
实时精准车道线检测和分类方法、系统及车辆.pdf

是你****元呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
实时精准车道线检测和分类方法、系统及车辆.pdf
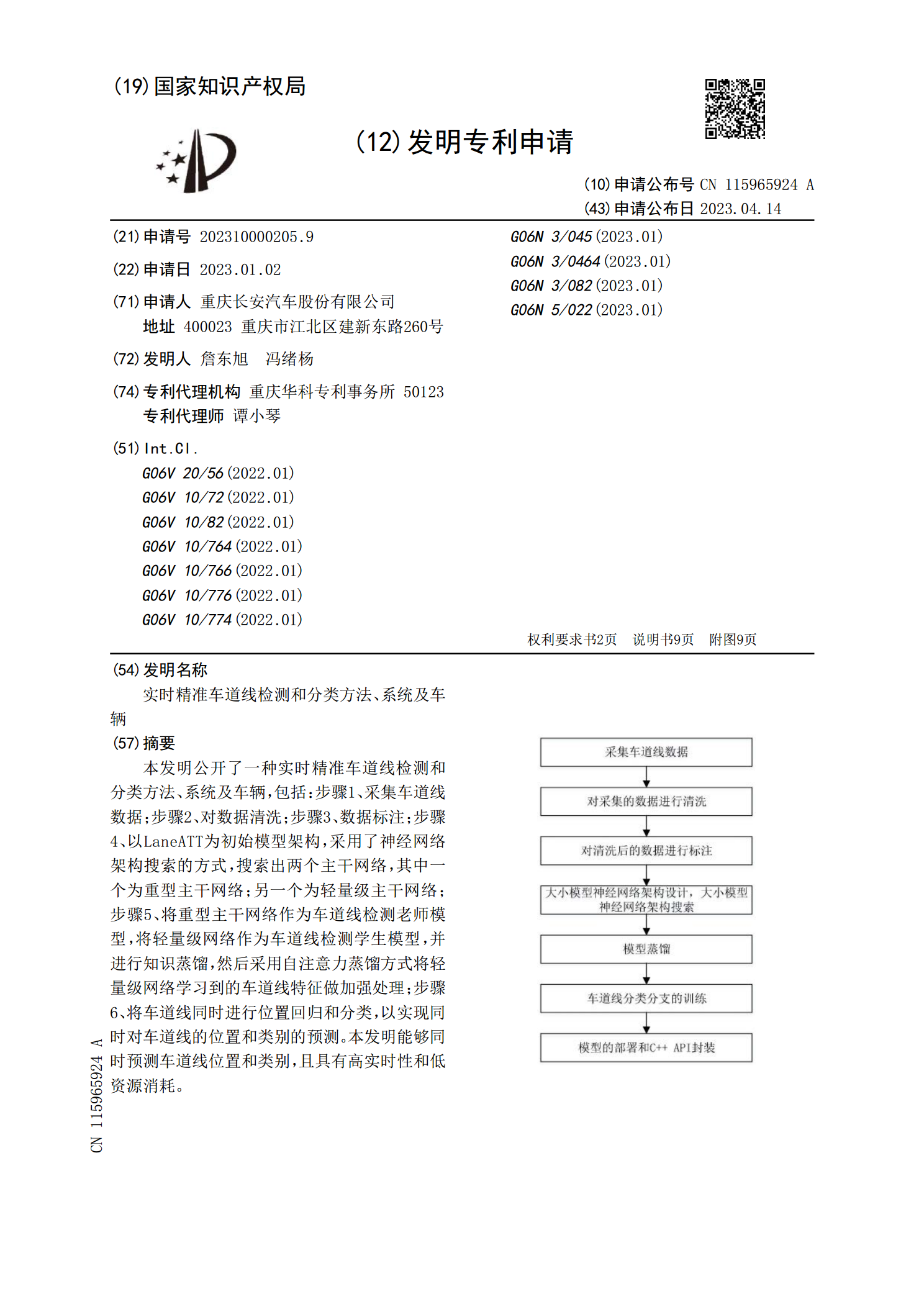
本发明公开了一种实时精准车道线检测和分类方法、系统及车辆,包括:步骤1、采集车道线数据;步骤2、对数据清洗;步骤3、数据标注;步骤4、以LaneATT为初始模型架构,采用了神经网络架构搜索的方式,搜索出两个主干网络,其中一个为重型主干网络;另一个为轻量级主干网络;步骤5、将重型主干网络作为车道线检测老师模型,将轻量级网络作为车道线检测学生模型,并进行知识蒸馏,然后采用自注意力蒸馏方式将轻量级网络学习到的车道线特征做加强处理;步骤6、将车道线同时进行位置回归和分类,以实现同时对车道线的位置和类别的预测。本发
车道线虚线角点实时检测方法、系统、终端及介质.pdf
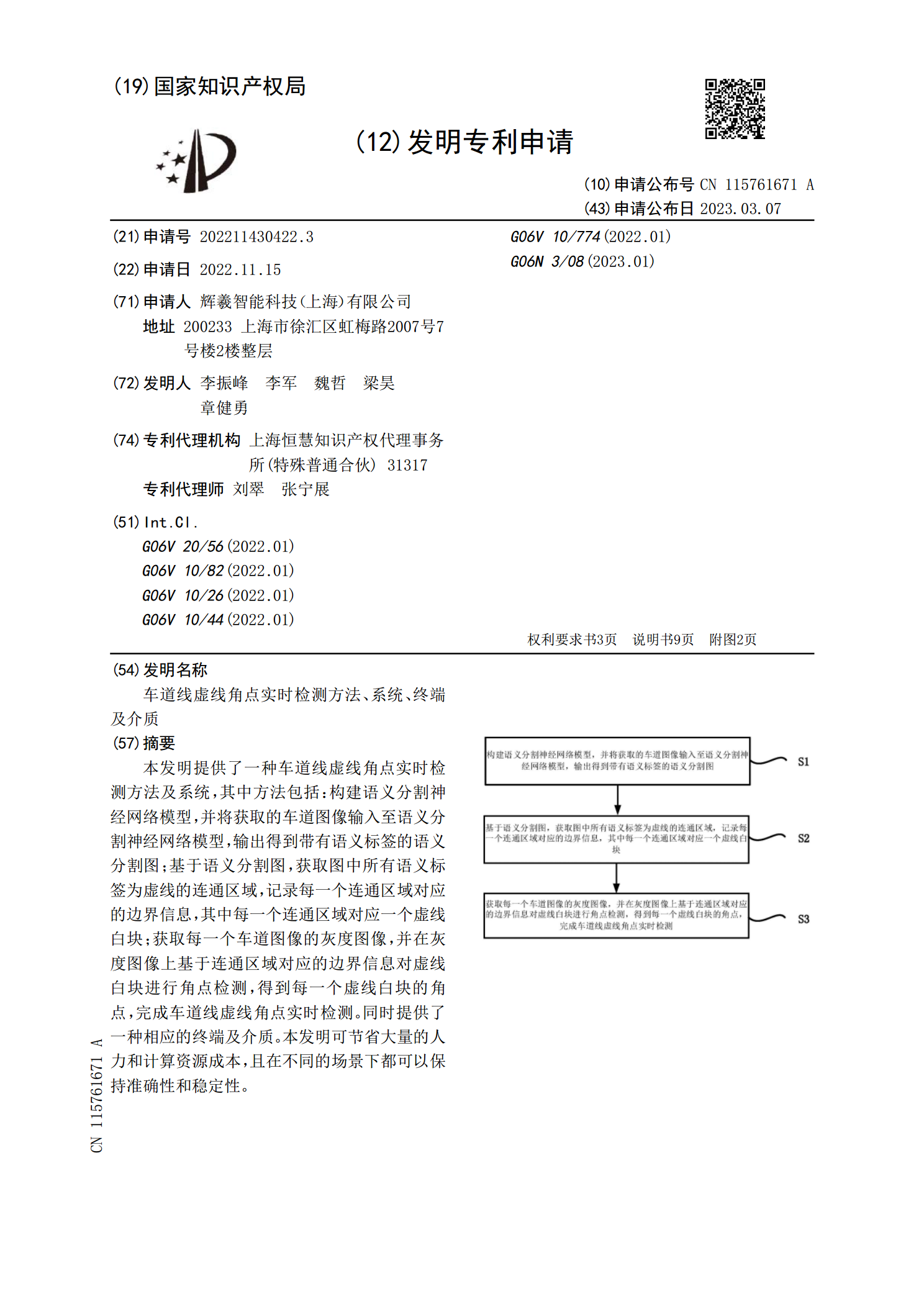
本发明提供了一种车道线虚线角点实时检测方法及系统,其中方法包括:构建语义分割神经网络模型,并将获取的车道图像输入至语义分割神经网络模型,输出得到带有语义标签的语义分割图;基于语义分割图,获取图中所有语义标签为虚线的连通区域,记录每一个连通区域对应的边界信息,其中每一个连通区域对应一个虚线白块;获取每一个车道图像的灰度图像,并在灰度图像上基于连通区域对应的边界信息对虚线白块进行角点检测,得到每一个虚线白块的角点,完成车道线虚线角点实时检测。同时提供了一种相应的终端及介质。本发明可节省大量的人力和计算资源成本

车辆的车道偏离检测方法、系统及车辆.pdf
本发明提出一种车辆的车道偏离检测方法、系统及车辆,该方法包括以下步骤:获取车辆在当前车道的位姿信息;根据车辆的位姿信息得到车辆的前轮与车道线之间的横向距离;如果横向距离小于预设值,则判定车辆偏离出当前车道。本发明能够实时准确地检测车辆是否发生车道偏离,以便在发生车道偏离时向用户发出报警信息,从而极大地提高了行车安全性。

无人驾驶车辆的车道保持及车道线检测方法.docx
无人驾驶车辆的车道保持及车道线检测方法无人驾驶车辆的车道保持及车道线检测方法摘要:随着无人驾驶技术的迅速发展,无人驾驶车辆的车道保持及车道线检测方法成为了研究的热点。本文通过对无人驾驶车辆的车道保持及车道线检测的相关技术进行分析和总结,探讨了其原理和应用,以期为无人驾驶技术的进一步研究提供参考。关键词:无人驾驶车辆,车道保持,车道线检测一、引言随着科技的不断进步和应用,无人驾驶车辆的研究和发展取得了长足的进步。其中,车道保持及车道线检测是无人驾驶车辆中的重要技术之一。车道保持技术旨在确保无人驾驶车辆在道路

ETC车道车辆检测系统及检测方法.pdf
本发明涉及一种ETC车道车辆检测系统及检测方法,包括车道主机、位于ETC车道上的固定架、与车道主机电性连接的激光扫描传感器和车牌识别装置,激光扫描传感器和车牌识别装置均固定于固定架上,激光扫描传感器设有第一激光口和第二激光口,第一激光口和第二激光口均面向ETC车道,第一激光口和第二激光口沿ETC车道长度方向布置。本发明通过激光扫描传感器、车牌识别装置和车道控制器重构车辆的三维轮廓,进行精确车型识别,就算大车装了小车的OBU,由于车辆信息与OBU信息不符合,大车将无法通行,防止车辆在ETC车道上的逃费行为,