
车道线虚线角点实时检测方法、系统、终端及介质.pdf

St****36


1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车道线虚线角点实时检测方法、系统、终端及介质.pdf
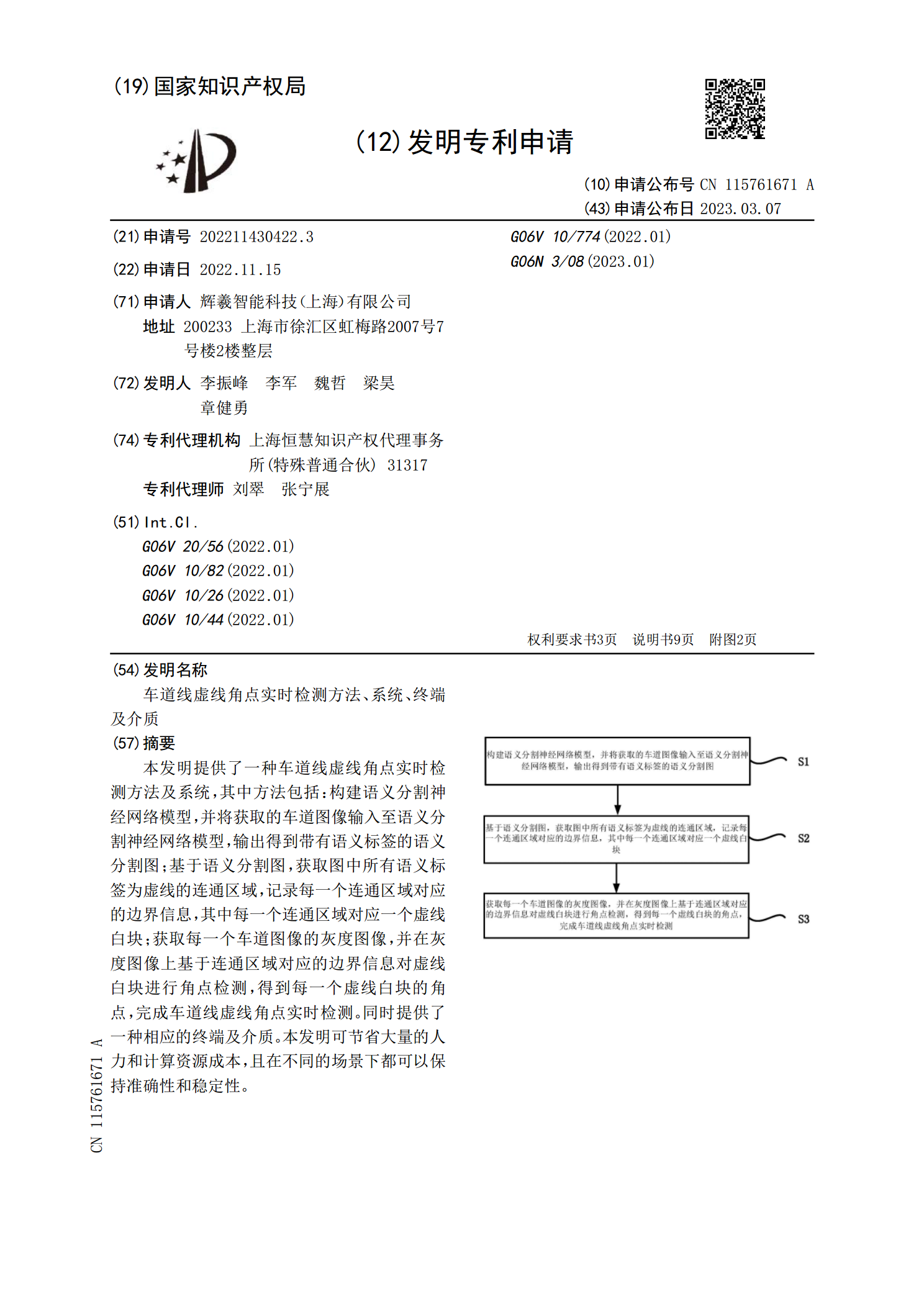
本发明提供了一种车道线虚线角点实时检测方法及系统,其中方法包括:构建语义分割神经网络模型,并将获取的车道图像输入至语义分割神经网络模型,输出得到带有语义标签的语义分割图;基于语义分割图,获取图中所有语义标签为虚线的连通区域,记录每一个连通区域对应的边界信息,其中每一个连通区域对应一个虚线白块;获取每一个车道图像的灰度图像,并在灰度图像上基于连通区域对应的边界信息对虚线白块进行角点检测,得到每一个虚线白块的角点,完成车道线虚线角点实时检测。同时提供了一种相应的终端及介质。本发明可节省大量的人力和计算资源成本
实时精准车道线检测和分类方法、系统及车辆.pdf
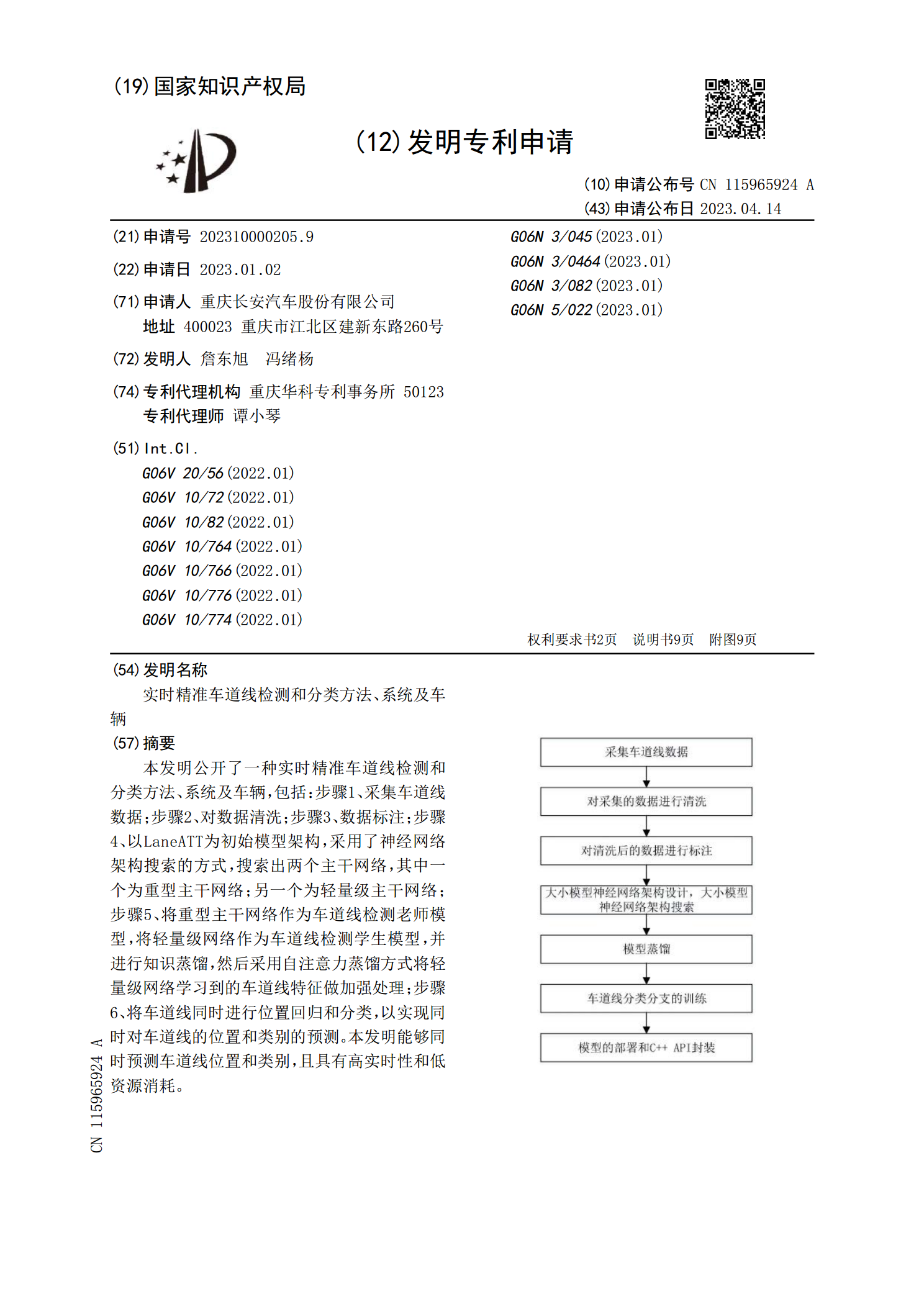
本发明公开了一种实时精准车道线检测和分类方法、系统及车辆,包括:步骤1、采集车道线数据;步骤2、对数据清洗;步骤3、数据标注;步骤4、以LaneATT为初始模型架构,采用了神经网络架构搜索的方式,搜索出两个主干网络,其中一个为重型主干网络;另一个为轻量级主干网络;步骤5、将重型主干网络作为车道线检测老师模型,将轻量级网络作为车道线检测学生模型,并进行知识蒸馏,然后采用自注意力蒸馏方式将轻量级网络学习到的车道线特征做加强处理;步骤6、将车道线同时进行位置回归和分类,以实现同时对车道线的位置和类别的预测。本发

车道线检测方法、设备和介质.pdf
本申请公开了一种车道线检测方法、设备和介质。该方法包括:获取待检测图像,利用检测模型对待检测图像进行特征提取获得图像特征;利用检测模型的查询向量对图像特征进行注意力分配处理,获得候选特征;查询向量为查找车道线的三维向量;利用检测模型对候选特征进行位置偏移预测,获得查询向量对应的位置偏移量,根据查询向量以及查询向量对应的位置偏移量确定待检测图像的车道线。采用本申请的方法,可以提高车道线检测的准确性。
车道线的检测方法、装置、设备及存储介质.pdf
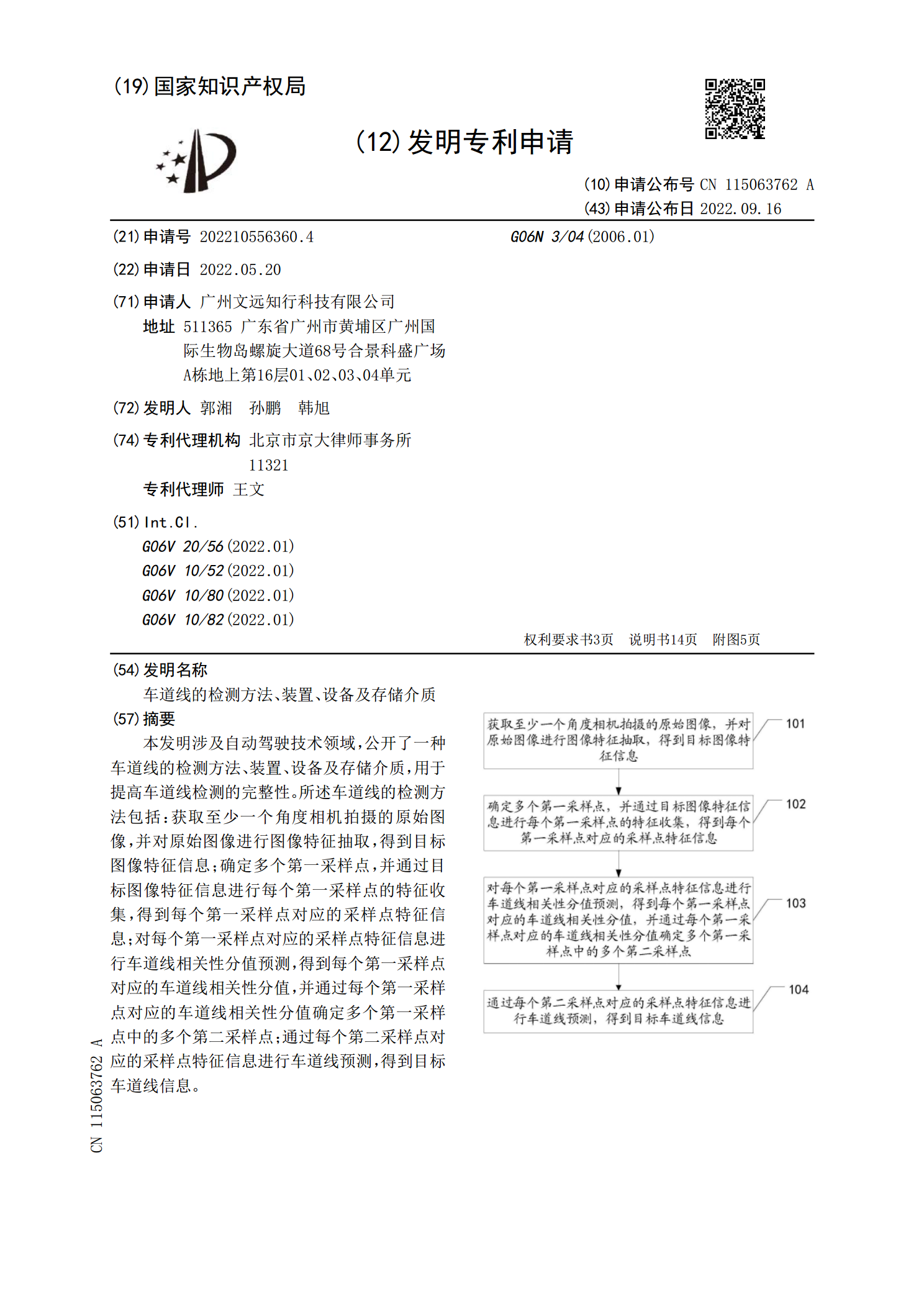
本发明涉及自动驾驶技术领域,公开了一种车道线的检测方法、装置、设备及存储介质,用于提高车道线检测的完整性。所述车道线的检测方法包括:获取至少一个角度相机拍摄的原始图像,并对原始图像进行图像特征抽取,得到目标图像特征信息;确定多个第一采样点,并通过目标图像特征信息进行每个第一采样点的特征收集,得到每个第一采样点对应的采样点特征信息;对每个第一采样点对应的采样点特征信息进行车道线相关性分值预测,得到每个第一采样点对应的车道线相关性分值,并通过每个第一采样点对应的车道线相关性分值确定多个第一采样点中的多个第二采
车道线的检测方法、装置、设备及存储介质.pdf
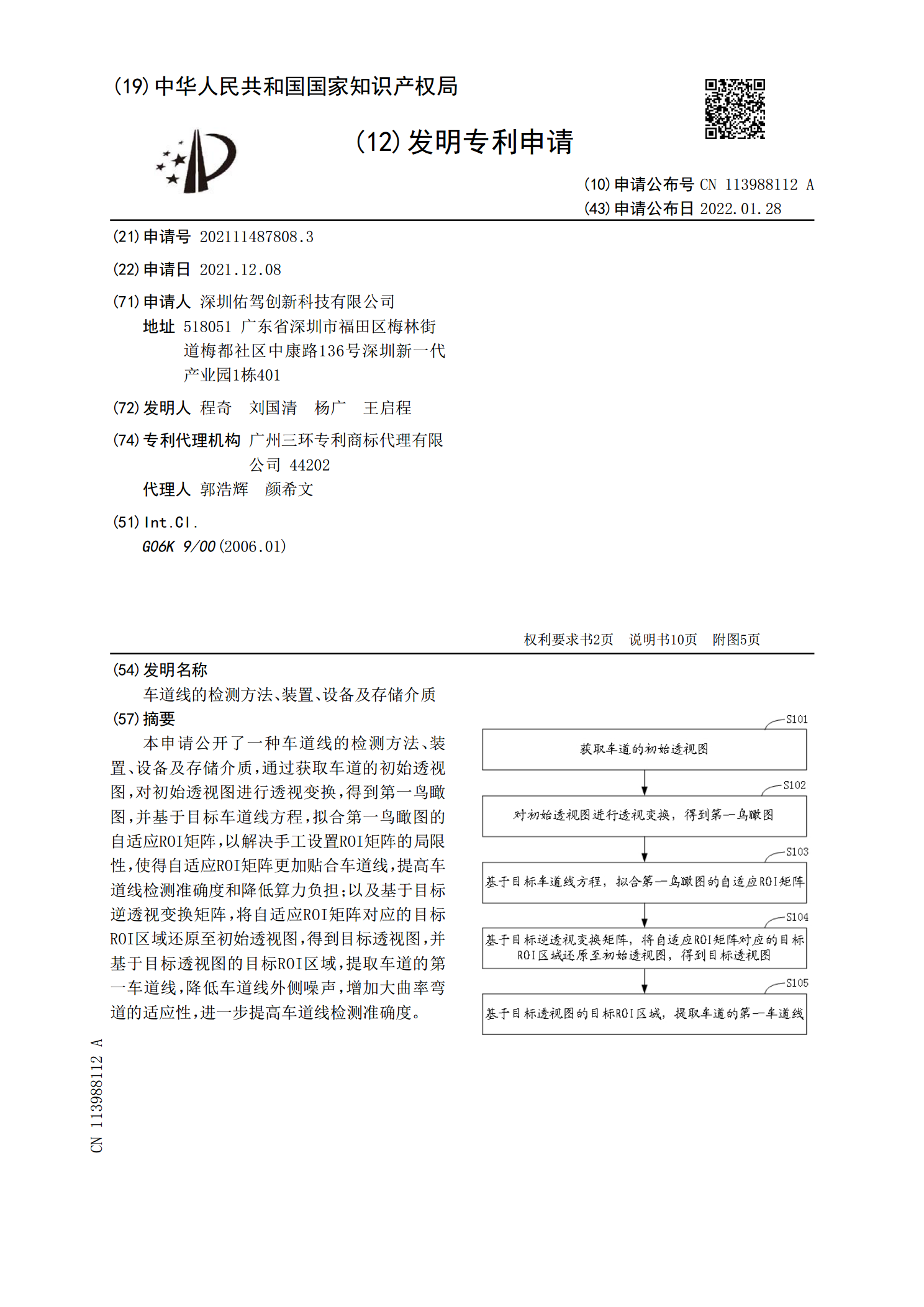
本申请公开了一种车道线的检测方法、装置、设备及存储介质,通过获取车道的初始透视图,对初始透视图进行透视变换,得到第一鸟瞰图,并基于目标车道线方程,拟合第一鸟瞰图的自适应ROI矩阵,以解决手工设置ROI矩阵的局限性,使得自适应ROI矩阵更加贴合车道线,提高车道线检测准确度和降低算力负担;以及基于目标逆透视变换矩阵,将自适应ROI矩阵对应的目标ROI区域还原至初始透视图,得到目标透视图,并基于目标透视图的目标ROI区域,提取车道的第一车道线,降低车道线外侧噪声,增加大曲率弯道的适应性,进一步提高车道线检测准确