
一种船用起重机新型变矩控制方法.pdf

景福****90

1/6
2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种船用起重机新型变矩控制方法.pdf
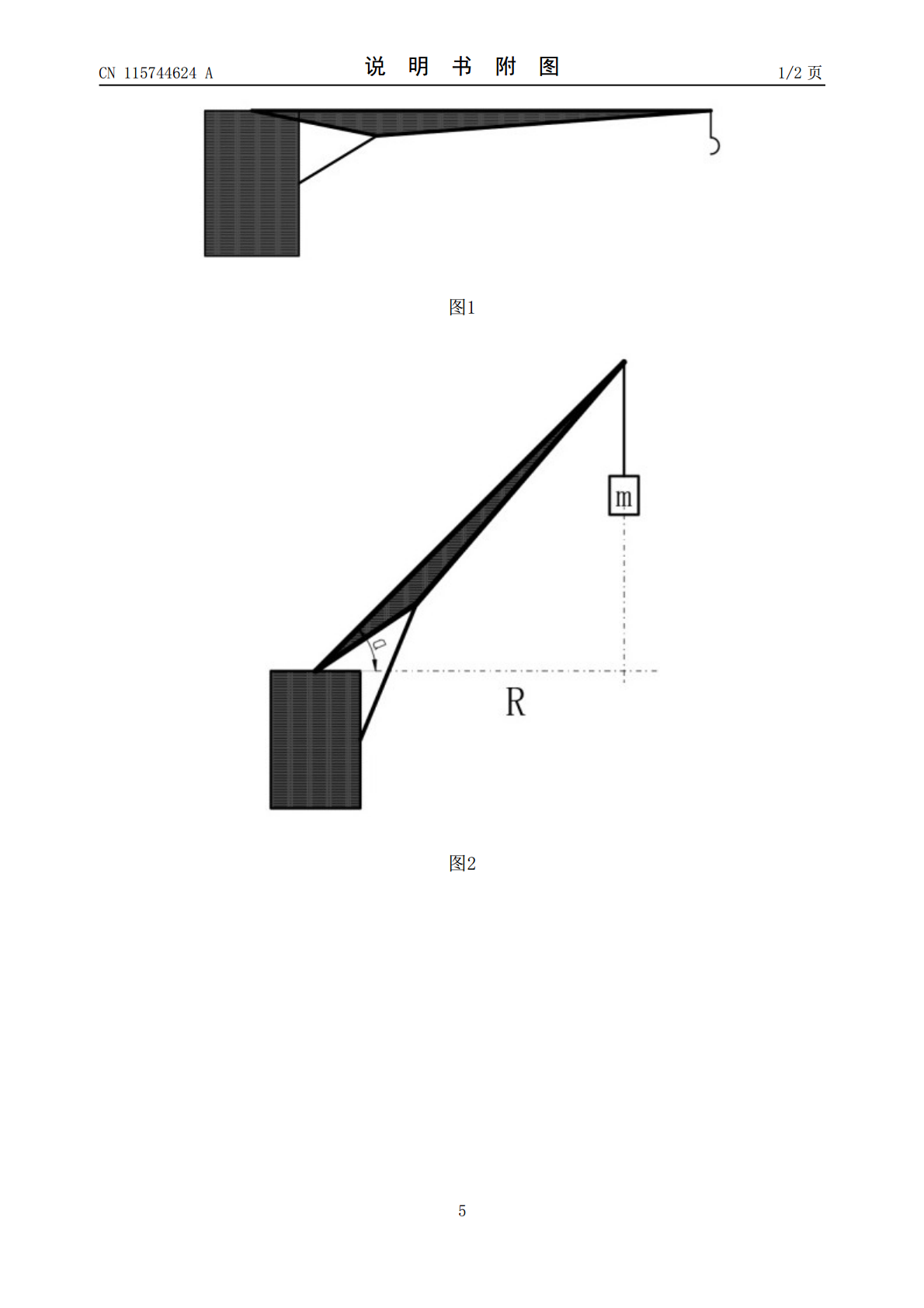
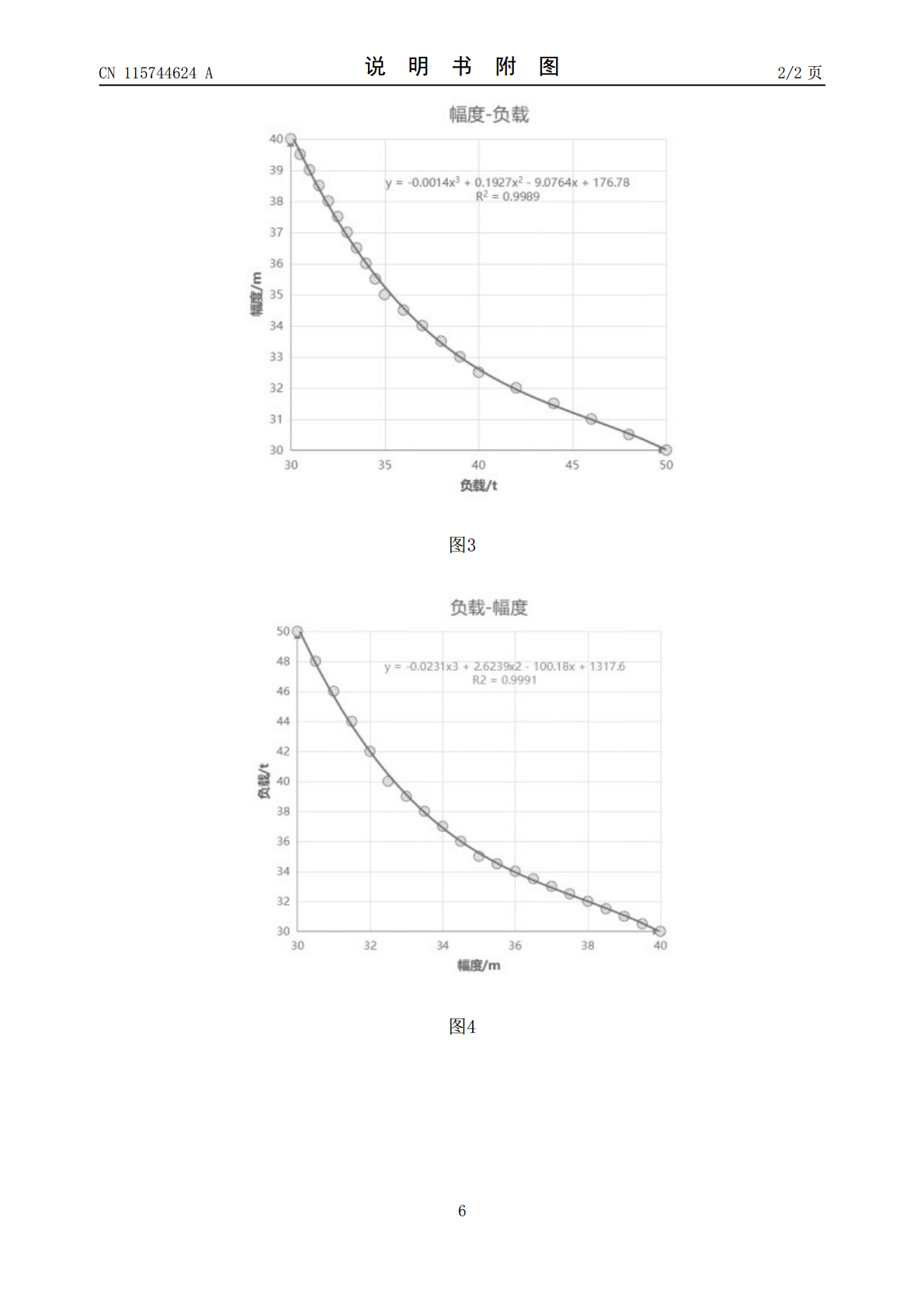
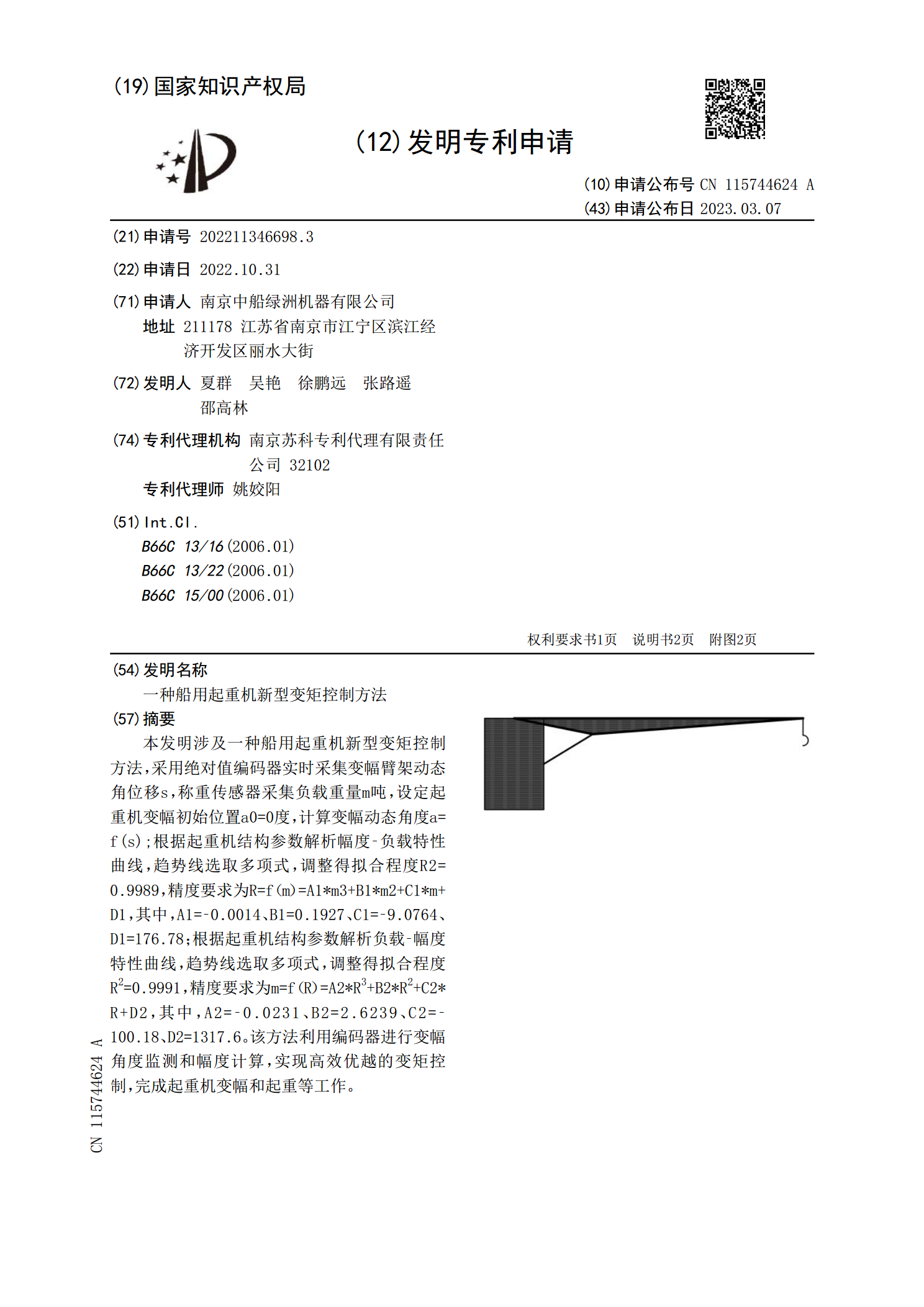
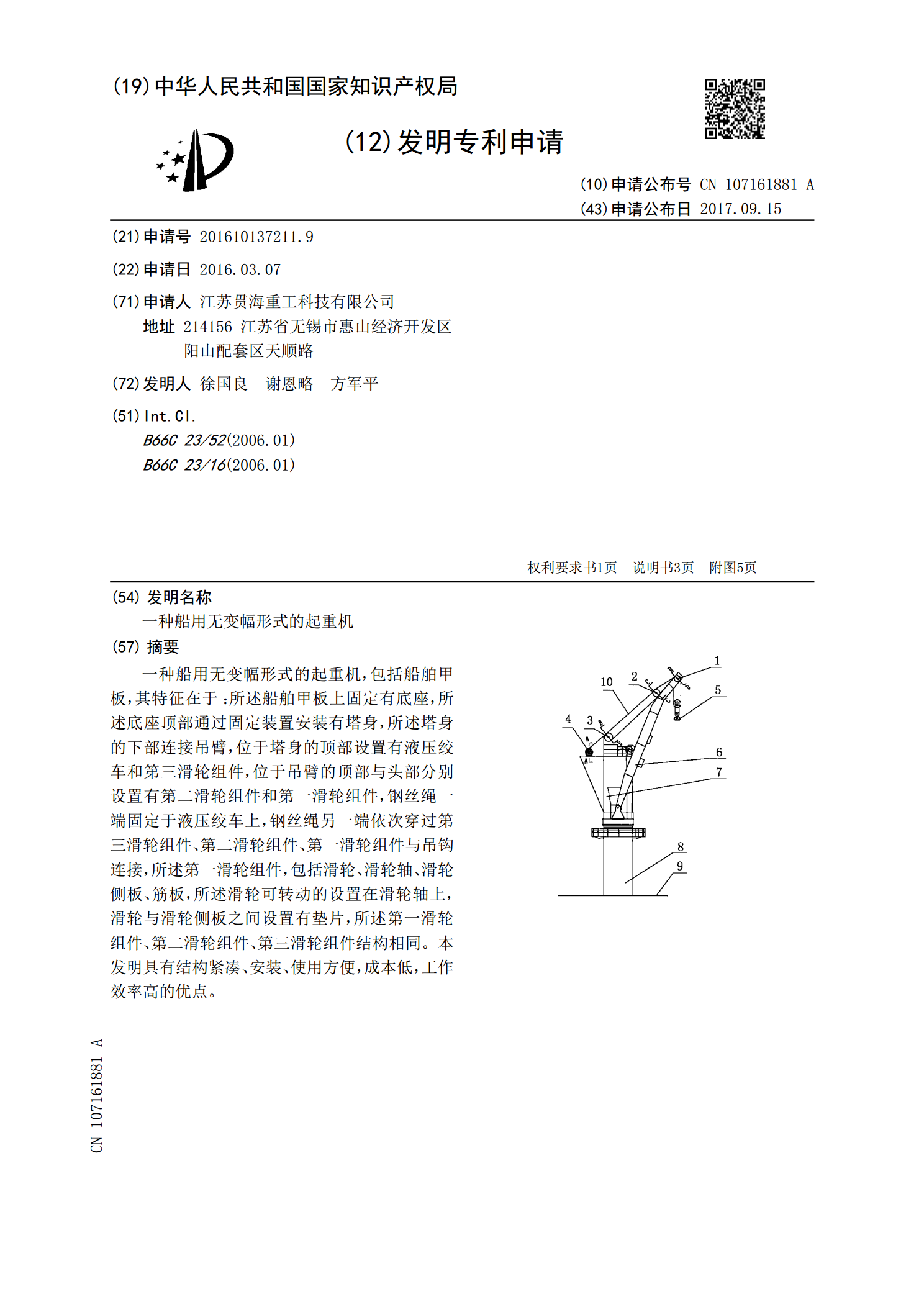
本发明涉及一种船用起重机新型变矩控制方法,采用绝对值编码器实时采集变幅臂架动态角位移s,称重传感器采集负载重量m吨,设定起重机变幅初始位置a0=0度,计算变幅动态角度a=f(s);根据起重机结构参数解析幅度‑负载特性曲线,趋势线选取多项式,调整得拟合程度R2=0.9989,精度要求为R=f(m)=A1*m3+B1*m2+C1*m+D1,其中,A1=‑0.0014、B1=0.1927、C1=‑9.0764、D1=176.78;根据起重机结构参数解析负载‑幅度特性曲线,趋势线选取多项式,调整得拟合程度R
一种船用无变幅形式的起重机.pdf
一种船用无变幅形式的起重机,包括船舶甲板,其特征在于:所述船舶甲板上固定有底座,所述底座顶部通过固定装置安装有塔身,所述塔身的下部连接吊臂,位于塔身的顶部设置有液压绞车和第三滑轮组件,位于吊臂的顶部与头部分别设置有第二滑轮组件和第一滑轮组件,钢丝绳一端固定于液压绞车上,钢丝绳另一端依次穿过第三滑轮组件、第二滑轮组件、第一滑轮组件与吊钩连接,所述第一滑轮组件,包括滑轮、滑轮轴、滑轮侧板、筋板,所述滑轮可转动的设置在滑轮轴上,滑轮与滑轮侧板之间设置有垫片,所述第一滑轮组件、第二滑轮组件、第三滑轮组件结构相同。

一种新型液力变矩器变矩性能的研究.docx
一种新型液力变矩器变矩性能的研究新型液力变矩器变矩性能的研究摘要:液力变矩器是一种常用的动力传动装置,广泛应用于汽车、工程机械等领域。变矩器的关键性能指标是其变矩性能,其对整个动力传动系统的效率和性能有重要影响。本文针对现有液力变矩器的性能问题进行研究,提出了一种新型液力变矩器的设计方案,并对其变矩性能进行了实验和分析。研究结果表明,新型液力变矩器具有较好的变矩性能,能够满足不同工况下的需求。1.引言液力变矩器是由泵轮、涡轮、导向叶片等组成的液力传动装置,其工作原理是利用液体的离心力和涡旋运动原理来实现动
船用减摇起重机减摇控制方法.pdf
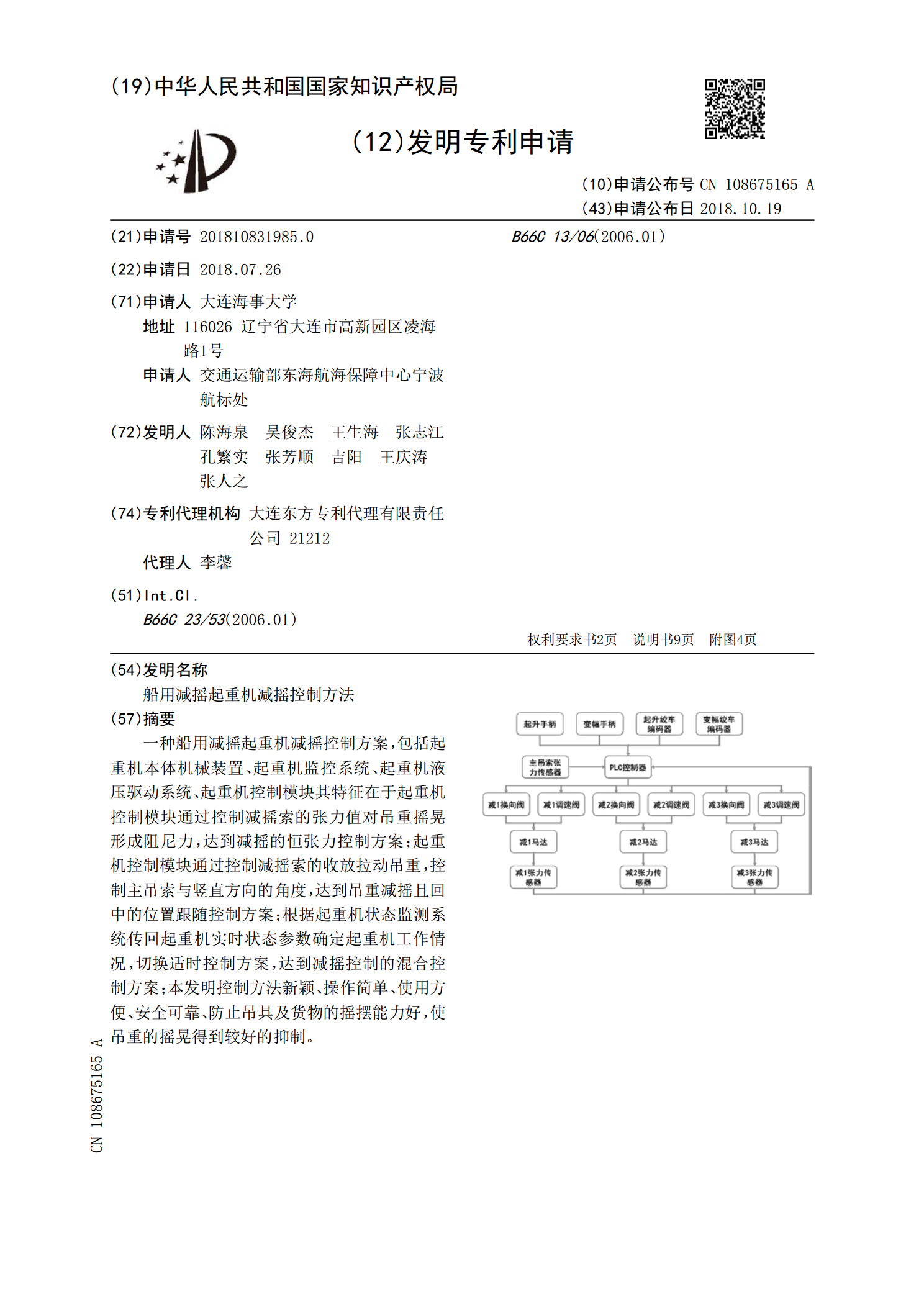
一种船用减摇起重机减摇控制方案,包括起重机本体机械装置、起重机监控系统、起重机液压驱动系统、起重机控制模块其特征在于起重机控制模块通过控制减摇索的张力值对吊重摇晃形成阻尼力,达到减摇的恒张力控制方案;起重机控制模块通过控制减摇索的收放拉动吊重,控制主吊索与竖直方向的角度,达到吊重减摇且回中的位置跟随控制方案;根据起重机状态监测系统传回起重机实时状态参数确定起重机工作情况,切换适时控制方案,达到减摇控制的混合控制方案;本发明控制方法新颖、操作简单、使用方便、安全可靠、防止吊具及货物的摇摆能力好,使吊重的摇晃
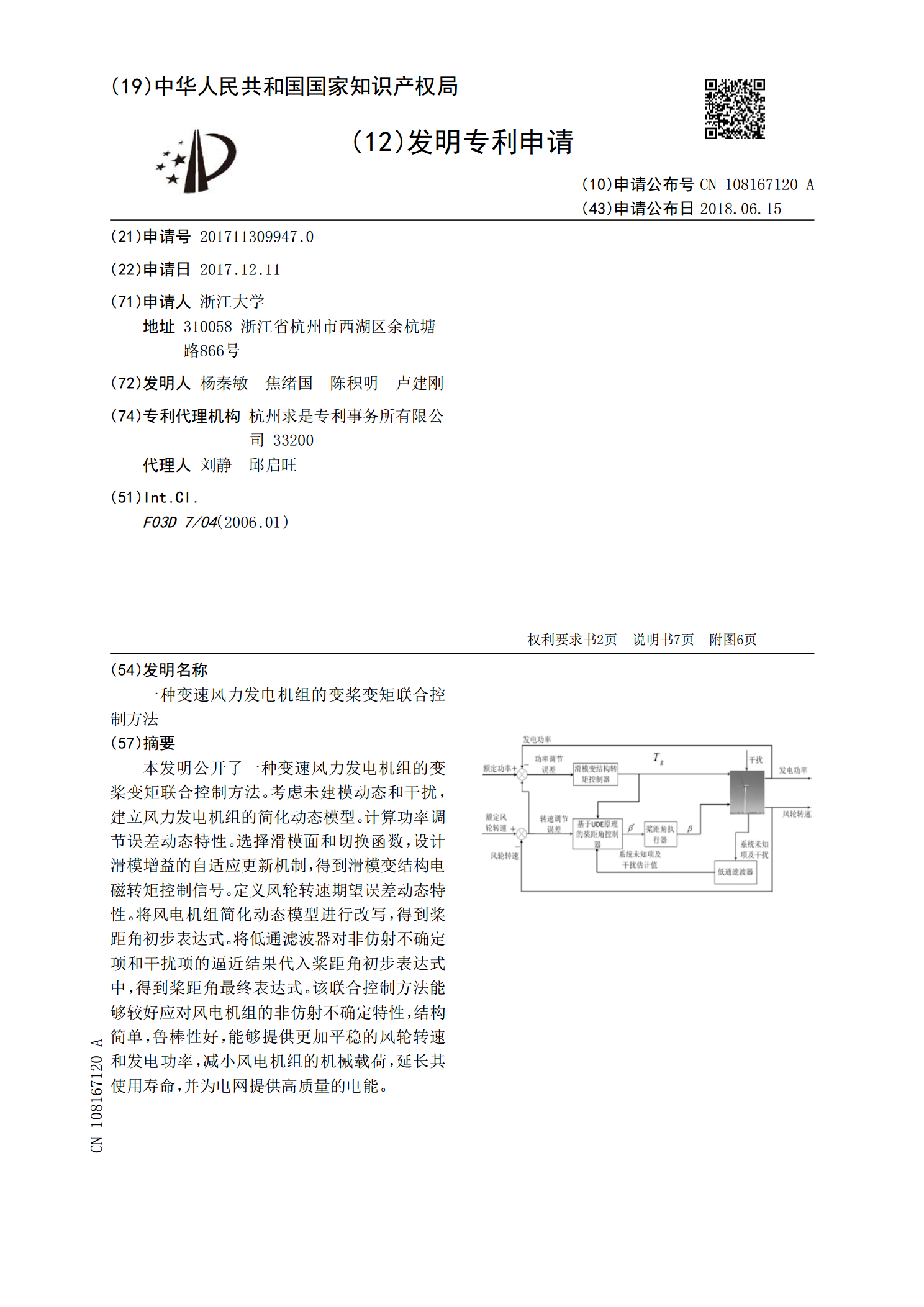
一种变速风力发电机组的变桨变矩联合控制方法.pdf
本发明公开了一种变速风力发电机组的变桨变矩联合控制方法。考虑未建模动态和干扰,建立风力发电机组的简化动态模型。计算功率调节误差动态特性。选择滑模面和切换函数,设计滑模增益的自适应更新机制,得到滑模变结构电磁转矩控制信号。定义风轮转速期望误差动态特性。将风电机组简化动态模型进行改写,得到桨距角初步表达式。将低通滤波器对非仿射不确定项和干扰项的逼近结果代入桨距角初步表达式中,得到桨距角最终表达式。该联合控制方法能够较好应对风电机组的非仿射不确定特性,结构简单,鲁棒性好,能够提供更加平稳的风轮转速和发电功率,减