
一种全向移动的自适应调平机器人及其操作方法.pdf

努力****凌芹


1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全向移动的自适应调平机器人及其操作方法.pdf
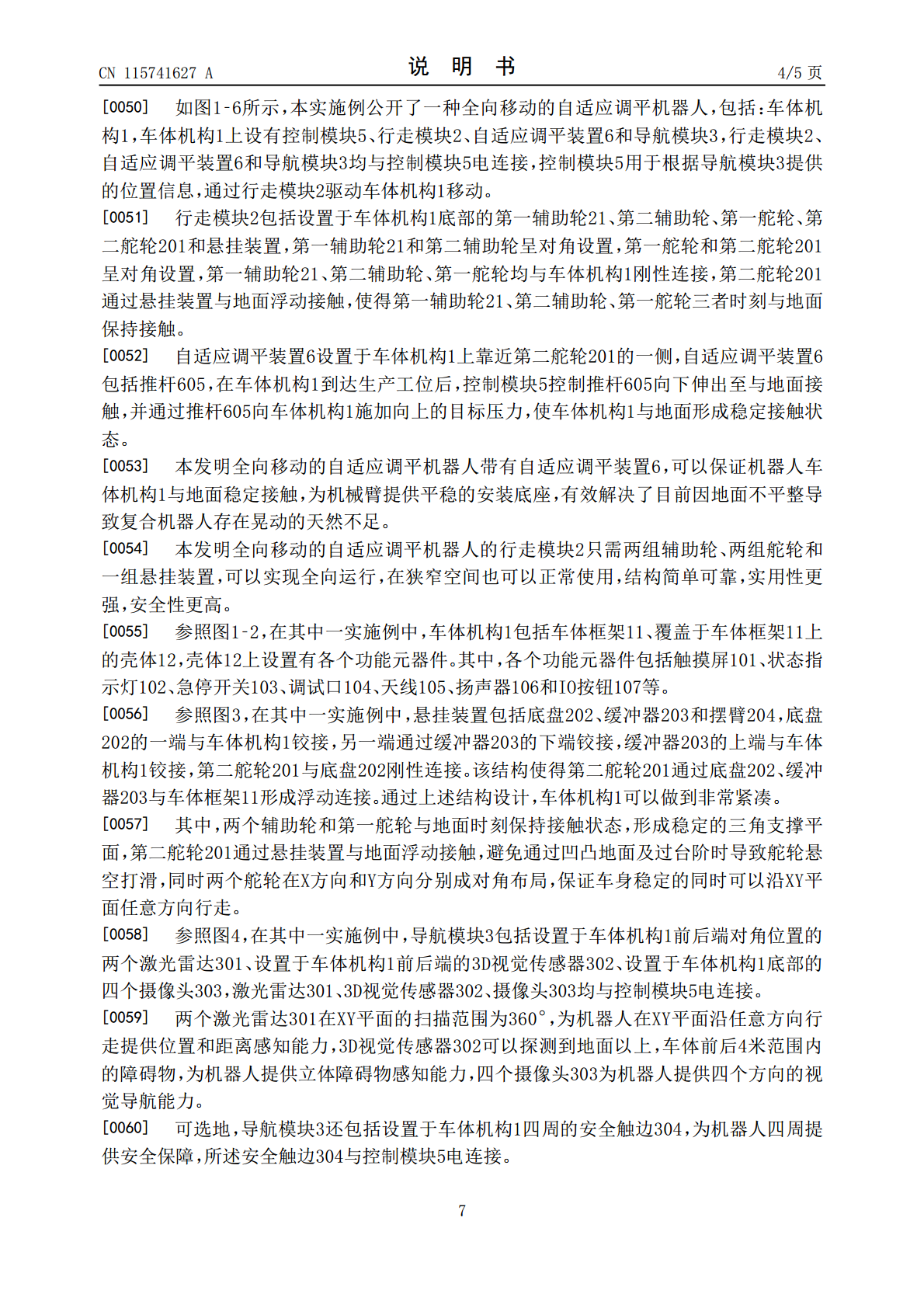
本发明公开了一种全向移动的自适应调平机器人及其操作方法,全向移动的自适应调平机器人包括车体机构,车体机构上设有控制模块、行走模块、自适应调平装置和导航模块,行走模块、自适应调平装置和导航模块均与控制模块电连接,控制模块用于根据导航模块提供的位置信息,通过行走模块驱动车体机构移动。本发明全向移动的自适应调平机器人带有自适应调平装置,可以保证机器人车体与地面稳定接触,为机械臂提供平稳的安装底座,有效解决了目前因地面不平整导致复合机器人存在晃动的天然不足。其中,行走模块只需两组辅助轮、两组舵轮和一组悬挂装置,可
一种视觉引导的全向移动双臂机器人及其全向移动方法.pdf
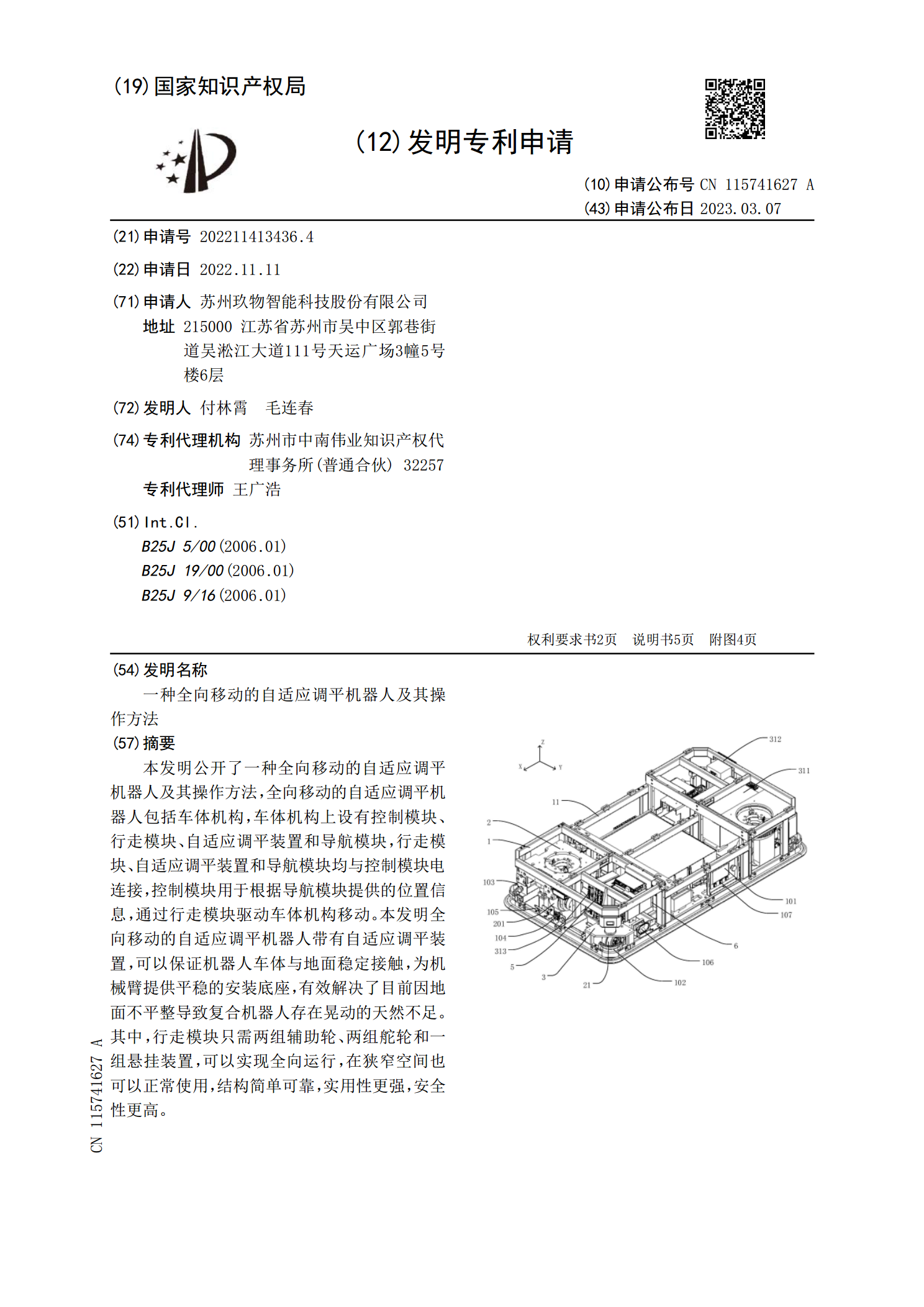
本发明公开了一种视觉引导的全向移动双臂机器人及其全向移动方法,全向移动双臂机器人包含车体、上位机、支撑骨架、深度摄像头、第一至第四超声波传感器模块、以及第一至第二机械臂;上位机和支撑骨架均固定在车体上;深度摄像头、第一至第二机械臂均设置在支撑骨架上;深度摄像头和上位机电气相连;车体包含底盘、车盖、第一至第四直流电机、第一至第四电机驱动模块、第一至第四联轴器、第一至第四全向轮、下位机和蓝牙模块。本发明增大了机器人的工作空间范围,提高了其灵活性,具有较大的实用价值。
全向移动底盘及其调平方法.pdf
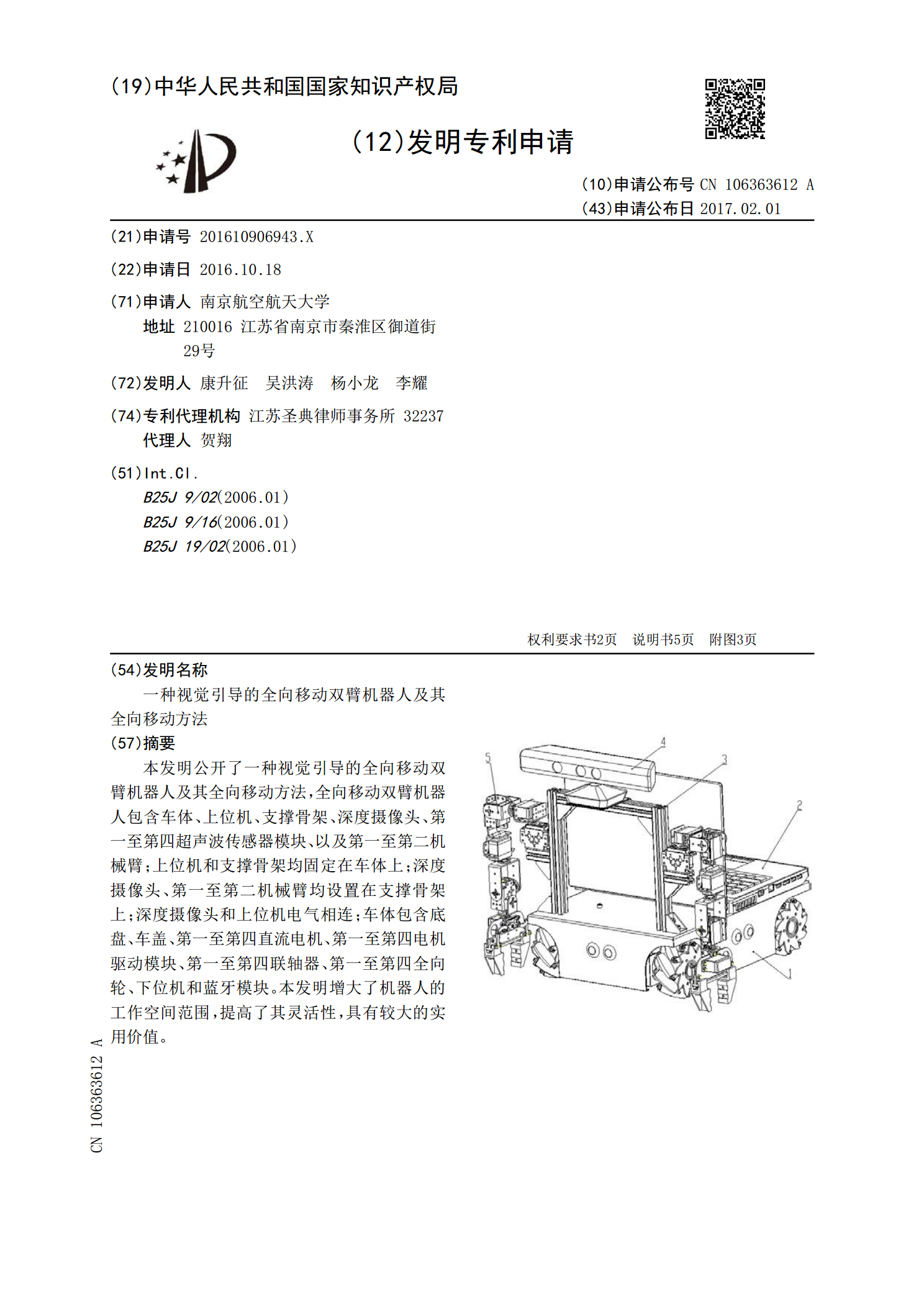
本发明公开了一种全向移动底盘,包括框架、驱动系统和控制系统,框架上设有至少三个全向轮,其中至多两个全向轮固定连接于所述框架,其余所有全向轮均连接有支架,支架的一端铰接在框架上,支架的另一端通过调节部件连接在框架上,调节部件能够调节与其连接的支架另一端相对框架上下运动,驱动系统连接每个全向轮,控制系统控制驱动系统带动全向轮转动。运用该底盘,调节部件能够上下调节支架,即上下调节全向轮的位置,使所有全向轮始终位于一个平面内,保证全向轮相对地面的正压力相同,即全向轮相对地面的摩擦力相同,使全向轮的合速度方向与程序
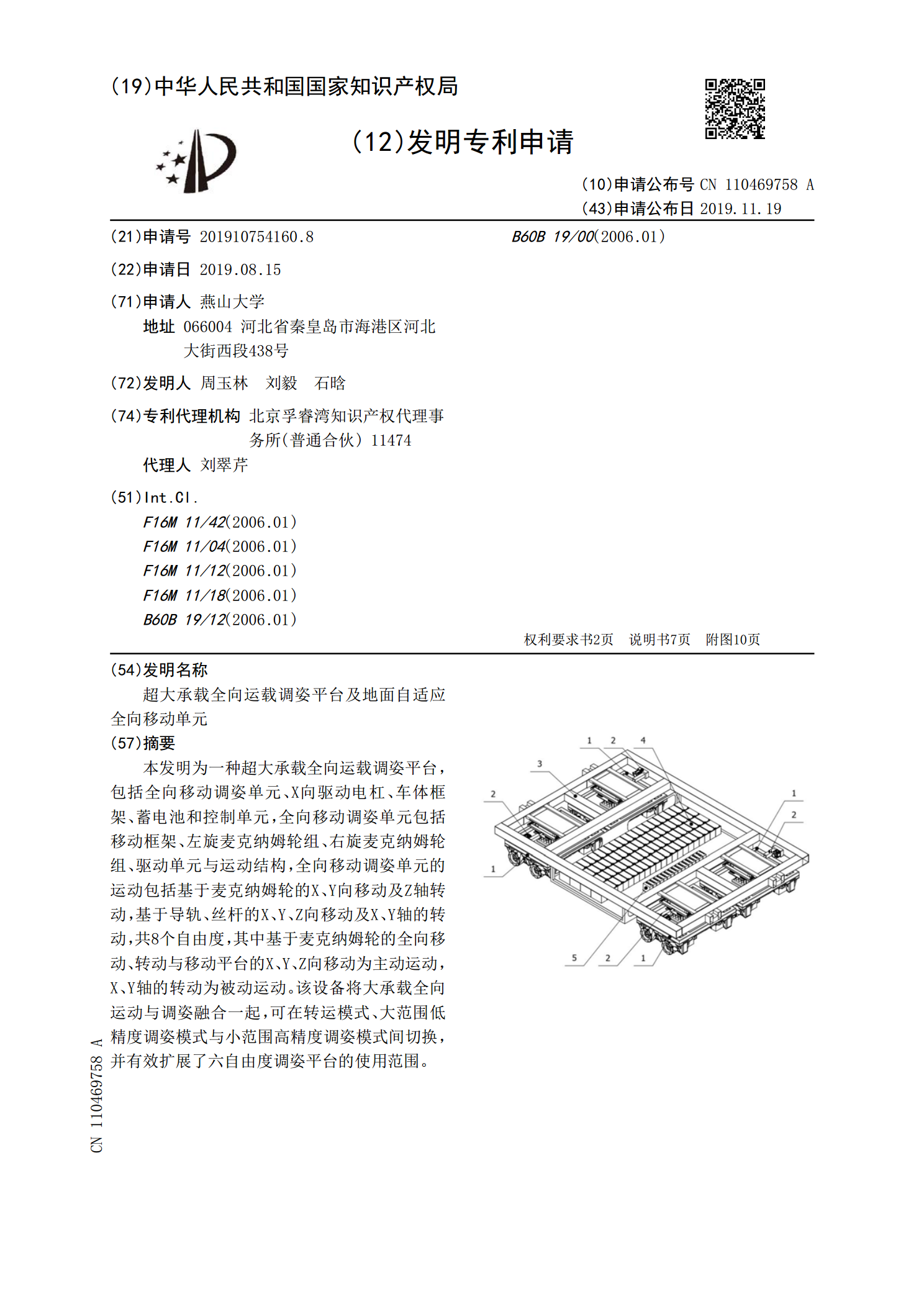
超大承载全向运载调姿平台及地面自适应全向移动单元.pdf
本发明为一种超大承载全向运载调姿平台,包括全向移动调姿单元、X向驱动电杠、车体框架、蓄电池和控制单元,全向移动调姿单元包括移动框架、左旋麦克纳姆轮组、右旋麦克纳姆轮组、驱动单元与运动结构,全向移动调姿单元的运动包括基于麦克纳姆轮的X、Y向移动及Z轴转动,基于导轨、丝杆的X、Y、Z向移动及X、Y轴的转动,共8个自由度,其中基于麦克纳姆轮的全向移动、转动与移动平台的X、Y、Z向移动为主动运动,X、Y轴的转动为被动运动。该设备将大承载全向运动与调姿融合一起,可在转运模式、大范围低精度调姿模式与小范围高精度调姿模
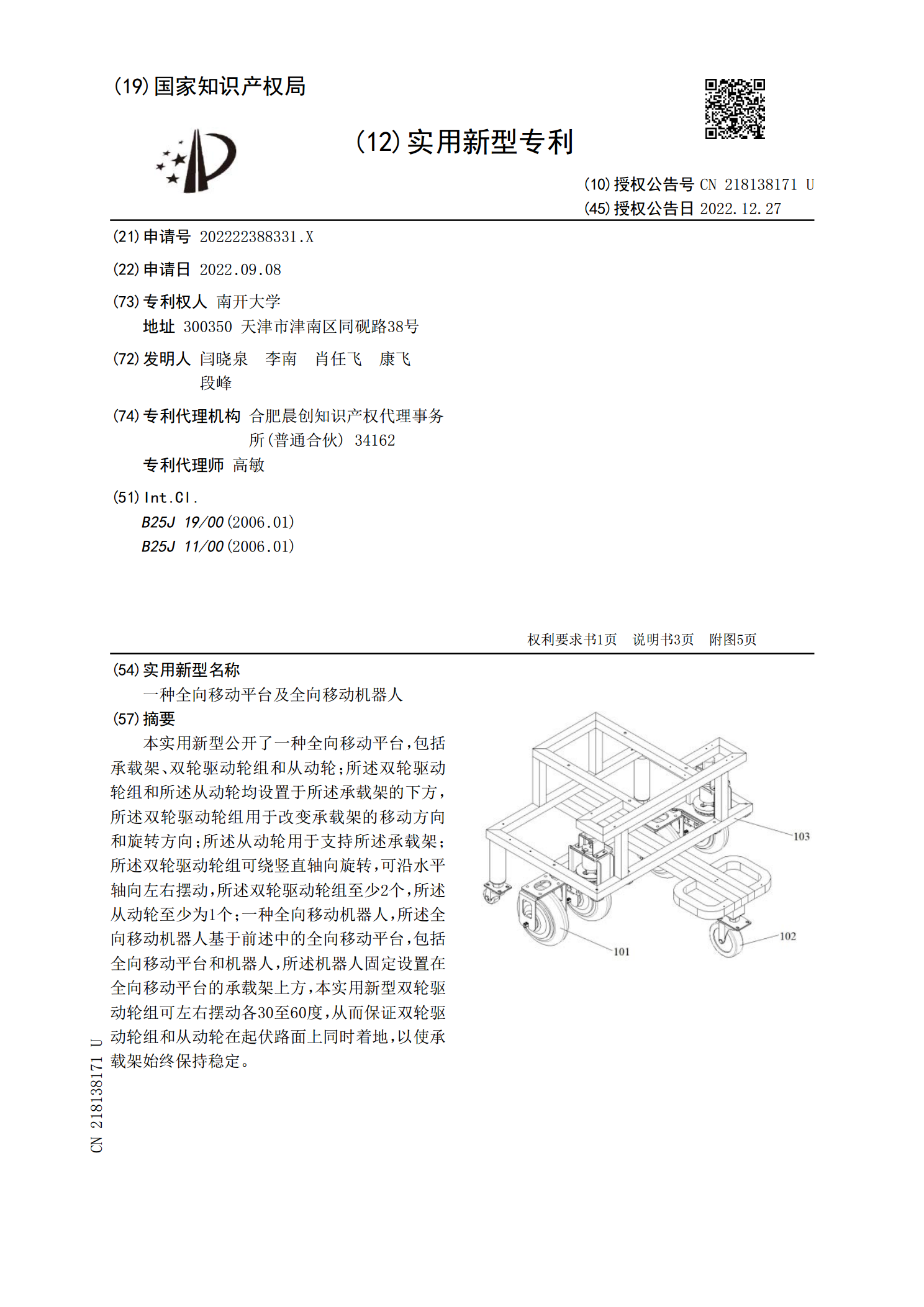
一种全向移动平台及全向移动机器人.pdf
本实用新型公开了一种全向移动平台,包括承载架、双轮驱动轮组和从动轮;所述双轮驱动轮组和所述从动轮均设置于所述承载架的下方,所述双轮驱动轮组用于改变承载架的移动方向和旋转方向;所述从动轮用于支持所述承载架;所述双轮驱动轮组可绕竖直轴向旋转,可沿水平轴向左右摆动,所述双轮驱动轮组至少2个,所述从动轮至少为1个;一种全向移动机器人,所述全向移动机器人基于前述中的全向移动平台,包括全向移动平台和机器人,所述机器人固定设置在全向移动平台的承载架上方,本实用新型双轮驱动轮组可左右摆动各30至60度,从而保证双轮驱动轮