
一种垃圾智能分类机器人.pdf

光誉****君哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种垃圾智能分类机器人.pdf
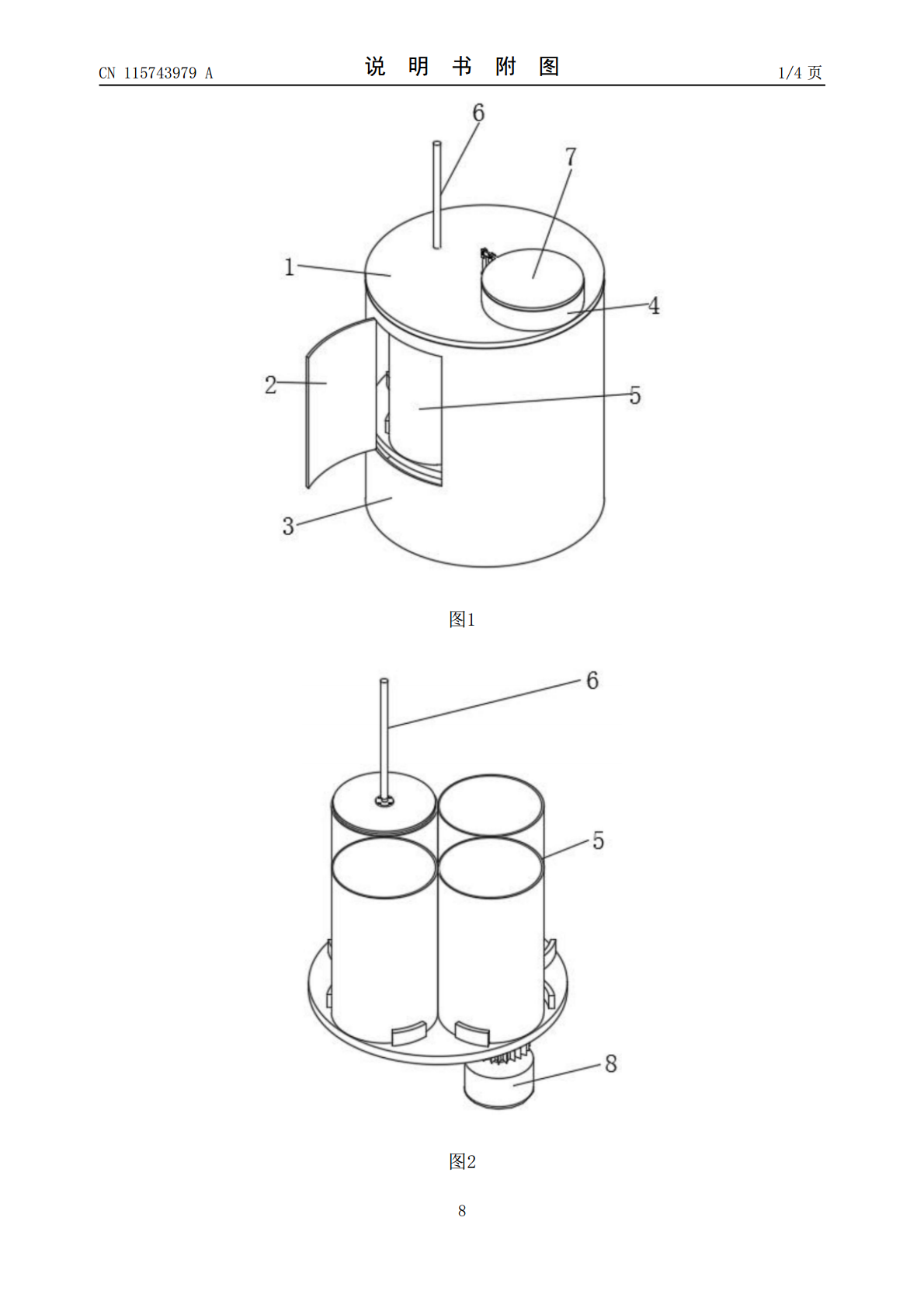
本发明公开了一种垃圾智能分类机器人,涉及垃圾分类领域。一种垃圾智能分类机器人,包括设备外壳,设备外壳一侧活动安装有密封舱门,设备外壳上端固定安装有密封上盖,密封上盖上表面位边缘处固定安装有垃圾进口,垃圾进口上设有密封机构,设备外壳内安装有收集机构,设备外壳内位于转向盘下方安装有驱动机构,垃圾收集桶上方位于密封上盖上安装有压缩机构,密封舱门上设有合页,密封舱门通过合页活动安装在设备外壳上,密封上盖通过螺丝固定在设备外壳上端。第一齿轮旋转之后其会带动驱动轴旋转,驱动轴旋转之后其会带动转向轴上的转向盘旋转,从而

智能垃圾分类机器人.ppt
智能垃圾分类机器人一、Arduino的由来二、什么是Arduino?三、Arduino能做什么?三、Arduino能做什么?让你的arduino连入物联网四、认识Arduino开发板---ArduinoUNO四、认识Arduino开发板---arduinoMega2560五、Arduino开发环境六、函数的概念七、Arduino的常用基本函数Arduino常用函数---pinMode()Arduino常用函数---digitalWrite()Arduino常用基本函数---digitalRead()Ard

智能垃圾分类机器人.pdf
一种智能垃圾分类机器人,它包括垃圾分离装置和垃圾分类装置,垃圾分离装置是由垃圾斗和曲柄摇杆机构构成,其中垃圾斗包括垃圾挡板、底板、侧板、激光发射管Ⅰ、金属接近开关、激光接收器Ⅰ、隔板、金属接近开关支架、旋转轴、舵机Ⅰ、垃圾分离柱插孔和垃圾分离柱,曲柄摇杆机构包括联轴器、曲柄Ⅰ、直流减速电机Ⅰ和连杆,垃圾分类装置包括直流减速电机Ⅱ、传动轴、主动链轮、控制系统、从动链轮、垃圾箱、激光发射管Ⅱ、太阳能板、摄像头支架、链板、摄像头、支架本体、激光接收器Ⅱ、从动齿轮、主动齿轮、竖向支架、舵机Ⅱ、曲柄Ⅱ、滑轨和滑块;

智能垃圾分类机器人.pptx
智能垃圾分类机器人2一、Arduino的由来二、什么是Arduino?三、Arduino能做什么?三、Arduino能做什么?让你的arduino连入物联网四、认识Arduino开发板---ArduinoUNO四、认识Arduino开发板---arduinoMega2560五、Arduino开发环境六、函数的概念七、Arduino的常用基本函数Arduino常用函数---pinMode()Arduino常用函数---digitalWrite()Arduino常用基本函数---digitalRead()Ar

智能垃圾分类机器人.ppt
智能垃圾分类机器人一、Arduino的由来二、什么是Arduino?三、Arduino能做什么?三、Arduino能做什么?让你的arduino连入物联网四、认识Arduino开发板---ArduinoUNO四、认识Arduino开发板---arduinoMega2560五、Arduino开发环境六、函数的概念七、Arduino的常用基本函数Arduino常用函数---pinMode()Arduino常用函数---digitalWrite()Arduino常用基本函数---digitalRead()Ard