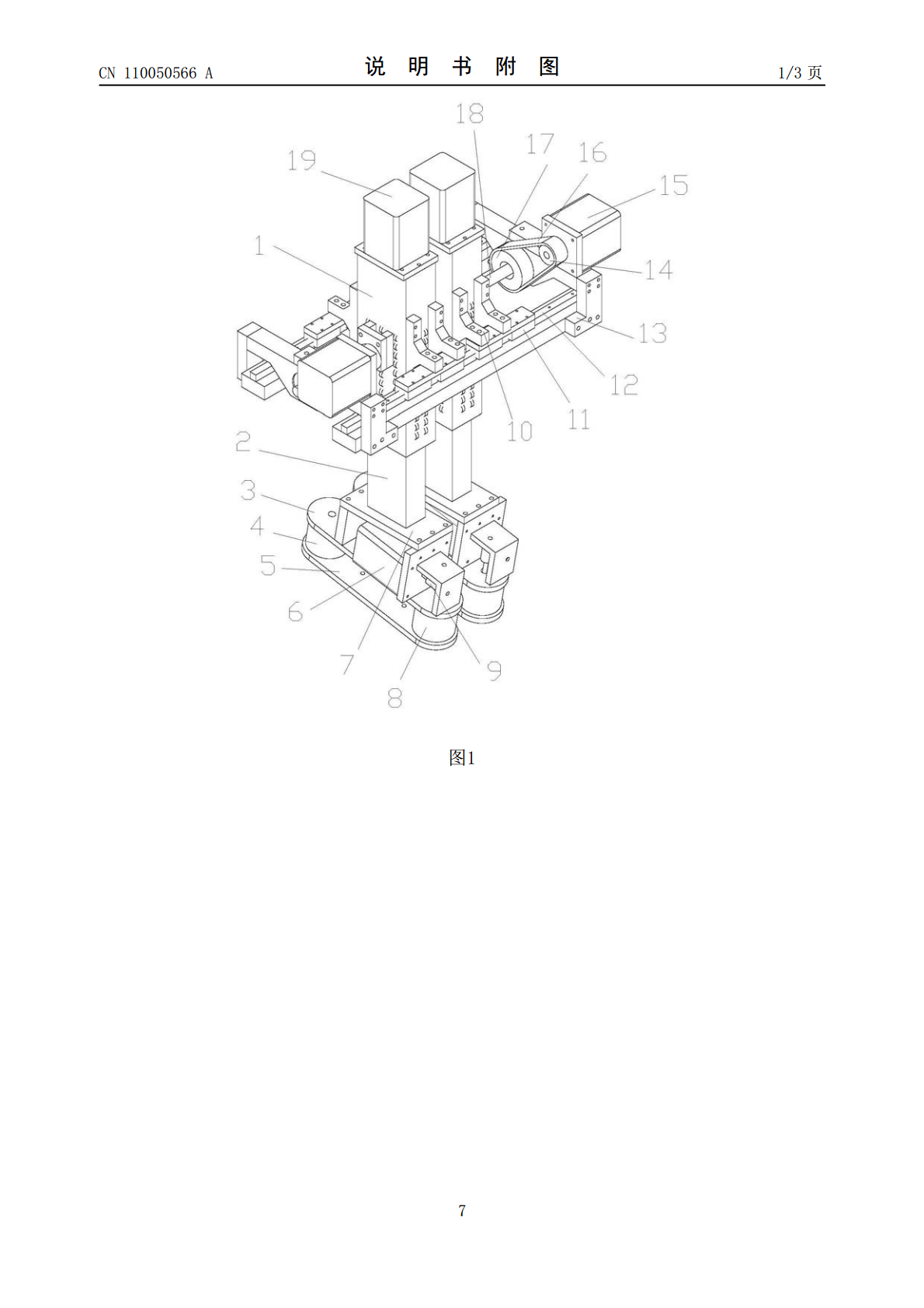
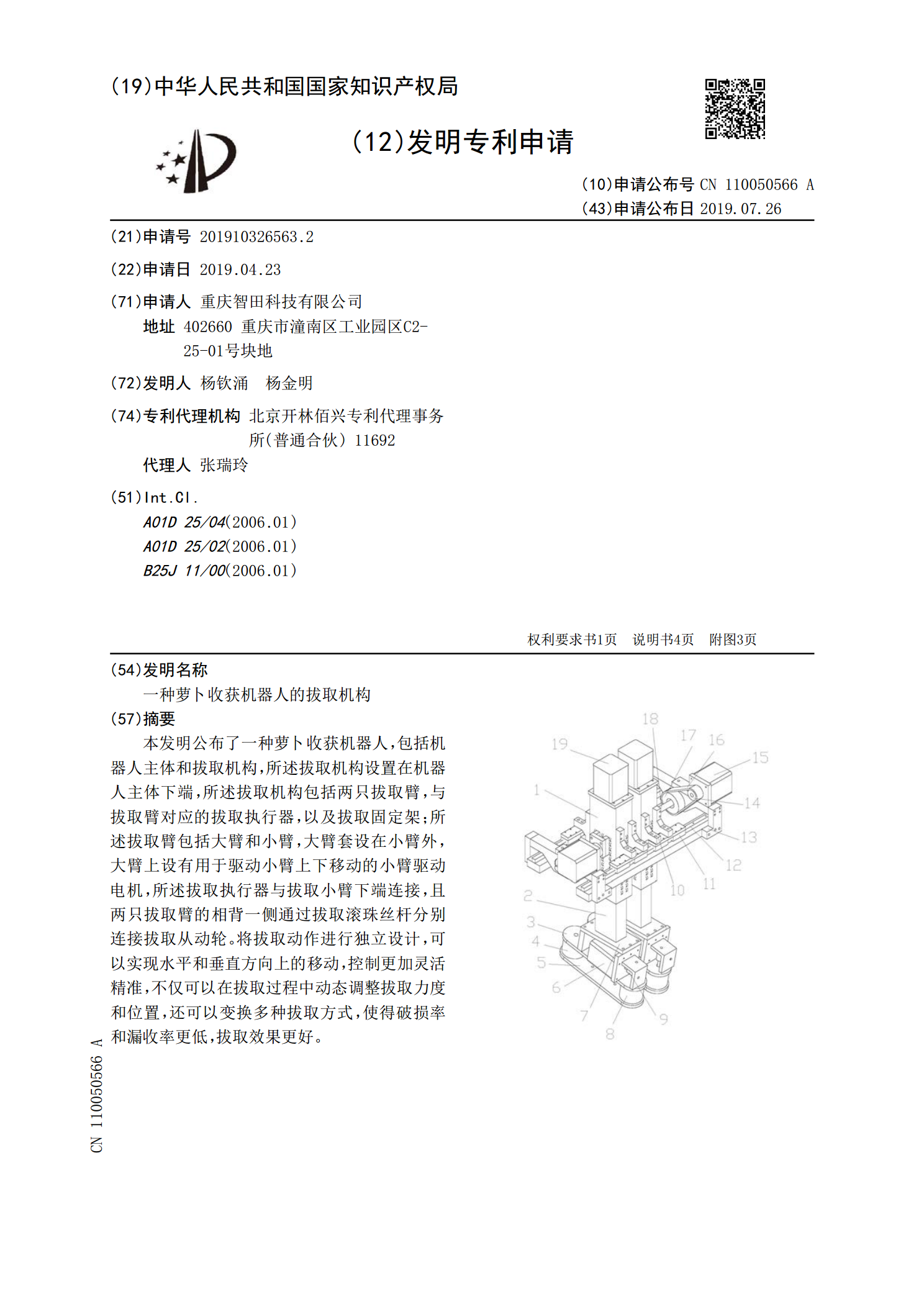
本发明公布了一种萝卜收获机器人,包括机器人主体和拔取机构,所述拔取机构设置在机器人主体下端,所述拔取机构包括两只拔取臂,与拔取臂对应的拔取执行器,以及拔取固定架;所述拔取臂包括大臂和小臂,大臂套设在小臂外,大臂上设有用于驱动小臂上下移动的小臂驱动电机,所述拔取执行器与拔取小臂下端连接,且两只拔取臂的相背一侧通过拔取滚珠丝杆分别连接拔取从动轮。将拔取动作进行独立设计,可以实现水平和垂直方向上的移动,控制更加灵活精准,不仅可以在拔取过程中动态调整拔取力度和位置,还可以变换多种拔取方式,使得破损率和漏收率更低,
一种萝卜拔取收获装置.pdf
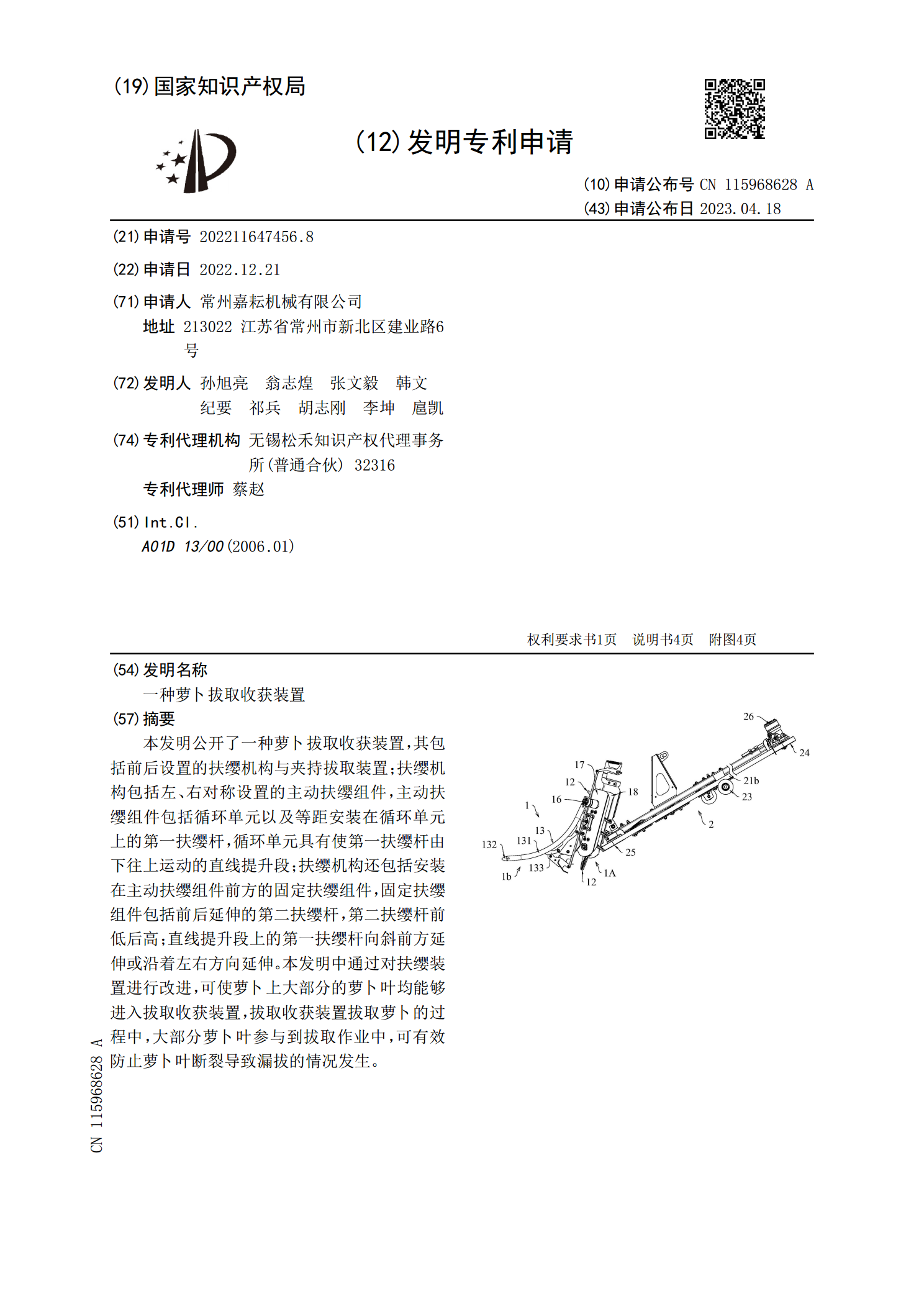
本发明公开了一种萝卜拔取收获装置,其包括前后设置的扶缨机构与夹持拔取装置;扶缨机构包括左、右对称设置的主动扶缨组件,主动扶缨组件包括循环单元以及等距安装在循环单元上的第一扶缨杆,循环单元具有使第一扶缨杆由下往上运动的直线提升段;扶缨机构还包括安装在主动扶缨组件前方的固定扶缨组件,固定扶缨组件包括前后延伸的第二扶缨杆,第二扶缨杆前低后高;直线提升段上的第一扶缨杆向斜前方延伸或沿着左右方向延伸。本发明中通过对扶缨装置进行改进,可使萝卜上大部分的萝卜叶均能够进入拔取收获装置,拔取收获装置拔取萝卜的过程中,大部分
一种胡萝卜收获用拔取装置.pdf
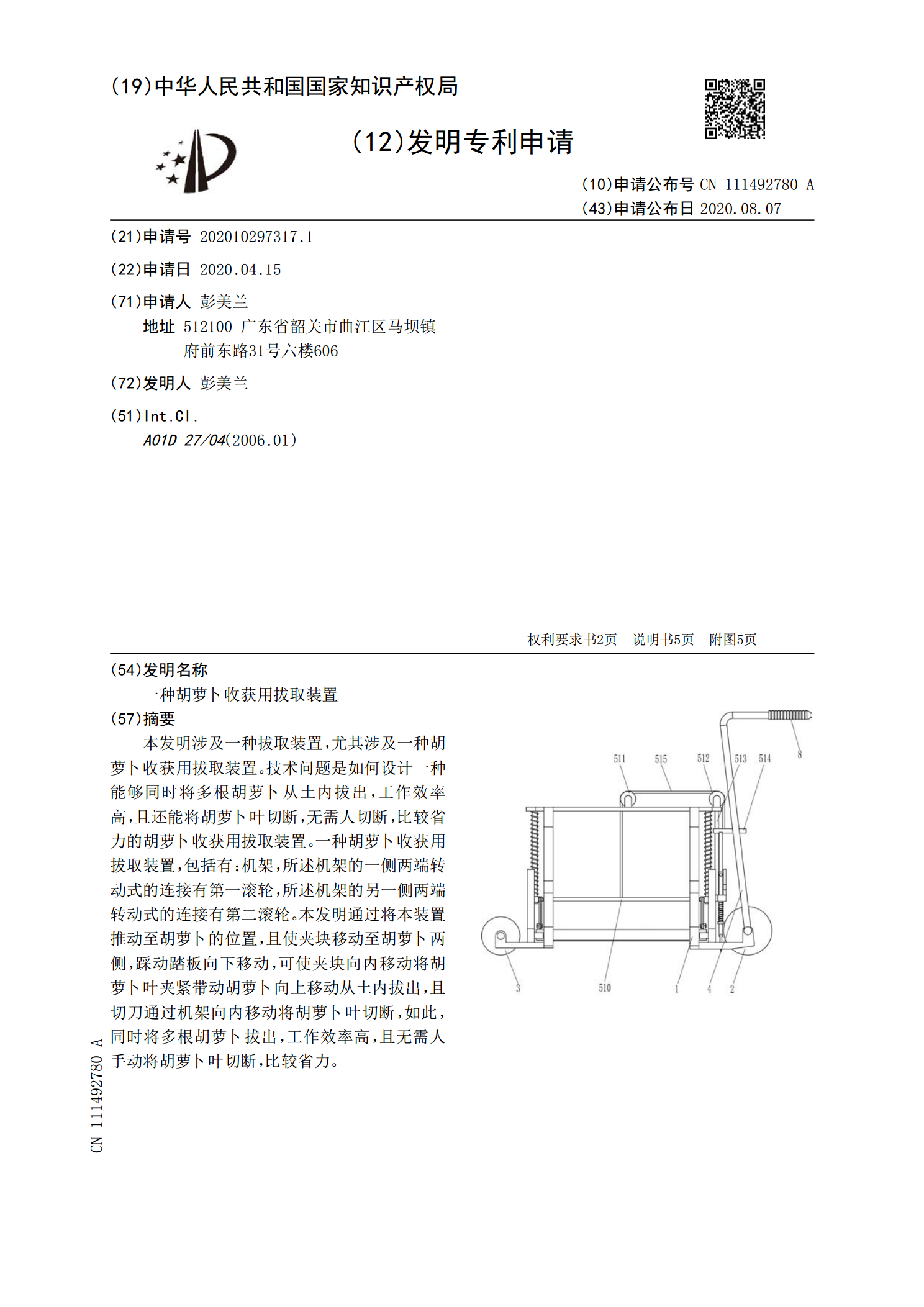
本发明涉及一种拔取装置,尤其涉及一种胡萝卜收获用拔取装置。技术问题是如何设计一种能够同时将多根胡萝卜从土内拔出,工作效率高,且还能将胡萝卜叶切断,无需人切断,比较省力的胡萝卜收获用拔取装置。一种胡萝卜收获用拔取装置,包括有:机架,所述机架的一侧两端转动式的连接有第一滚轮,所述机架的另一侧两端转动式的连接有第二滚轮。本发明通过将本装置推动至胡萝卜的位置,且使夹块移动至胡萝卜两侧,踩动踏板向下移动,可使夹块向内移动将胡萝卜叶夹紧带动胡萝卜向上移动从土内拔出,且切刀通过机架向内移动将胡萝卜叶切断,如此,同时将多
一种侧悬挂拔取式胡萝卜收获装置.pdf
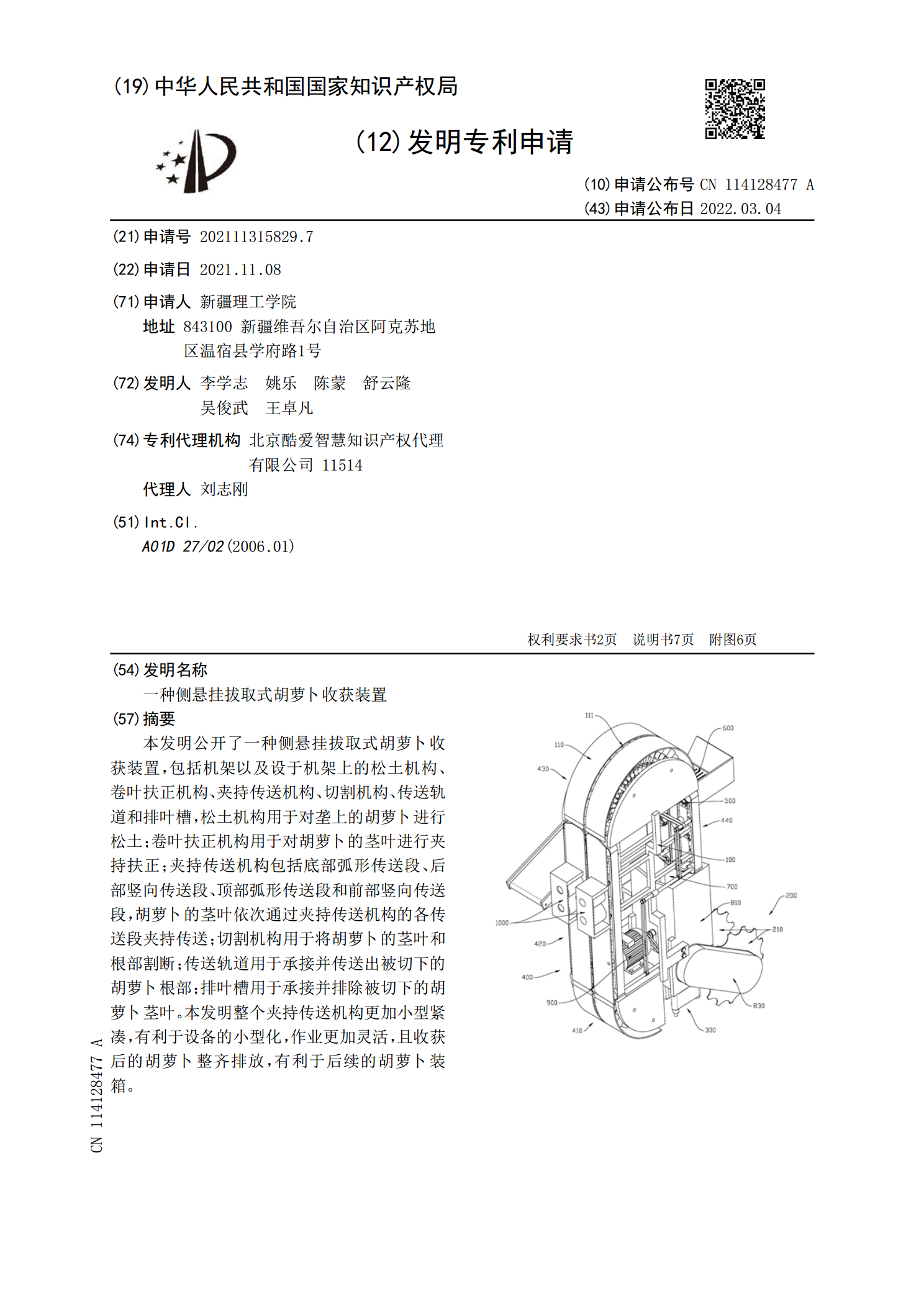
本发明公开了一种侧悬挂拔取式胡萝卜收获装置,包括机架以及设于机架上的松土机构、卷叶扶正机构、夹持传送机构、切割机构、传送轨道和排叶槽,松土机构用于对垄上的胡萝卜进行松土;卷叶扶正机构用于对胡萝卜的茎叶进行夹持扶正;夹持传送机构包括底部弧形传送段、后部竖向传送段、顶部弧形传送段和前部竖向传送段,胡萝卜的茎叶依次通过夹持传送机构的各传送段夹持传送;切割机构用于将胡萝卜的茎叶和根部割断;传送轨道用于承接并传送出被切下的胡萝卜根部;排叶槽用于承接并排除被切下的胡萝卜茎叶。本发明整个夹持传送机构更加小型紧凑,有利于

双行拔取式胡萝卜收获机设计研究的任务书.docx
双行拔取式胡萝卜收获机设计研究的任务书任务书一、背景和目的胡萝卜是一种常见的蔬菜,且具有良好的营养价值,因而广受人们喜爱。而胡萝卜的收获需要人工操作,效率较低且成本较高。因此,设计一款双行拔取式的胡萝卜收获机就显得非常必要,在提高胡萝卜收获效率的同时,也能够减少人工成本,节省劳动力资源。为此,本任务书旨在要求设计一款高效、省力、安全的双行拔取式胡萝卜收获机。二、任务描述1.定义任务:本任务要求研究双行拔取式胡萝卜收获机的设计,包括该机器的构造、工作原理及其控制方法。通过对已有的胡萝卜收获机进行分析和比较,