
一种水下机器人仿真展示系统及仿真方法.pdf

Ja****23


1/10
2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种水下机器人仿真展示系统及仿真方法.pdf
本发明涉及一种水下机器人仿真展示系统及其仿真方法,本水下机器人仿真展示系统包括:运动模型仿真部分和实景仿真部分,其中所述运动模型仿真部分适于模拟水下机器人运动;以及所述实景仿真部分适于模拟水下环境。所述运动模型仿真部分包括:指令交互模块、碰撞检测模块和动作关联模块,所述实景仿真部分包括:特效渲染模块、三维视角模块和DEMO播放模块。本发明能够使水下机器人在水下环境中对其工作动作、环境进行仿真展示,便于观察者能够清楚的观察水下机器人的状态,分析其运动过程,能够获得机器人足够的水下作业数据,以完善真实水下机器
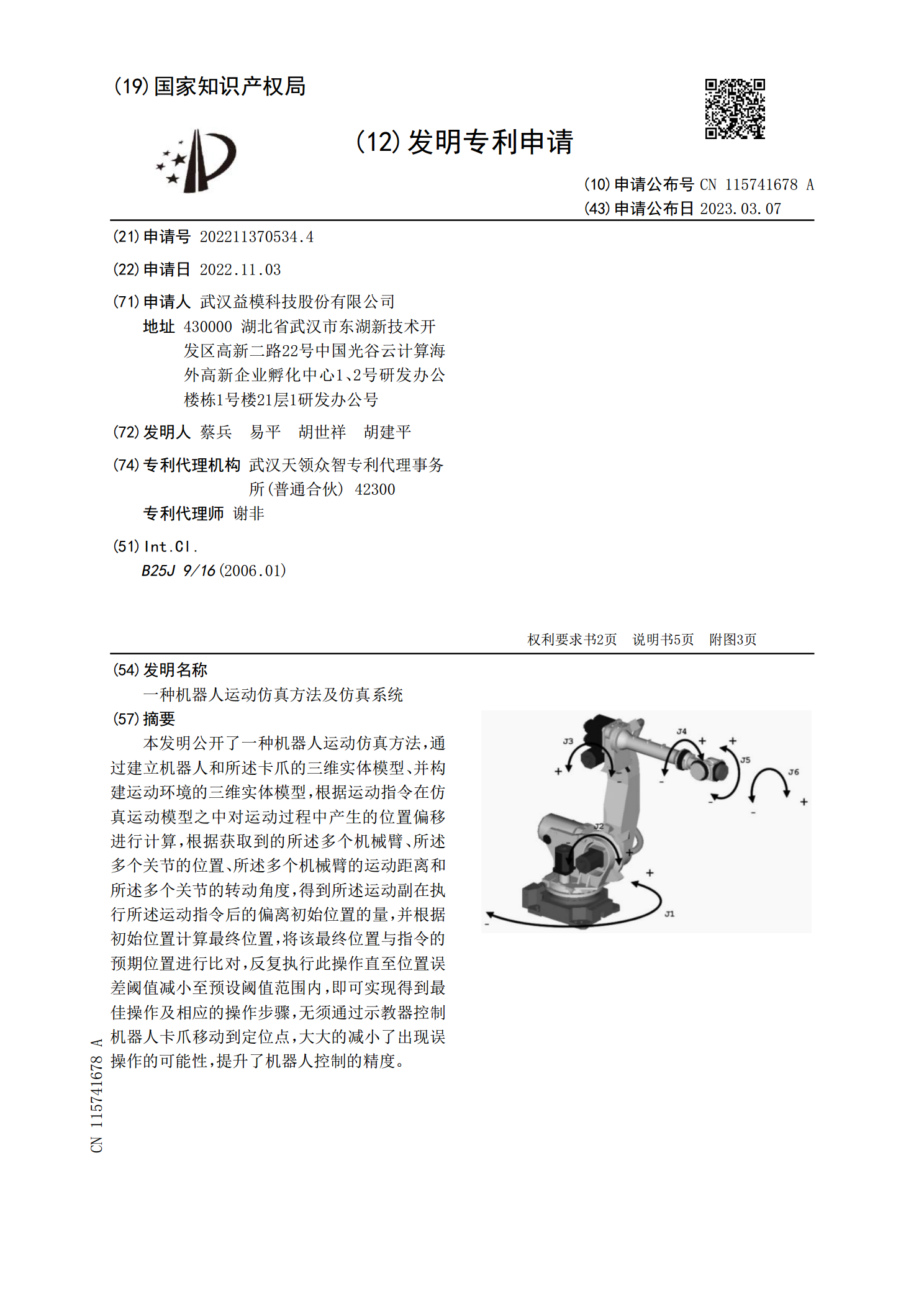
一种机器人运动仿真方法及仿真系统.pdf
本发明公开了一种机器人运动仿真方法,通过建立机器人和所述卡爪的三维实体模型、并构建运动环境的三维实体模型,根据运动指令在仿真运动模型之中对运动过程中产生的位置偏移进行计算,根据获取到的所述多个机械臂、所述多个关节的位置、所述多个机械臂的运动距离和所述多个关节的转动角度,得到所述运动副在执行所述运动指令后的偏离初始位置的量,并根据初始位置计算最终位置,将该最终位置与指令的预期位置进行比对,反复执行此操作直至位置误差阈值减小至预设阈值范围内,即可实现得到最佳操作及相应的操作步骤,无须通过示教器控制机器人卡爪移
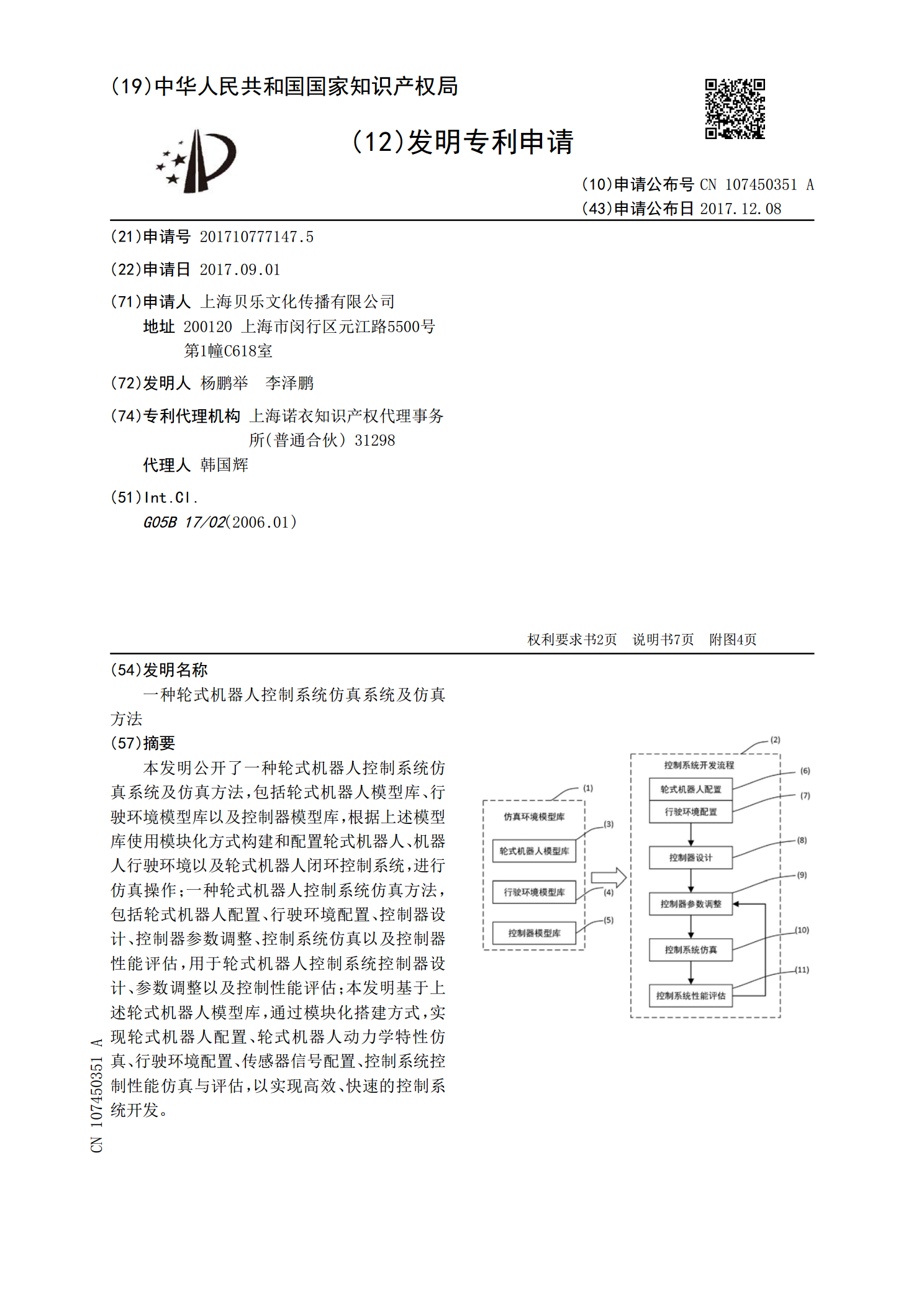
一种轮式机器人控制系统仿真系统及仿真方法.pdf
本发明公开了一种轮式机器人控制系统仿真系统及仿真方法,包括轮式机器人模型库、行驶环境模型库以及控制器模型库,根据上述模型库使用模块化方式构建和配置轮式机器人、机器人行驶环境以及轮式机器人闭环控制系统,进行仿真操作;一种轮式机器人控制系统仿真方法,包括轮式机器人配置、行驶环境配置、控制器设计、控制器参数调整、控制系统仿真以及控制器性能评估,用于轮式机器人控制系统控制器设计、参数调整以及控制性能评估;本发明基于上述轮式机器人模型库,通过模块化搭建方式,实现轮式机器人配置、轮式机器人动力学特性仿真、行驶环境配置

水下机器人协同仿真模型组合方法的研究.docx
水下机器人协同仿真模型组合方法的研究水下机器人是一种重要的工具,它们被广泛应用于许多领域,如海洋勘探、海洋科学研究和海洋保护等。然而,随着水下机器人的不断发展,如何设计和控制它们的任务变得越来越复杂。协同仿真是一种有效的方法,可以帮助设计师和控制者更好地理解和控制水下机器人的行为。在本文中,我们将讨论水下机器人协同仿真模型组合方法,重点考虑如何设计有效的模型,在模型间进行协同仿真,并将仿真结果与实际测试结果相比较。本文的主要贡献包括:1.介绍与协同仿真相关的基本概念和技术;2.提出水下机器人协同仿真模型组

柔性机器人水下运动的建模与仿真.docx
柔性机器人水下运动的建模与仿真柔性机器人与刚性机器人相比,柔性机器人具有可实现高速操作的能力、较高的负载自重比、较低的能耗和较低的生产成本以及具有更大的工作空间等优点。但是由于柔性机器人具有弹性变形,因此柔性机器人是一个非常复杂的动力学系统,其动力学方程具有高度非线性、强耦合以及时变等的特点。前期柔性机器人研究更多的是考虑如何消除或者主动控制由于高速轻质结构而产生的振动,而如何主动利用柔性机器人的结构柔性是最新研究的方向。本文以在水下环境利用结构柔性实现柔顺运动为研究对象,对柔性机器人水下运动进行了动力学