
一种铁路轨道姿态测量方法、装置及作业系统.pdf

绮兰****文章

1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种铁路轨道姿态测量方法、装置及作业系统.pdf
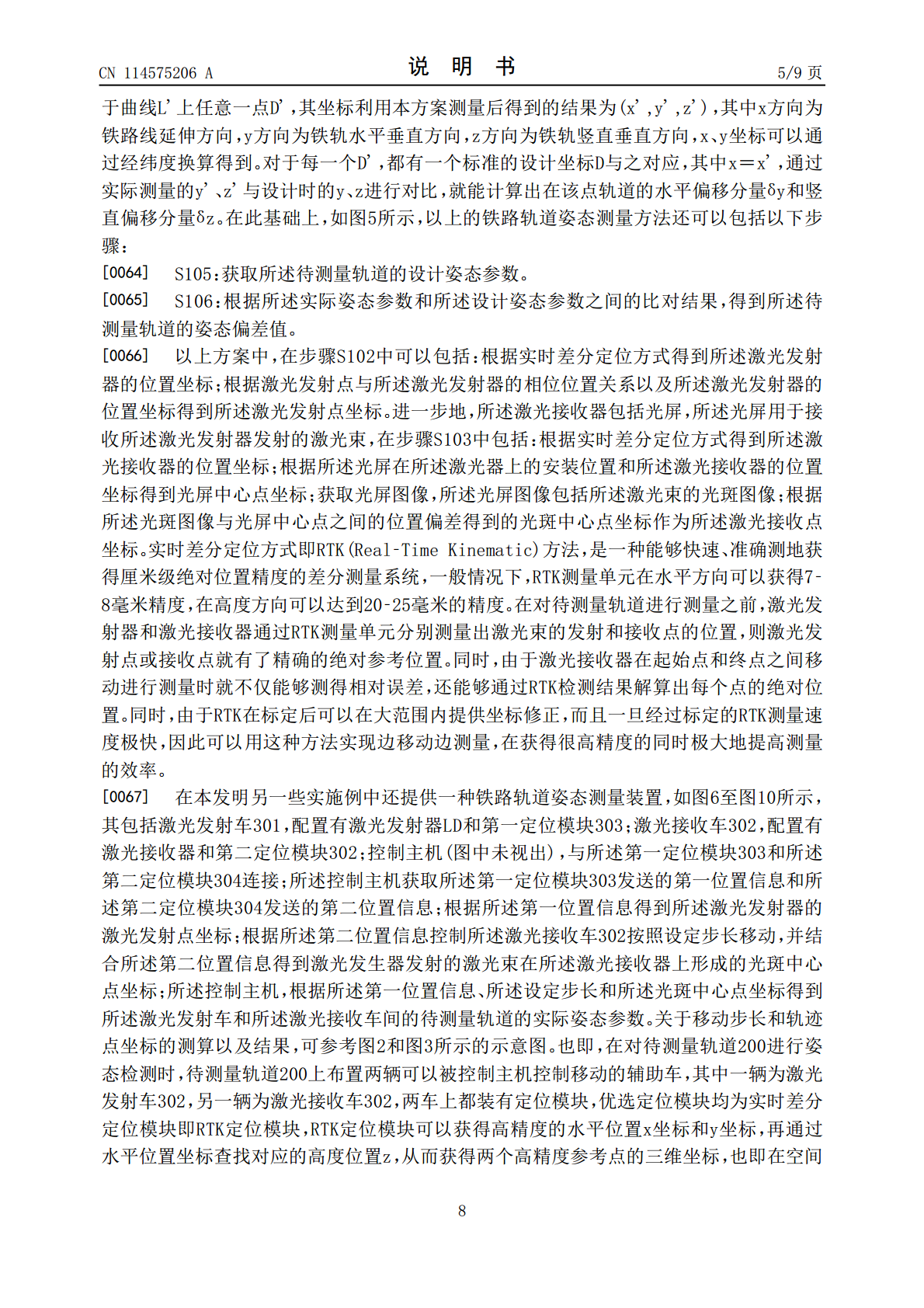
本发明提供一种铁路轨道姿态测量方法、装置及作业系统,在待测量轨道的起点位置设置用于发射激光束的激光发射器,在待测量轨道的目标位置设置接收激光束的激光接收器。激光接收器能够沿着待测量轨道按照设定步长移动。激光接收器每移动一次,均能够对激光接收点坐标进行检测,相当于能够获得激光接收器移动路径上的多个位置坐标,即待测量轨道的轨迹点坐标,利用激光的直线传播特性以及激光发射的发射点坐标和每一个轨迹点坐标就能够得到待测量轨道的实际姿态参数。本发明对于铁路轨道姿态的测量方案无需人工干预,降低了安全风险,而且自动化检测技

轨道检测系统所在构架的运动姿态测量方法及装置.pdf
本发明公开了一种轨道检测系统所在构架的运动姿态测量方法及装置,其中该方法包括:获取多个三轴加速度计所采集的构架运动加速度数据;所述多个三轴加速度计,对称安装于轨道检测系统所在轨道检测车辆的构架的左右两侧;所述左右两侧为平行于车辆行进方向的车身两侧;针对每一三轴加速度计,根据该三轴加速度计所采集的加速度数据,计算该三轴加速度计的三轴位移数据;对多个三轴加速度计的三轴位移数据,进行解算处理,得到轨道检测系统所在构架几何中心的运动姿态测量数据;所述构架几何中心的运动姿态测量数据,包括构架几何中心的位移量和转角量

一种姿态测量方法和装置.pdf
本发明提供一种姿态测量方法和装置,加载目标模型,还包括:接收至少两帧目标图像,并提取每一帧目标图像中的目标轮廓序列;获取所述目标模型的目标投影图像,并提取所述目标投影图像中的模拟目标轮廓序列;循环执行N1至N3,直至所述每一帧目标图像对应的目标姿态均被确定:N1:将当前模拟目标轮廓序列与当前帧的目标轮廓序列进行匹配;N2:确定匹配后的模拟目标轮廓序列对应的目标模型姿态为目标姿态;N3:判断当前帧是否为最后一帧,如果否,则将当前帧对应的目标姿态作为下一帧的模拟目标轮廓序列的初始姿态,并将下一帧作为当前帧,执
一种铁路轨道轮轨力的测量方法及装置.pdf
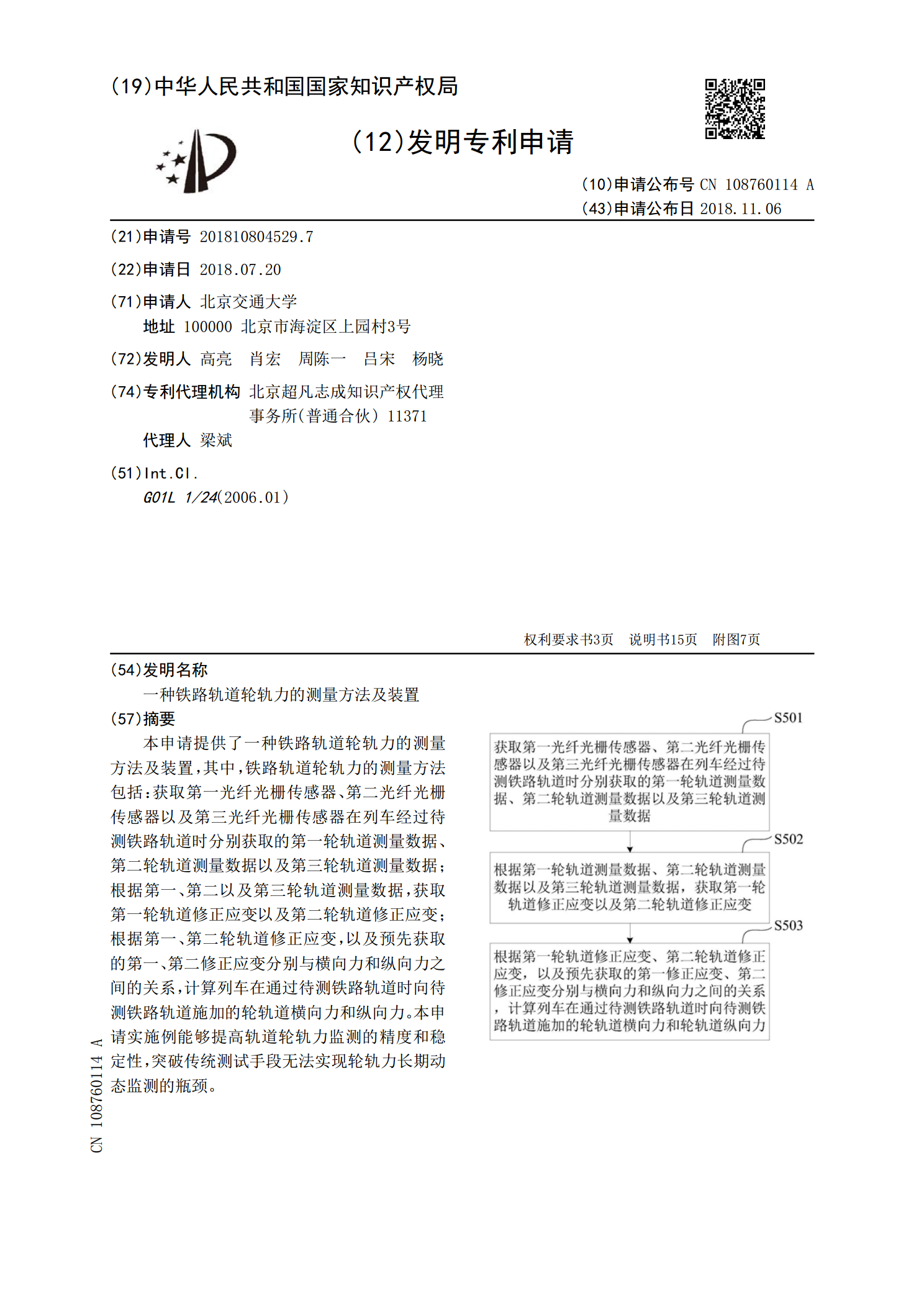
本申请提供了一种铁路轨道轮轨力的测量方法及装置,其中,铁路轨道轮轨力的测量方法包括:获取第一光纤光栅传感器、第二光纤光栅传感器以及第三光纤光栅传感器在列车经过待测铁路轨道时分别获取的第一轮轨道测量数据、第二轮轨道测量数据以及第三轮轨道测量数据;根据第一、第二以及第三轮轨道测量数据,获取第一轮轨道修正应变以及第二轮轨道修正应变;根据第一、第二轮轨道修正应变,以及预先获取的第一、第二修正应变分别与横向力和纵向力之间的关系,计算列车在通过待测铁路轨道时向待测铁路轨道施加的轮轨道横向力和纵向力。本申请实施例能够提
姿态测量方法及装置.pdf
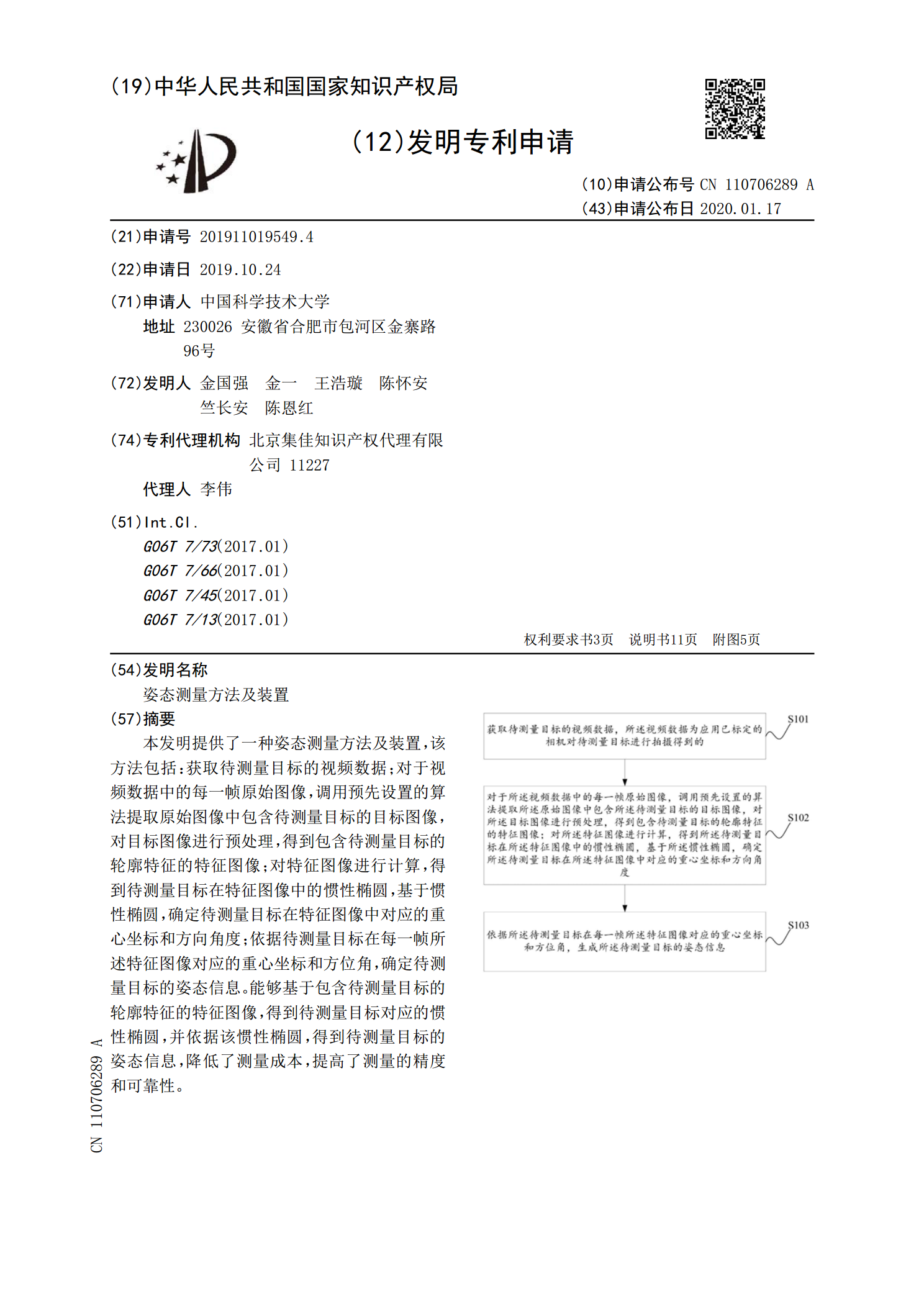
本发明提供了一种姿态测量方法及装置,该方法包括:获取待测量目标的视频数据;对于视频数据中的每一帧原始图像,调用预先设置的算法提取原始图像中包含待测量目标的目标图像,对目标图像进行预处理,得到包含待测量目标的轮廓特征的特征图像;对特征图像进行计算,得到待测量目标在特征图像中的惯性椭圆,基于惯性椭圆,确定待测量目标在特征图像中对应的重心坐标和方向角度;依据待测量目标在每一帧所述特征图像对应的重心坐标和方位角,确定待测量目标的姿态信息。能够基于包含待测量目标的轮廓特征的特征图像,得到待测量目标对应的惯性椭圆,并