
一种基于数字高程地图的无人机避障航迹规划方法.pdf

志玉****爱啊

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于数字高程地图的无人机避障航迹规划方法.pdf
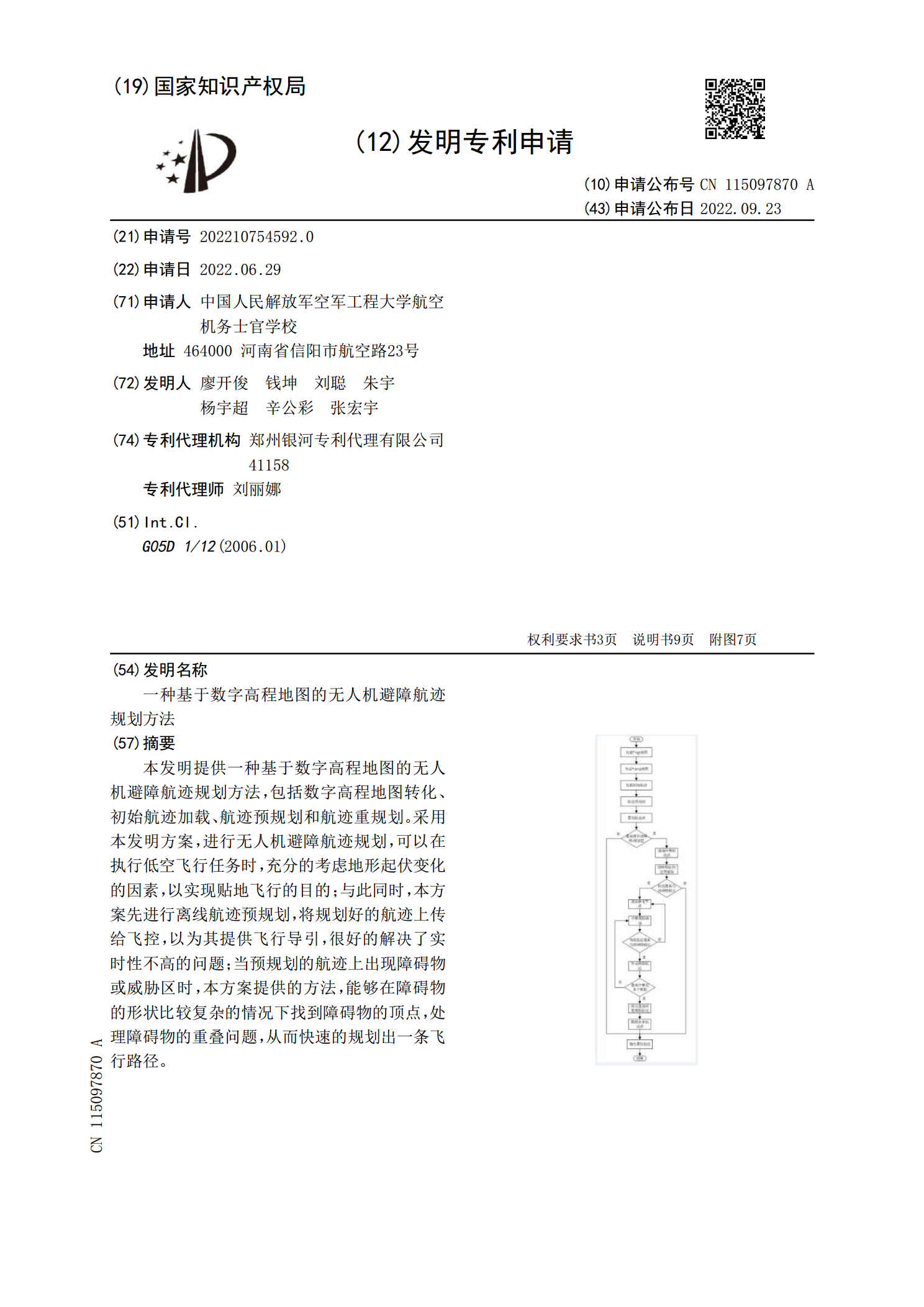
本发明提供一种基于数字高程地图的无人机避障航迹规划方法,包括数字高程地图转化、初始航迹加载、航迹预规划和航迹重规划。采用本发明方案,进行无人机避障航迹规划,可以在执行低空飞行任务时,充分的考虑地形起伏变化的因素,以实现贴地飞行的目的;与此同时,本方案先进行离线航迹预规划,将规划好的航迹上传给飞控,以为其提供飞行导引,很好的解决了实时性不高的问题;当预规划的航迹上出现障碍物或威胁区时,本方案提供的方法,能够在障碍物的形状比较复杂的情况下找到障碍物的顶点,处理障碍物的重叠问题,从而快速的规划出一条飞行路径。
一种基于避障系统的消防无人机航迹规划方法.pdf
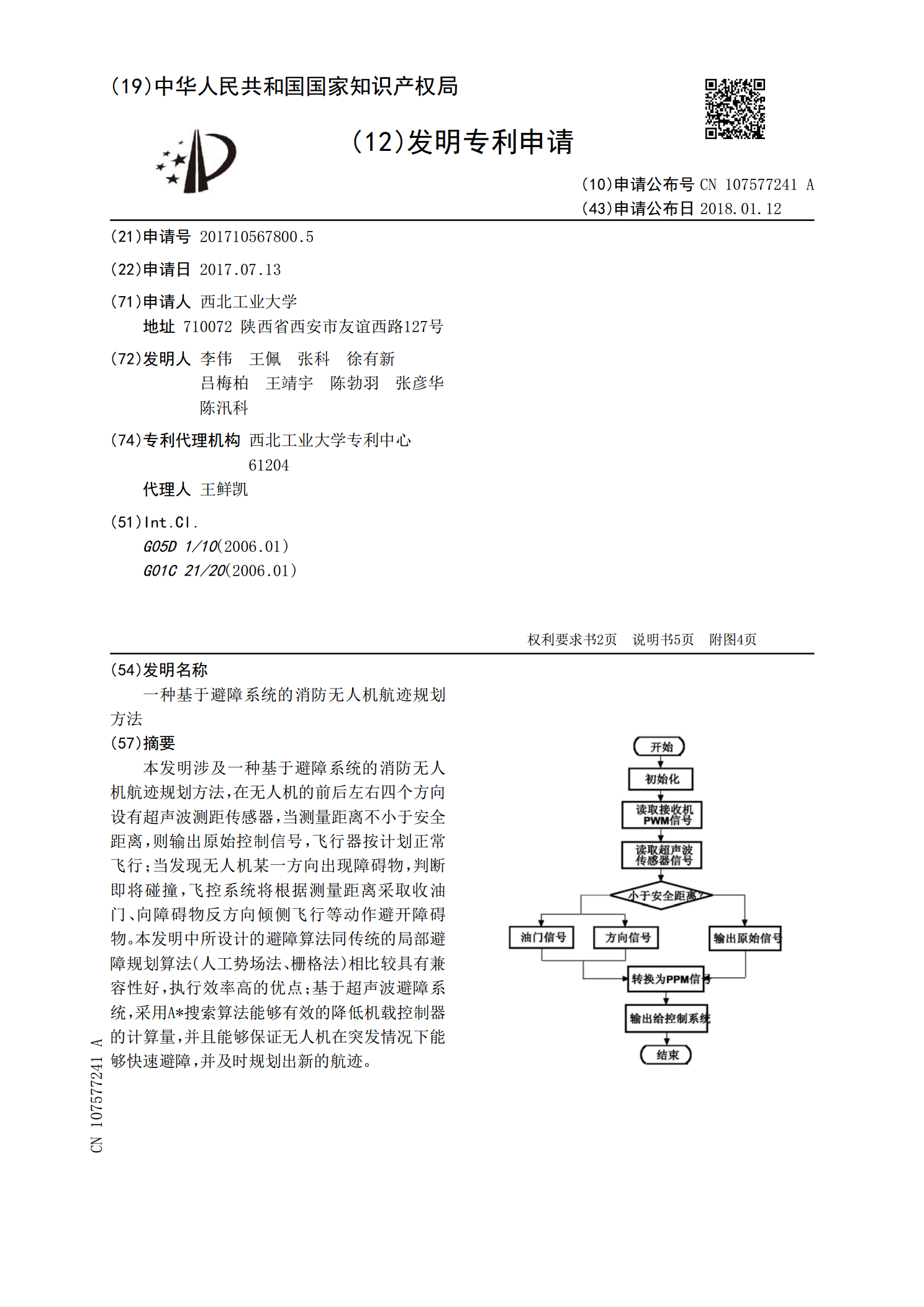
本发明涉及一种基于避障系统的消防无人机航迹规划方法,在无人机的前后左右四个方向设有超声波测距传感器,当测量距离不小于安全距离,则输出原始控制信号,飞行器按计划正常飞行;当发现无人机某一方向出现障碍物,判断即将碰撞,飞控系统将根据测量距离采取收油门、向障碍物反方向倾侧飞行等动作避开障碍物。本发明中所设计的避障算法同传统的局部避障规划算法(人工势场法、栅格法)相比较具有兼容性好,执行效率高的优点;基于超声波避障系统,采用A*搜索算法能够有效的降低机载控制器的计算量,并且能够保证无人机在突发情况下能够快速避障,
基于改进动态窗口法的无人机避障航迹规划.pptx
汇报人:CONTENTS添加章节标题无人机避障航迹规划概述无人机避障航迹规划的定义无人机避障航迹规划的重要性无人机避障航迹规划的基本原则改进动态窗口法介绍动态窗口法的原理改进动态窗口法的提出改进动态窗口法的优势基于改进动态窗口法的无人机避障航迹规划方法无人机避障航迹规划的步骤无人机避障航迹规划的实现过程无人机避障航迹规划的算法优化无人机避障航迹规划的实验验证实验环境与条件实验结果分析结果与结论无人机避障航迹规划的应用前景与展望无人机避障航迹规划的应用领域无人机避障航迹规划的发展趋势无人机避障航迹规划的未来

面向智慧避障的物流无人机航迹规划研究.docx
面向智慧避障的物流无人机航迹规划研究面向智慧避障的物流无人机航迹规划研究摘要:随着物流业务的不断发展和无人机技术的成熟,物流无人机正成为未来物流配送领域的重要工具。然而,无人机在进行航迹规划时面临着很多挑战,其中最重要的是避障问题。本论文旨在研究面向智慧避障的物流无人机航迹规划方法,通过综合运用计算机视觉技术、机器学习算法和路径规划算法,实现物流无人机的智慧避障,提高物流配送的效率和安全性。论文首先介绍了无人机航迹规划的研究背景和意义,然后分析了无人机航迹规划中遇到的障碍及现有方法的局限性,接着介绍了智慧
一种多机编队避障的航迹规划方法.pdf
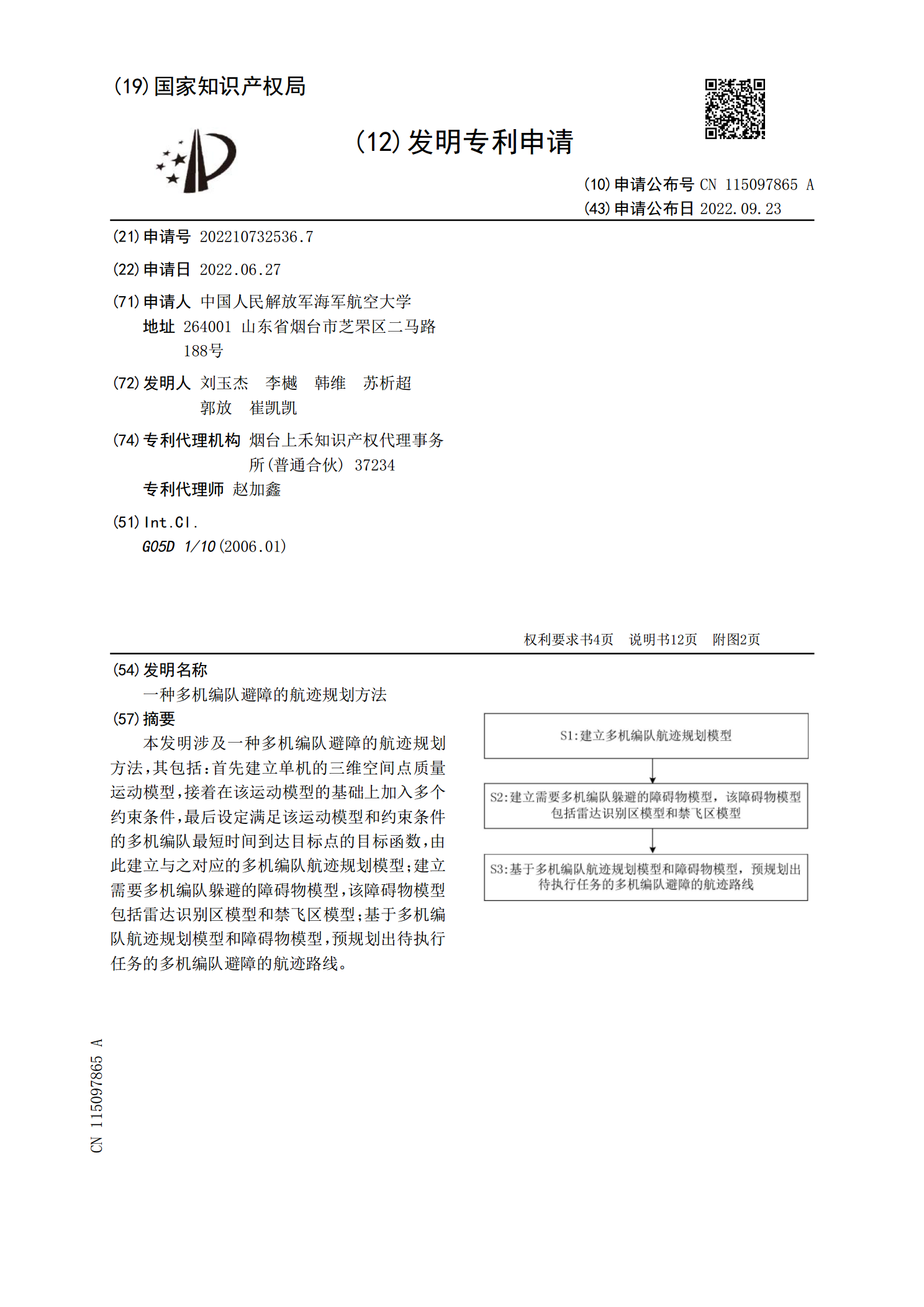
本发明涉及一种多机编队避障的航迹规划方法,其包括:首先建立单机的三维空间点质量运动模型,接着在该运动模型的基础上加入多个约束条件,最后设定满足该运动模型和约束条件的多机编队最短时间到达目标点的目标函数,由此建立与之对应的多机编队航迹规划模型;建立需要多机编队躲避的障碍物模型,该障碍物模型包括雷达识别区模型和禁飞区模型;基于多机编队航迹规划模型和障碍物模型,预规划出待执行任务的多机编队避障的航迹路线。