
船用减摇起重机减摇控制方法.pdf

论文****轩吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

船用起重机减摇技术试验台测控系统设计与张力减摇实验的开题报告.docx
船用起重机减摇技术试验台测控系统设计与张力减摇实验的开题报告一、选题意义及背景随着我国海洋经济蓬勃发展,船舶作为其中一个重要的行业,面临着更高的安全、舒适、稳定的要求。而船用起重机作为船舶上的主要设备之一,其安全性和稳定性更是至关重要。船用起重机在航行中,由于海浪和风浪的影响,很容易产生船体和起重物的晃动,即所谓船体摇晃,起重物摆动,如何有效的控制减摇就是值得深入研究的问题。为了减少船体摇晃和起重物摆动这些不稳定因素产生的影响,国内外许多研究者开展了针对船用起重机的减摇研究。现有的俯仰减摇技术主要采用两种

船用起重机减摇装置液压系统设计与试验研究.docx
船用起重机减摇装置液压系统设计与试验研究摘要:本文主要介绍了船用起重机减摇装置液压系统的设计和试验研究。首先,介绍了减摇装置的概念和原理。然后,根据实际需求,设计了液压系统的各个组成部分,包括油液箱、液压泵、执行元件等。最后,通过试验验证了液压系统的可靠性和稳定性,为实际应用提供了依据。关键词:船用起重机;减摇装置;液压系统;设计;试验研究一、引言船用起重机在海上作业时,受到海浪和风浪的影响会产生较大的摇晃,给工作带来很大的影响和困难。为了保证船用起重机的安全和稳定性,研发减摇装置已经成为海上起重机技术的

船用起重机减摇技术试验台机械结构设计及减摇实验研究的任务书.docx
船用起重机减摇技术试验台机械结构设计及减摇实验研究的任务书任务书一、任务背景船用起重机是众多的船舶设备之一。然而,由于船舶在海上航行时受到的自然环境因素较大,如风浪等,猛烈的摇晃会直接影响到起重机的稳定性和工作效率。因此,在海上作业中,如何减小船用起重机的晃动以提高其工作效率是目前亟待解决的一个问题。本次任务研究的目的是设计一种可以减小船用起重机摇晃的技术,并通过试验台机械结构设计及减摇实验的方法进行验证和检验,从而提高船用起重机的稳定性和工作效率。二、任务目的1.了解目前船用起重机摇晃的主要原因,并研究
起重机减摇装置.pdf
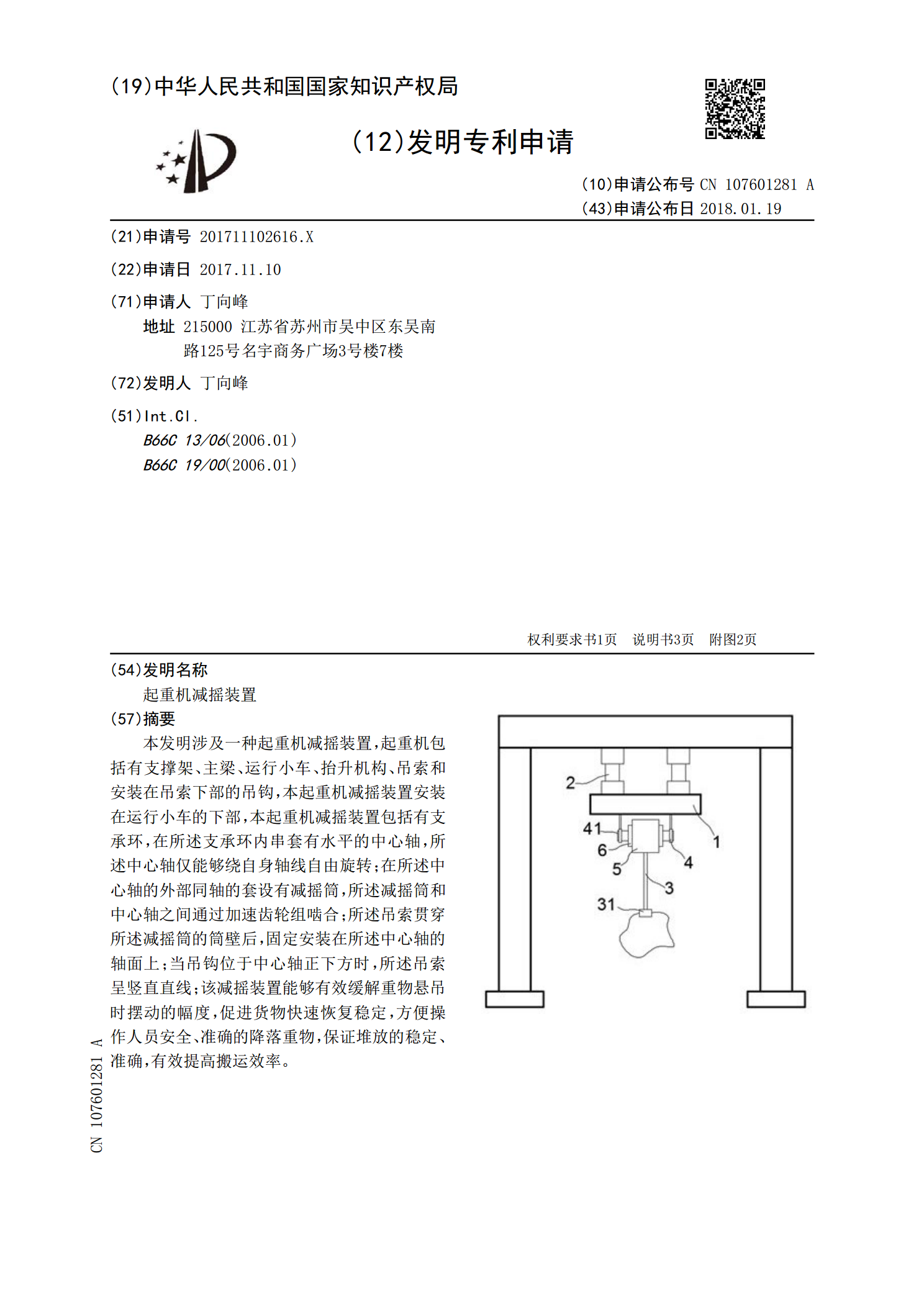
本发明涉及一种起重机减摇装置,起重机包括有支撑架、主梁、运行小车、抬升机构、吊索和安装在吊索下部的吊钩,本起重机减摇装置安装在运行小车的下部,本起重机减摇装置包括有支承环,在所述支承环内串套有水平的中心轴,所述中心轴仅能够绕自身轴线自由旋转;在所述中心轴的外部同轴的套设有减摇筒,所述减摇筒和中心轴之间通过加速齿轮组啮合;所述吊索贯穿所述减摇筒的筒壁后,固定安装在所述中心轴的轴面上;当吊钩位于中心轴正下方时,所述吊索呈竖直直线;该减摇装置能够有效缓解重物悬吊时摆动的幅度,促进货物快速恢复稳定,方便操作人员安
船用起重机可移动模块化减摇绞车及应用.pdf
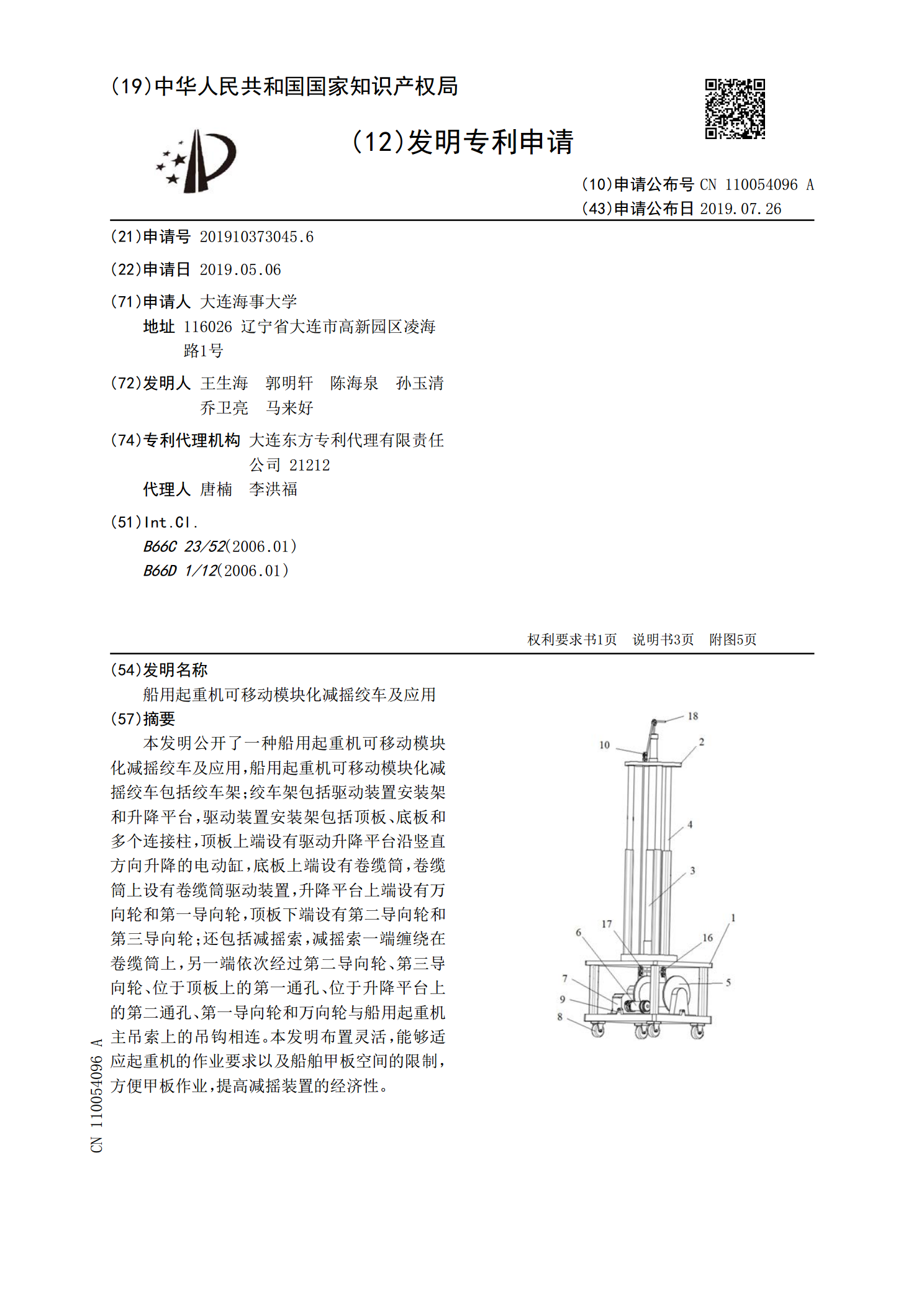
本发明公开了一种船用起重机可移动模块化减摇绞车及应用,船用起重机可移动模块化减摇绞车包括绞车架;绞车架包括驱动装置安装架和升降平台,驱动装置安装架包括顶板、底板和多个连接柱,顶板上端设有驱动升降平台沿竖直方向升降的电动缸,底板上端设有卷缆筒,卷缆筒上设有卷缆筒驱动装置,升降平台上端设有万向轮和第一导向轮,顶板下端设有第二导向轮和第三导向轮;还包括减摇索,减摇索一端缠绕在卷缆筒上,另一端依次经过第二导向轮、第三导向轮、位于顶板上的第一通孔、位于升降平台上的第二通孔、第一导向轮和万向轮与船用起重机主吊索上的吊