
一种电力巡检快速精确位置定位的方法及装置.pdf

纪阳****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电力巡检快速精确位置定位的方法及装置.pdf
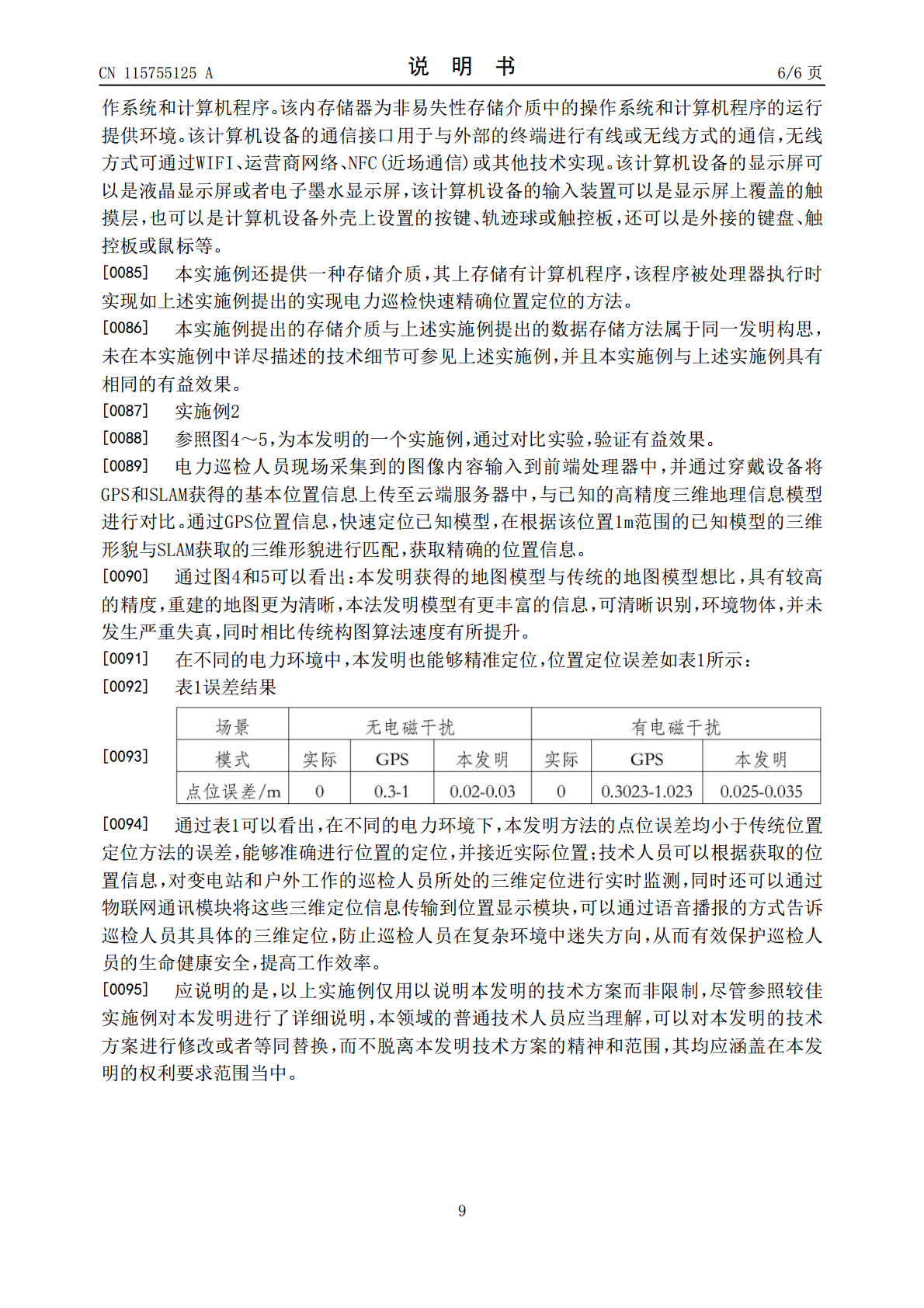
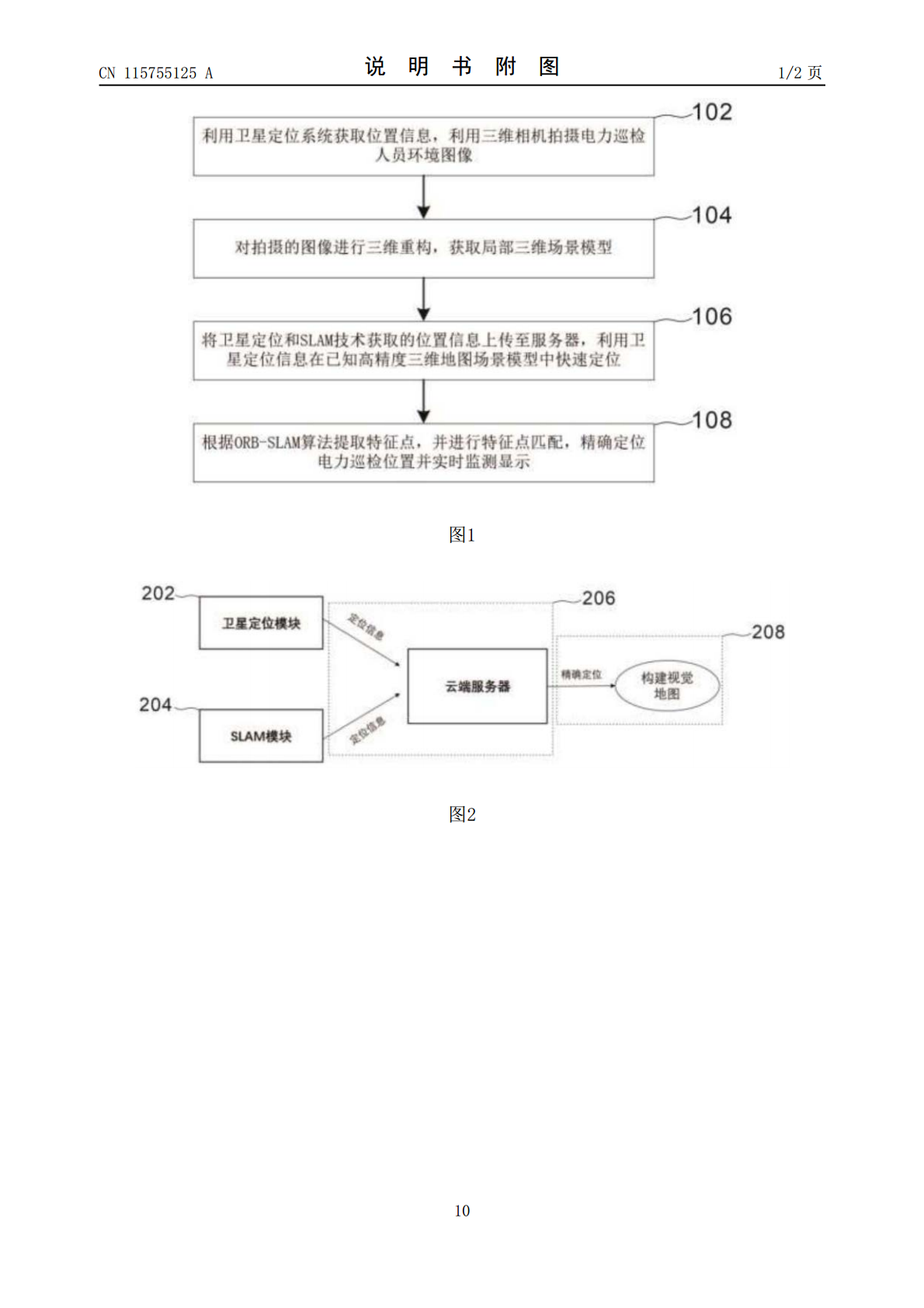
本发明公开了一种电力巡检快速精确位置定位的方法及装置,包括:通过卫星定位获取原始位置信息并采集原始位置的图像;对图像进行三维重构处理,利用SLAM技术生成三维重构处理后的图像的局部三维场景模型;将卫星定位和SLAM技术获取的位置信息上传至服务器,通过卫星定位信息,初步定位服务器内已知的高精度三维地图场景模型;根据ORB‑SLAM算法提取高精度三维地图场景模型的特征点,并与局部三维场景模型特征点进行匹配,精确定位电力巡检位置并实时监测显示。本发明对特征点进行匹配,实现位置的精准定位,有效的保护了巡检人员的生

一种撕裂绳位置精确定位生产装置与方法.pdf
一种撕裂绳位置精确定位生产装置与方法,涉及线缆生产技术领域,该装置包括立柱与高度调节柱,所述立柱的底端固定安装在一底座上,立柱的中端设有固定装置,所述高度调节柱的底端活动插装在立柱的顶端,高度调节柱顶端设有定位装置;所述固定装置包括卡盘安装杆与两个卡盘,所述卡盘安装杆的一端垂直安装于立柱,所述两个卡盘分别插装在卡盘安装杆的两端;所述定位装置包括安装杆与定位导轮,所述安装杆位于卡盘安装杆的正上方,且安装杆的一端垂直安装于高度调节柱,另一端安装所述定位导轮。本发明能够控制撕裂绳在光缆内部的位置及撕裂绳之间夹角

基于二次分步定位的快速精确位置控制方法研究.docx
基于二次分步定位的快速精确位置控制方法研究摘要:本文研究了一种基于二次分步定位的快速精确位置控制方法。该方法通过将位置控制分为两个步骤,即加速与匀速控制,以在短时间内达到精确的位置控制。该方法在实验结果中表现出良好的精度和稳定性,对于一些需要快速精确位置控制的应用具有很大的应用价值。关键词:二次分步定位,位置控制,加速控制,匀速控制一、绪论在工业生产和机器人控制等领域,精确的位置控制是非常重要的。为了实现精确位置控制,需要采用优秀的控制方法。本文研究了一种基于二次分步定位的快速精确位置控制方法。该方法可以

一种电力巡检装置及方法.pdf
本公开公开了一种电力巡检装置及方法,涉及管廊巡检领域,包括至少两个巡检设备、通信机构,巡检机构布置在相邻的两面防火墙之间的管廊节段内,每段管廊节段内布置有至少一个巡检设备,通信机构安装在相邻管廊节段的防火墙上,通信机构一端第一接口朝向一管廊节段,另一端穿过防火墙第二接口朝向另一管廊节段,接口用于对接对应管廊节段内布置的巡检设备的接头,相邻管廊节段内的巡检设备通过通信机构有线通信,对于防火墙留设巡检机器人通道后存在防火阻隔能力下降的问题,在防火墙内埋设通信线路,巡检机器人无需直接穿过防火墙,也能实现数据的有

一种精确平面定位装置及方法.pdf
本发明涉及一种精确平面定位装置及方法,其特征是:至少包括三个或三个以上基站,基站向平面空间分别发送同步无线电波和声波,在可检测的平面空间内,有多个移动目标感知器,每一个移动目标感知器都有一个声检测器和无线收发器,移动目标感知器与基站通过无线电波和声波连接。本发明由于采用无线和声频技术,前者具有速度快、信息量大、时间精度高的优点,后者具有检测距离精度高的特点,且成本低,通过无线和声频技术结合,实现定位及通信,具有定位精度高、成本低的优势。