
一种基于避障系统的消防无人机航迹规划方法.pdf

一吃****天材

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于避障系统的消防无人机航迹规划方法.pdf
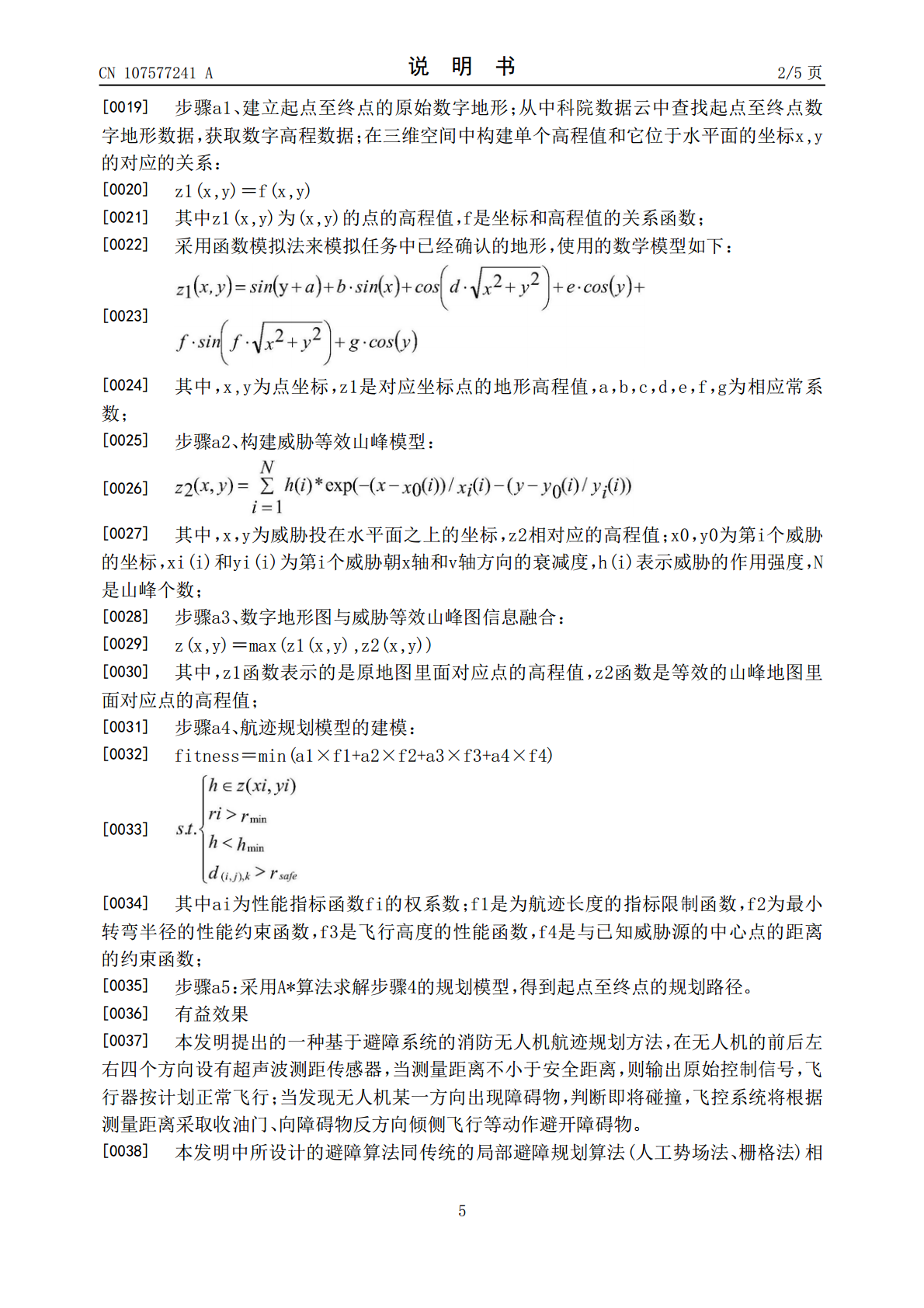
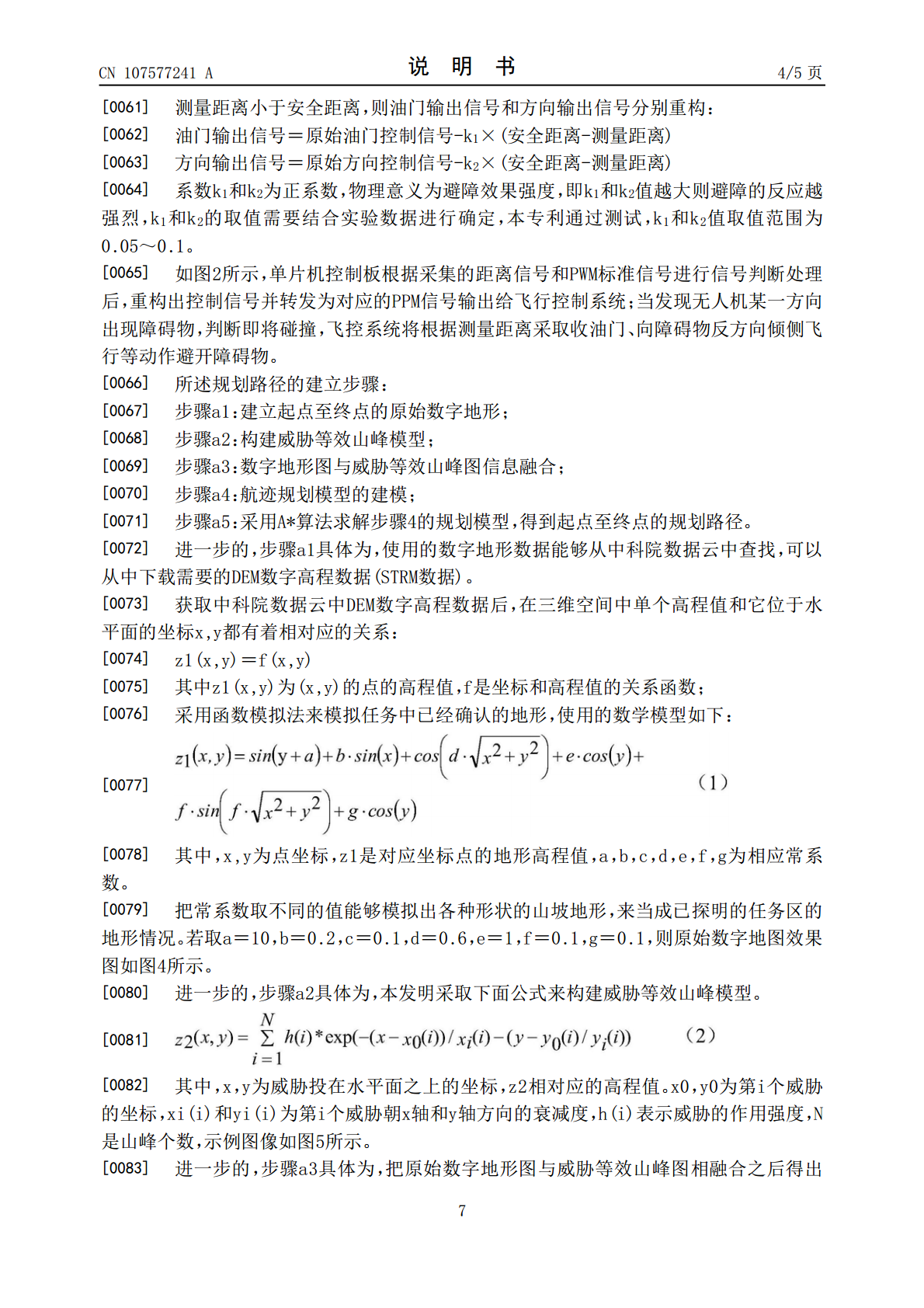
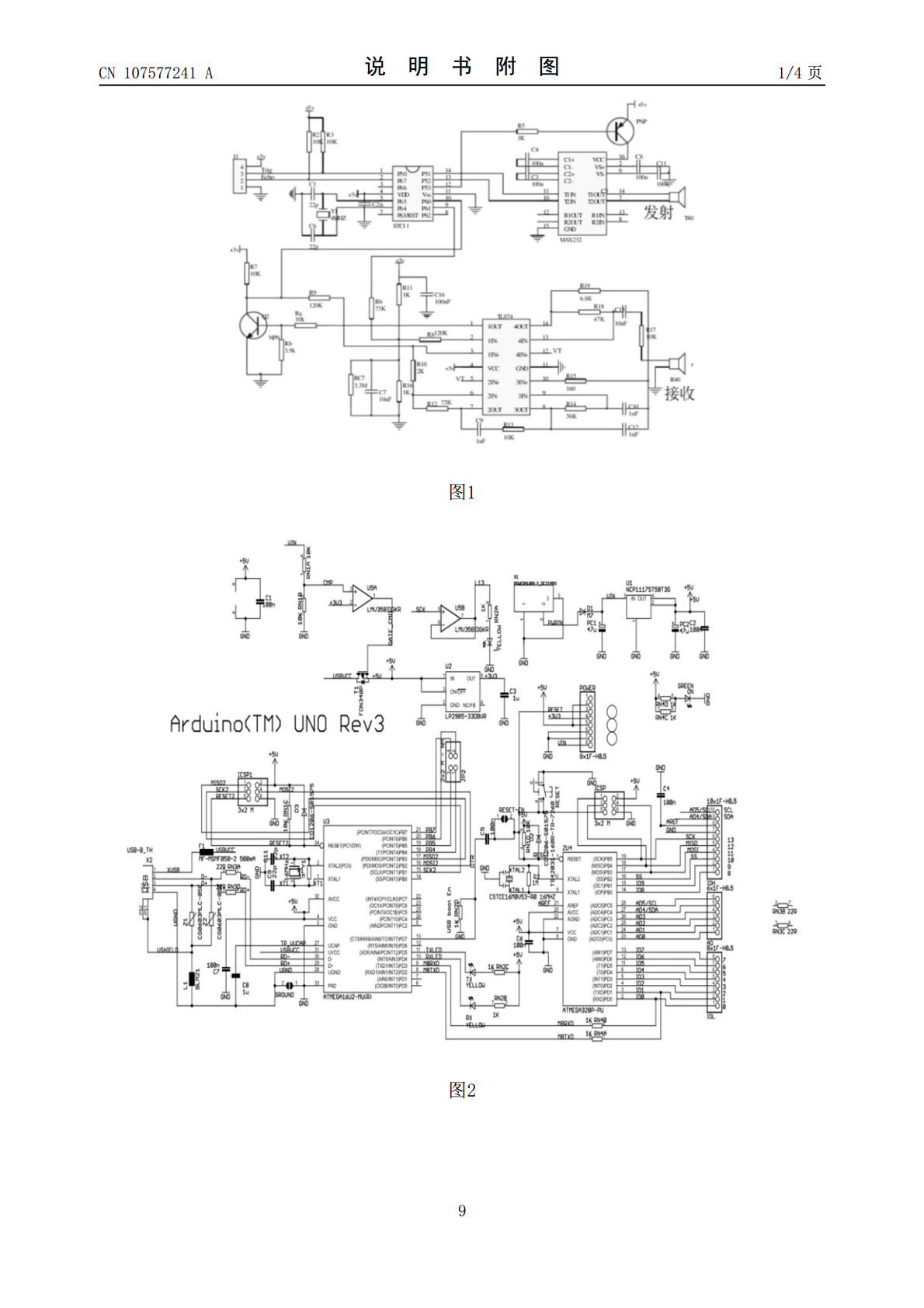
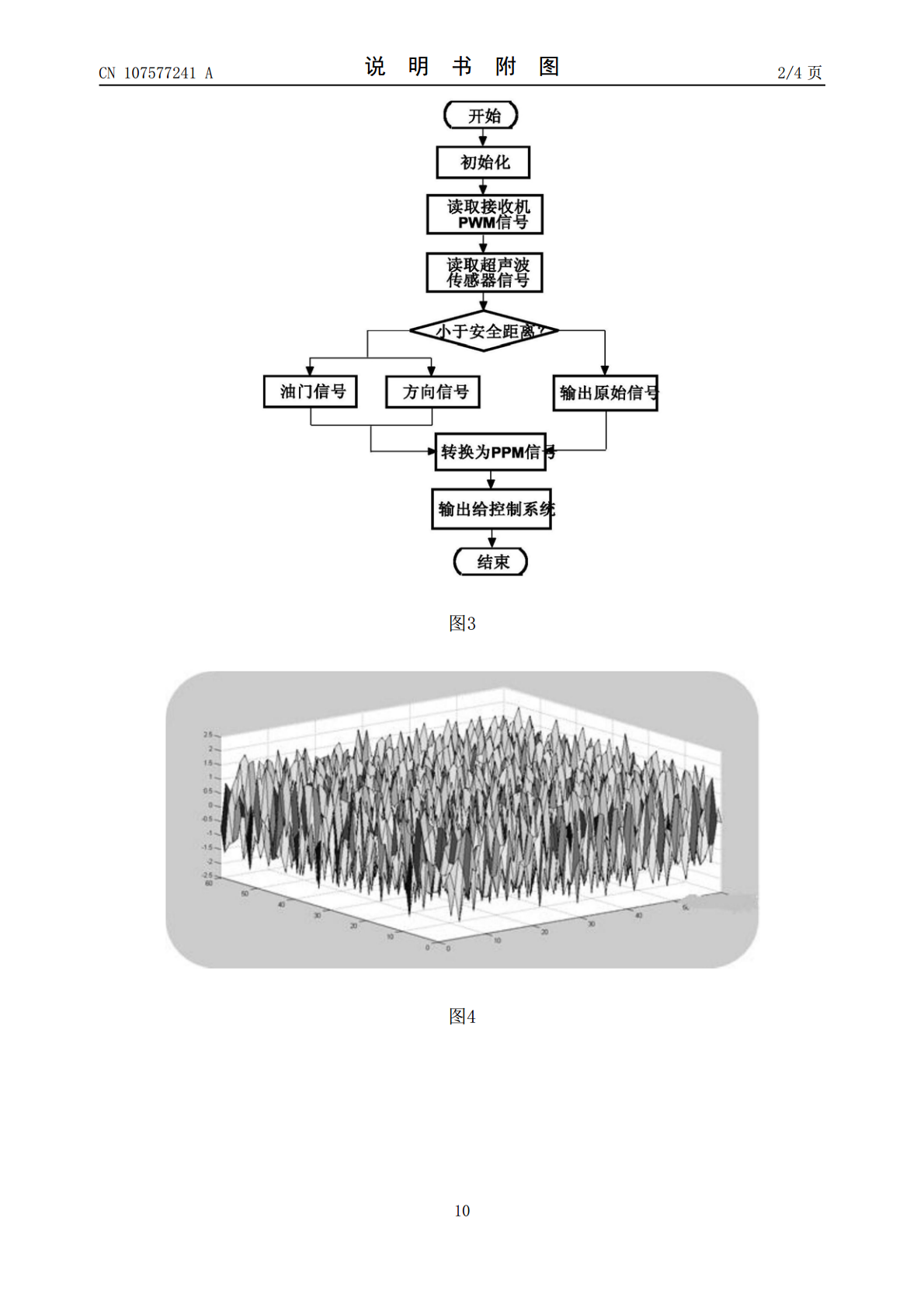
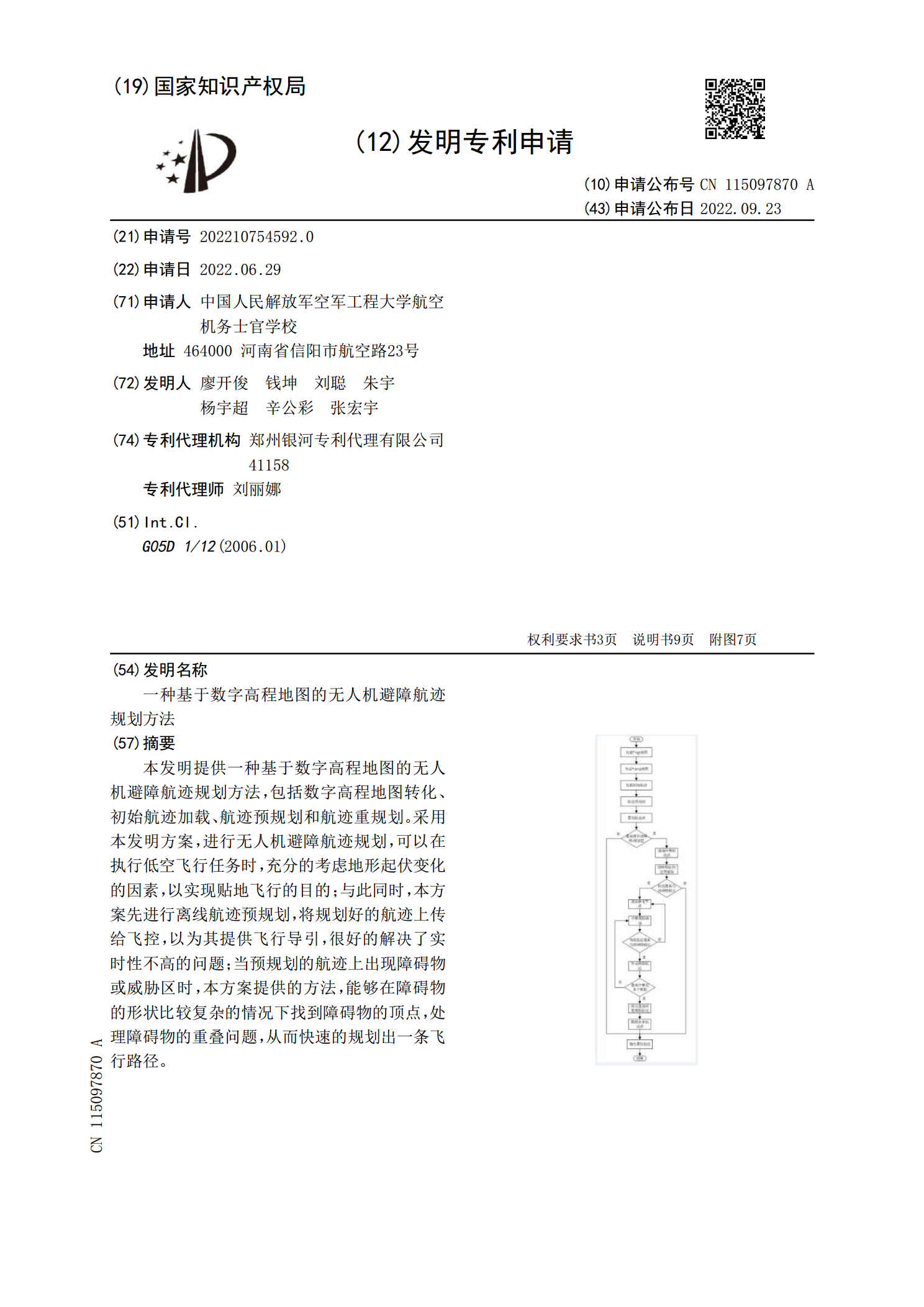
本发明涉及一种基于避障系统的消防无人机航迹规划方法,在无人机的前后左右四个方向设有超声波测距传感器,当测量距离不小于安全距离,则输出原始控制信号,飞行器按计划正常飞行;当发现无人机某一方向出现障碍物,判断即将碰撞,飞控系统将根据测量距离采取收油门、向障碍物反方向倾侧飞行等动作避开障碍物。本发明中所设计的避障算法同传统的局部避障规划算法(人工势场法、栅格法)相比较具有兼容性好,执行效率高的优点;基于超声波避障系统,采用A*搜索算法能够有效的降低机载控制器的计算量,并且能够保证无人机在突发情况下能够快速避障,
一种基于数字高程地图的无人机避障航迹规划方法.pdf
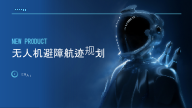
本发明提供一种基于数字高程地图的无人机避障航迹规划方法,包括数字高程地图转化、初始航迹加载、航迹预规划和航迹重规划。采用本发明方案,进行无人机避障航迹规划,可以在执行低空飞行任务时,充分的考虑地形起伏变化的因素,以实现贴地飞行的目的;与此同时,本方案先进行离线航迹预规划,将规划好的航迹上传给飞控,以为其提供飞行导引,很好的解决了实时性不高的问题;当预规划的航迹上出现障碍物或威胁区时,本方案提供的方法,能够在障碍物的形状比较复杂的情况下找到障碍物的顶点,处理障碍物的重叠问题,从而快速的规划出一条飞行路径。
基于改进动态窗口法的无人机避障航迹规划.pptx
汇报人:CONTENTS添加章节标题无人机避障航迹规划概述无人机避障航迹规划的定义无人机避障航迹规划的重要性无人机避障航迹规划的基本原则改进动态窗口法介绍动态窗口法的原理改进动态窗口法的提出改进动态窗口法的优势基于改进动态窗口法的无人机避障航迹规划方法无人机避障航迹规划的步骤无人机避障航迹规划的实现过程无人机避障航迹规划的算法优化无人机避障航迹规划的实验验证实验环境与条件实验结果分析结果与结论无人机避障航迹规划的应用前景与展望无人机避障航迹规划的应用领域无人机避障航迹规划的发展趋势无人机避障航迹规划的未来
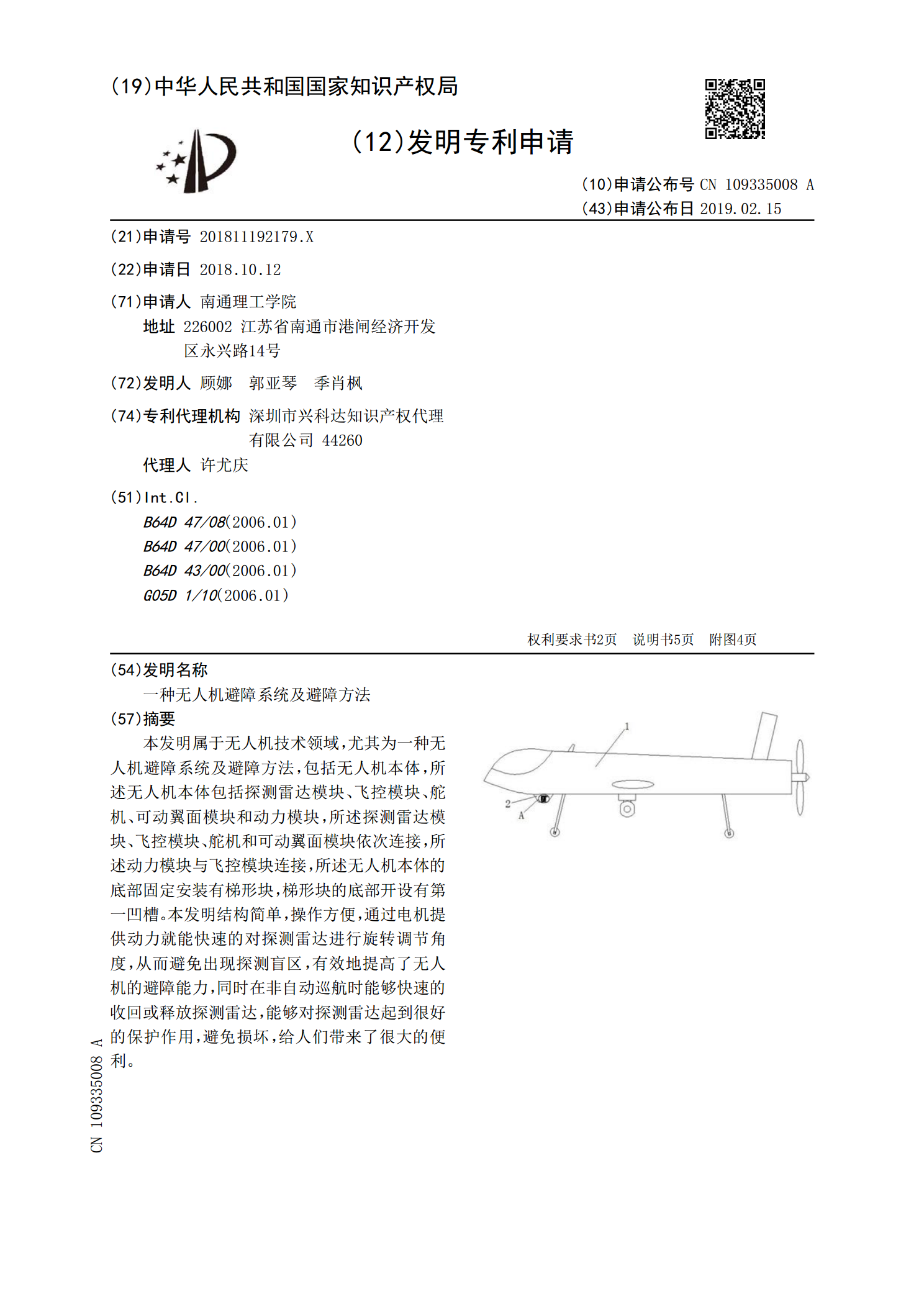
一种无人机避障系统及避障方法.pdf
本发明属于无人机技术领域,尤其为一种无人机避障系统及避障方法,包括无人机本体,所述无人机本体包括探测雷达模块、飞控模块、舵机、可动翼面模块和动力模块,所述探测雷达模块、飞控模块、舵机和可动翼面模块依次连接,所述动力模块与飞控模块连接,所述无人机本体的底部固定安装有梯形块,梯形块的底部开设有第一凹槽。本发明结构简单,操作方便,通过电机提供动力就能快速的对探测雷达进行旋转调节角度,从而避免出现探测盲区,有效地提高了无人机的避障能力,同时在非自动巡航时能够快速的收回或释放探测雷达,能够对探测雷达起到很好的保护作
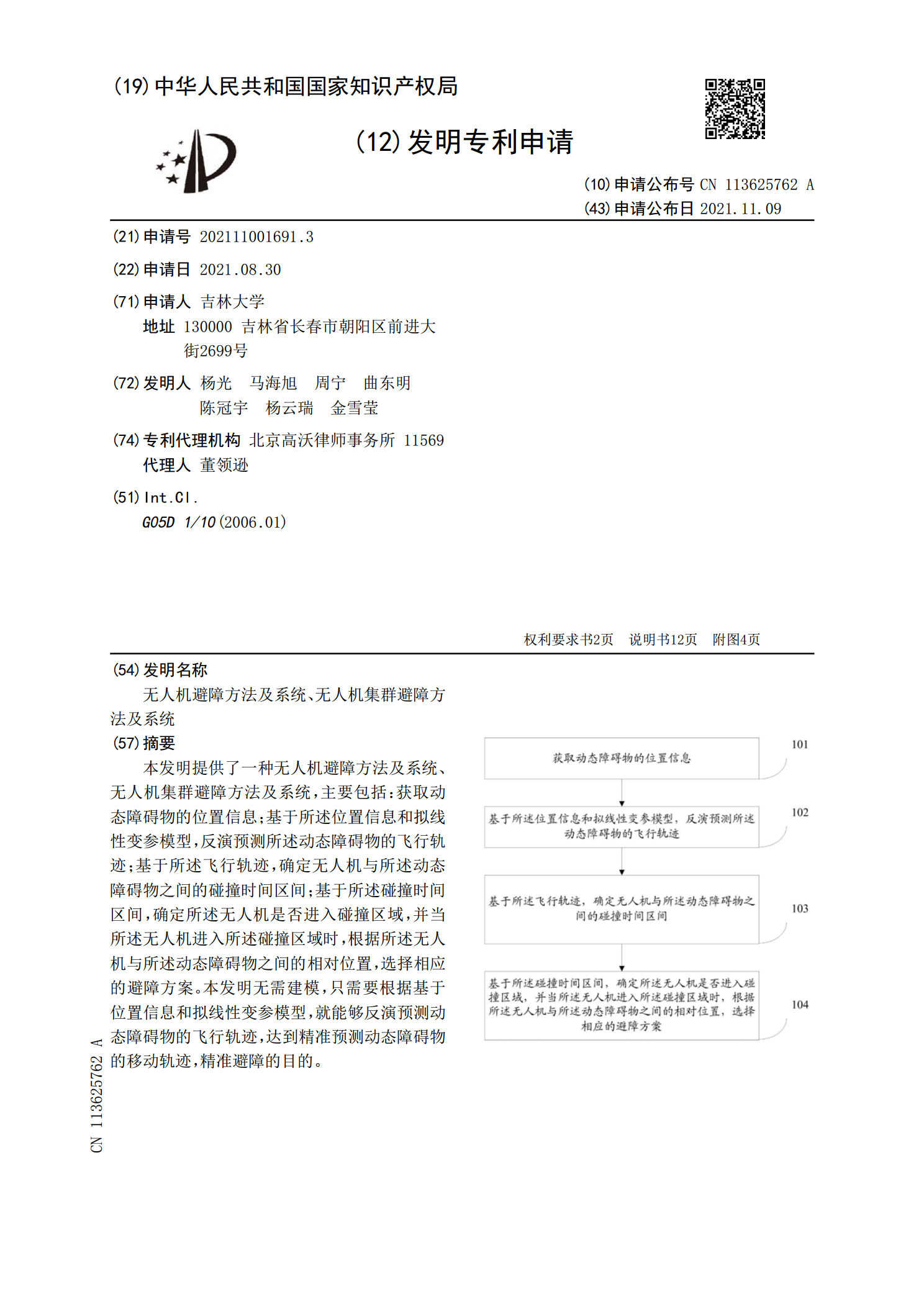
无人机避障方法及系统、无人机集群避障方法及系统.pdf
本发明提供了一种无人机避障方法及系统、无人机集群避障方法及系统,主要包括:获取动态障碍物的位置信息;基于所述位置信息和拟线性变参模型,反演预测所述动态障碍物的飞行轨迹;基于所述飞行轨迹,确定无人机与所述动态障碍物之间的碰撞时间区间;基于所述碰撞时间区间,确定所述无人机是否进入碰撞区域,并当所述无人机进入所述碰撞区域时,根据所述无人机与所述动态障碍物之间的相对位置,选择相应的避障方案。本发明无需建模,只需要根据基于位置信息和拟线性变参模型,就能够反演预测动态障碍物的飞行轨迹,达到精准预测动态障碍物的移动轨迹