
一种人群运动仿真方法及系统.pdf

纪阳****公主


1/10

2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种人群运动仿真方法及系统.pdf
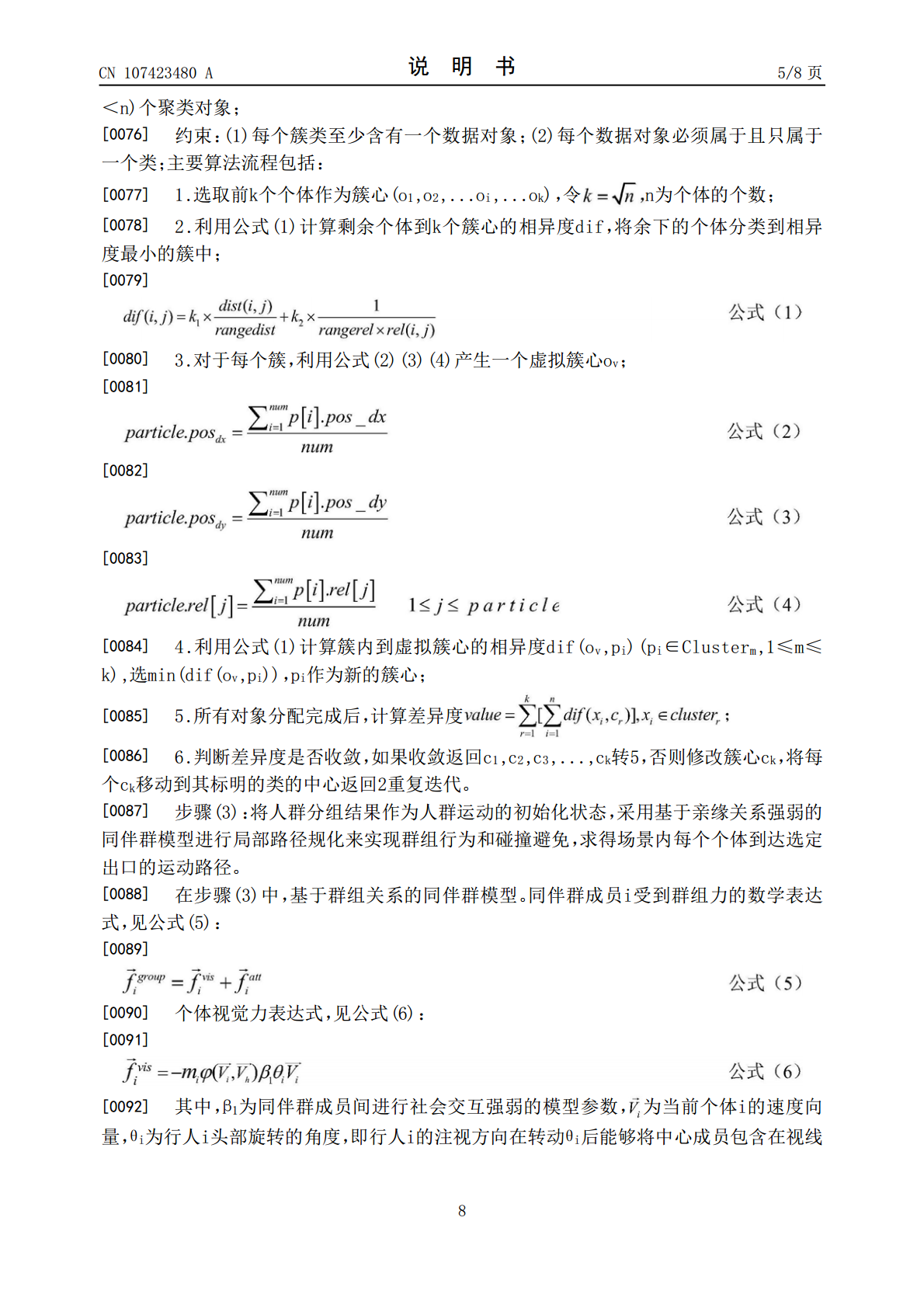
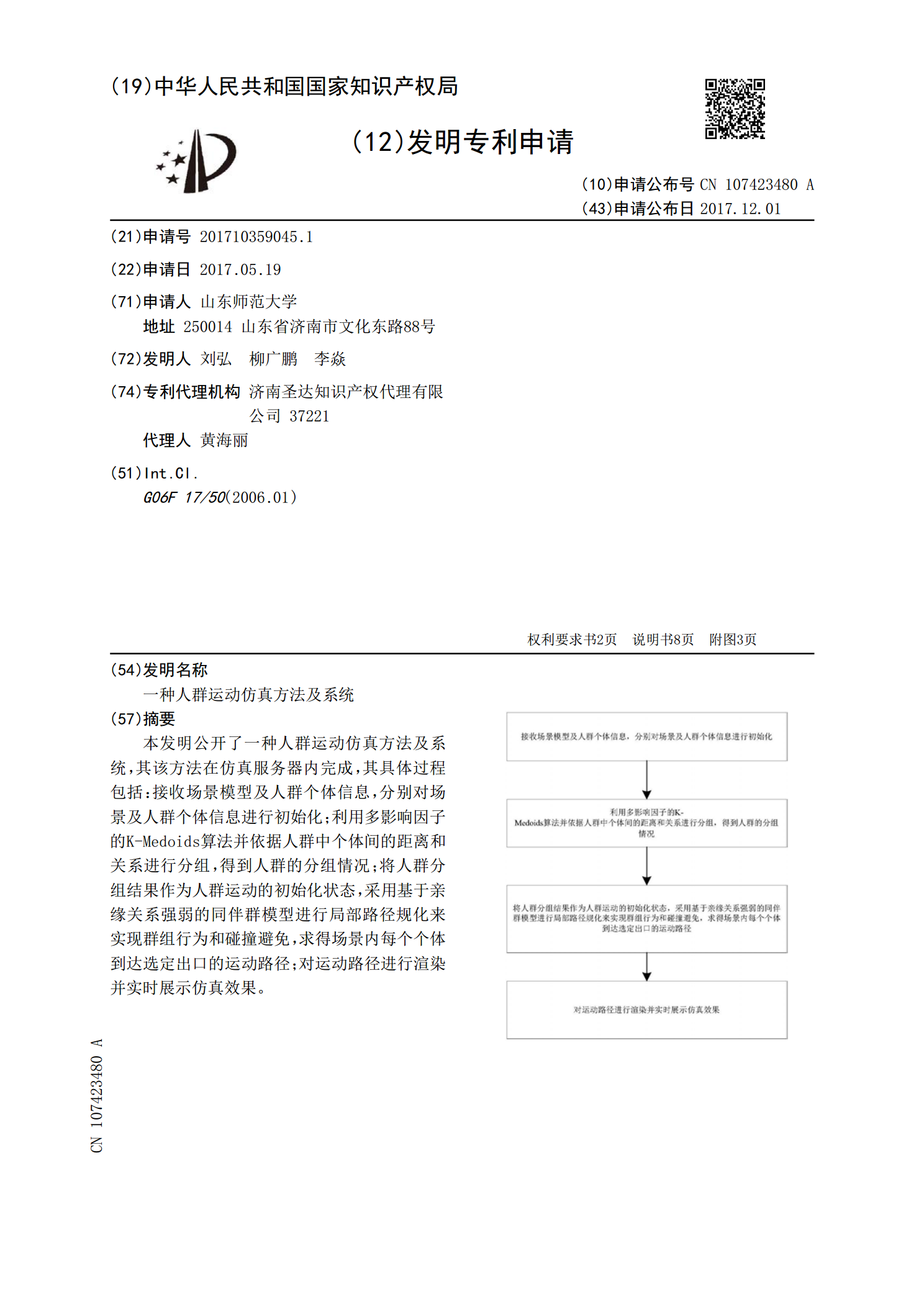
本发明公开了一种人群运动仿真方法及系统,其该方法在仿真服务器内完成,其具体过程包括:接收场景模型及人群个体信息,分别对场景及人群个体信息进行初始化;利用多影响因子的K‑Medoids算法并依据人群中个体间的距离和关系进行分组,得到人群的分组情况;将人群分组结果作为人群运动的初始化状态,采用基于亲缘关系强弱的同伴群模型进行局部路径规化来实现群组行为和碰撞避免,求得场景内每个个体到达选定出口的运动路径;对运动路径进行渲染并实时展示仿真效果。
一种人群运动仿真框架的构建方法及装置.pdf
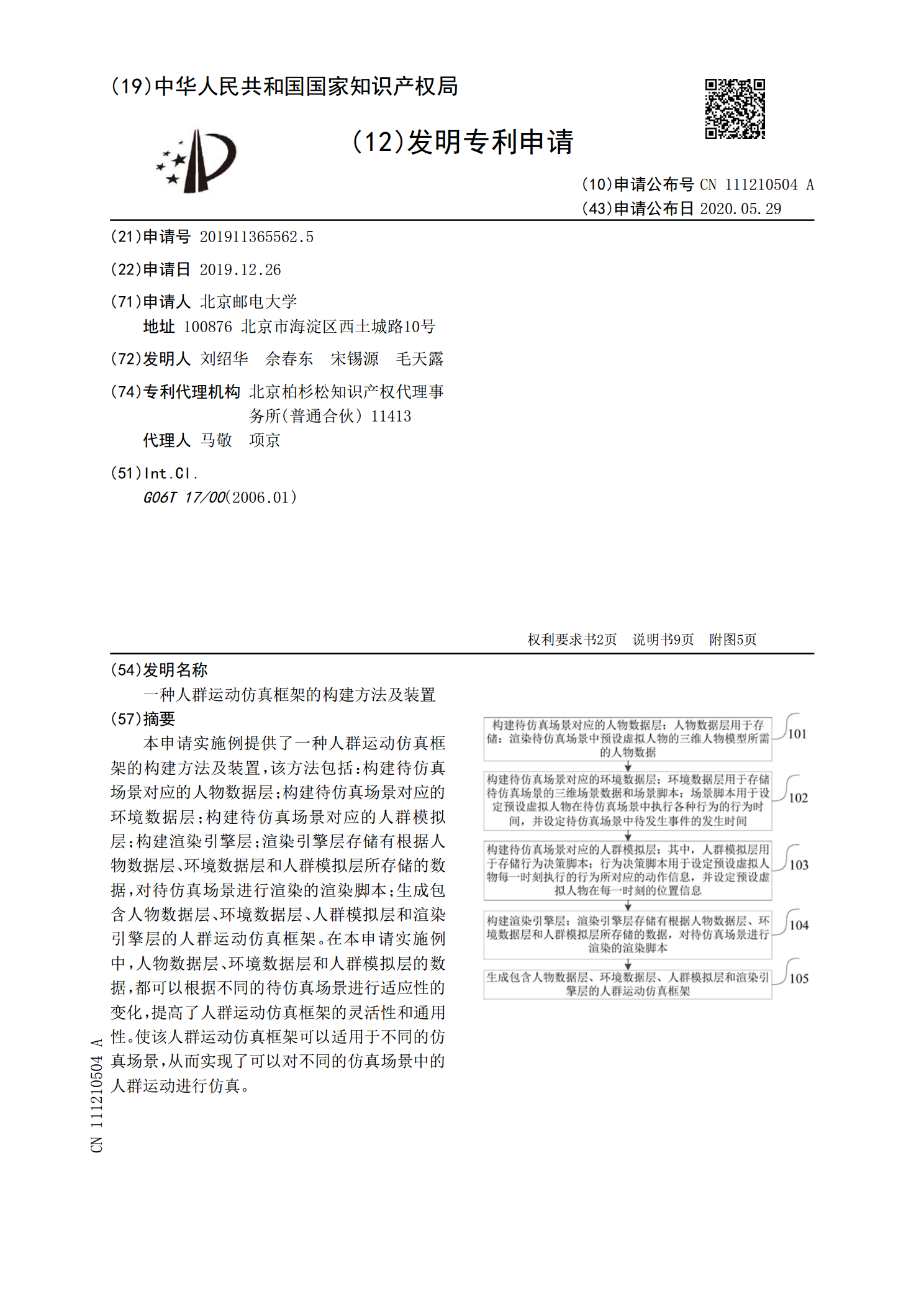
本申请实施例提供了一种人群运动仿真框架的构建方法及装置,该方法包括:构建待仿真场景对应的人物数据层;构建待仿真场景对应的环境数据层;构建待仿真场景对应的人群模拟层;构建渲染引擎层;渲染引擎层存储有根据人物数据层、环境数据层和人群模拟层所存储的数据,对待仿真场景进行渲染的渲染脚本;生成包含人物数据层、环境数据层、人群模拟层和渲染引擎层的人群运动仿真框架。在本申请实施例中,人物数据层、环境数据层和人群模拟层的数据,都可以根据不同的待仿真场景进行适应性的变化,提高了人群运动仿真框架的灵活性和通用性。使该人群运动
一种基于故事板的人群运动仿真方法.pdf
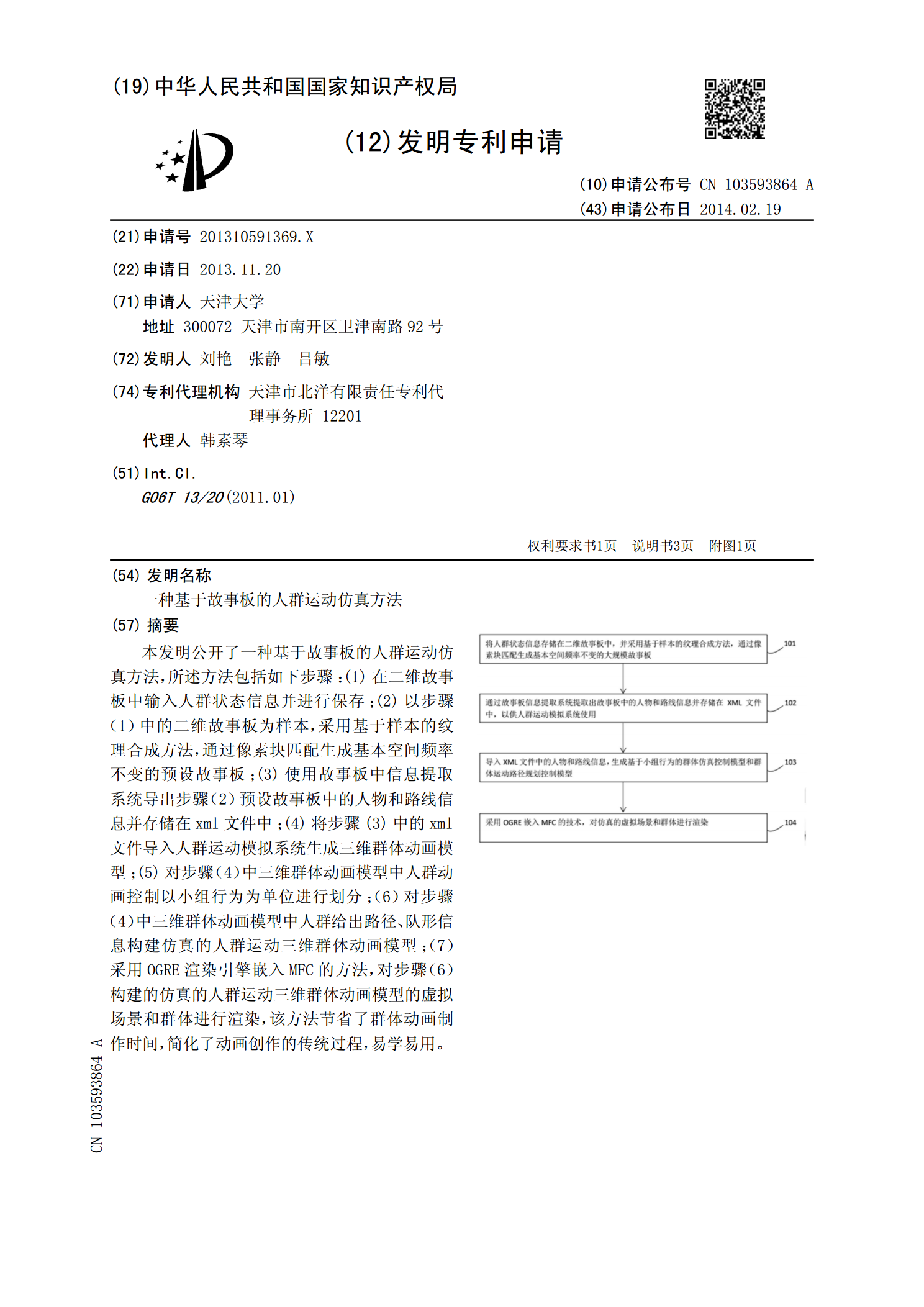
本发明公开了一种基于故事板的人群运动仿真方法,所述方法包括如下步骤:(1)在二维故事板中输入人群状态信息并进行保存;(2)以步骤(1)中的二维故事板为样本,采用基于样本的纹理合成方法,通过像素块匹配生成基本空间频率不变的预设故事板;(3)使用故事板中信息提取系统导出步骤(2)预设故事板中的人物和路线信息并存储在xml文件中;(4)将步骤(3)中的xml文件导入人群运动模拟系统生成三维群体动画模型;(5)对步骤(4)中三维群体动画模型中人群动画控制以小组行为为单位进行划分;(6)对步骤(4)中三维群体动画模
一种基于路径规划的人群疏散仿真方法及系统.pdf
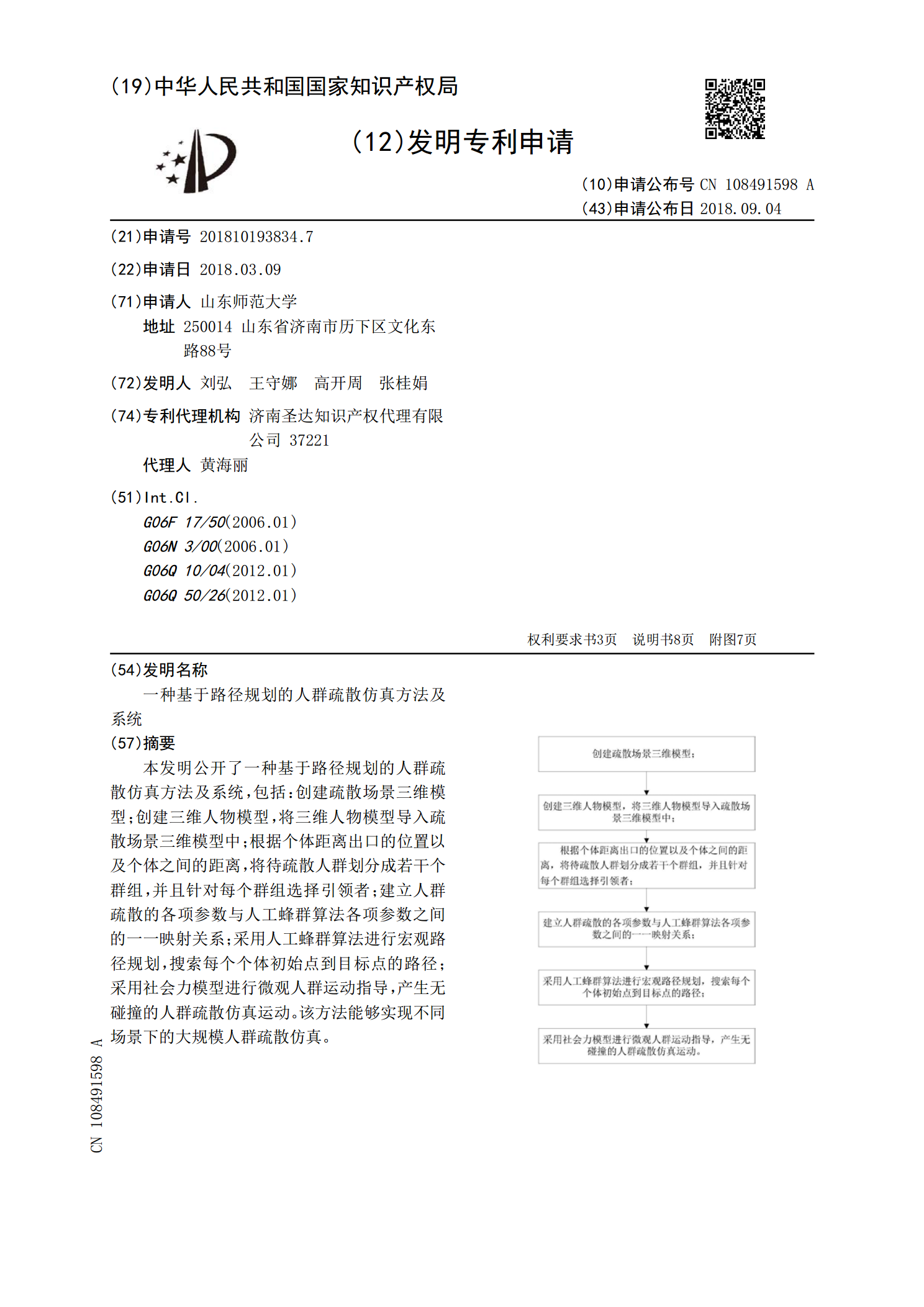
本发明公开了一种基于路径规划的人群疏散仿真方法及系统,包括:创建疏散场景三维模型;创建三维人物模型,将三维人物模型导入疏散场景三维模型中;根据个体距离出口的位置以及个体之间的距离,将待疏散人群划分成若干个群组,并且针对每个群组选择引领者;建立人群疏散的各项参数与人工蜂群算法各项参数之间的一一映射关系;采用人工蜂群算法进行宏观路径规划,搜索每个个体初始点到目标点的路径;采用社会力模型进行微观人群运动指导,产生无碰撞的人群疏散仿真运动。该方法能够实现不同场景下的大规模人群疏散仿真。
一种基于多蜂群算法的人群疏散仿真方法及系统.pdf
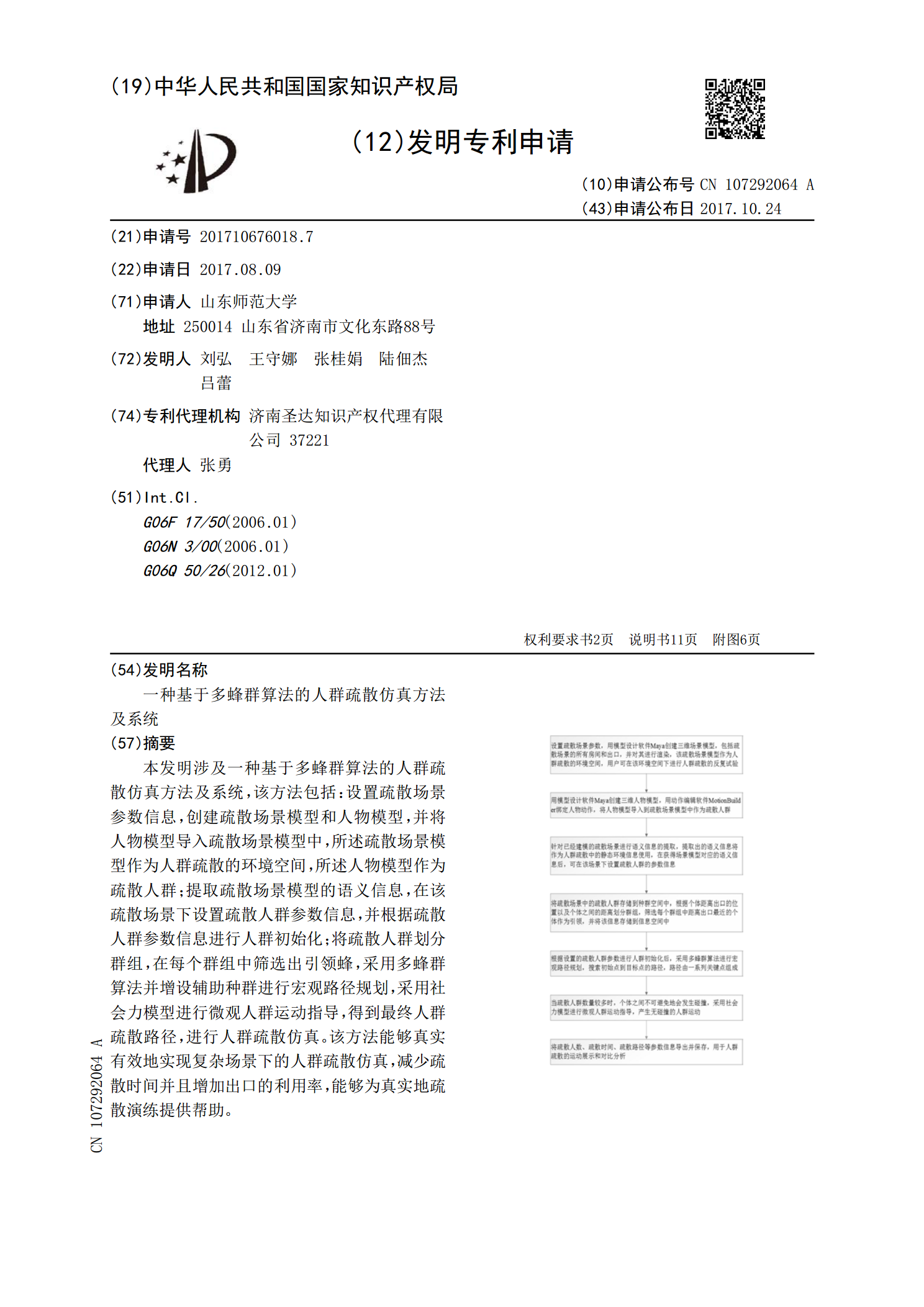
本发明涉及一种基于多蜂群算法的人群疏散仿真方法及系统,该方法包括:设置疏散场景参数信息,创建疏散场景模型和人物模型,并将人物模型导入疏散场景模型中,所述疏散场景模型作为人群疏散的环境空间,所述人物模型作为疏散人群;提取疏散场景模型的语义信息,在该疏散场景下设置疏散人群参数信息,并根据疏散人群参数信息进行人群初始化;将疏散人群划分群组,在每个群组中筛选出引领蜂,采用多蜂群算法并增设辅助种群进行宏观路径规划,采用社会力模型进行微观人群运动指导,得到最终人群疏散路径,进行人群疏散仿真。该方法能够真实有效地实现复