
翻转式攀爬全自动清洁机器人和方法.pdf

一吃****天材


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
翻转式攀爬全自动清洁机器人和方法.pdf
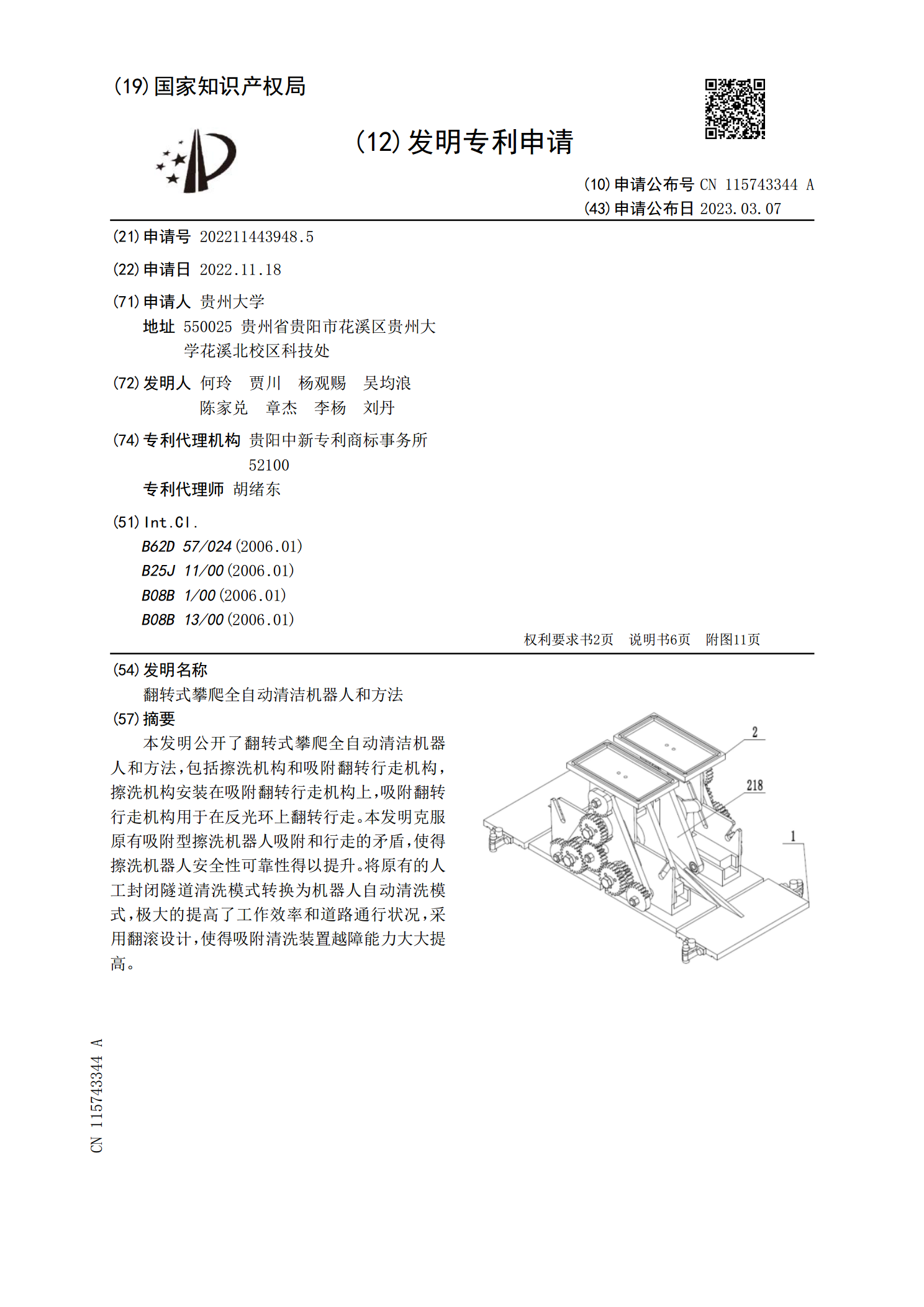
本发明公开了翻转式攀爬全自动清洁机器人和方法,包括擦洗机构和吸附翻转行走机构,擦洗机构安装在吸附翻转行走机构上,吸附翻转行走机构用于在反光环上翻转行走。本发明克服原有吸附型擦洗机器人吸附和行走的矛盾,使得擦洗机器人安全性可靠性得以提升。将原有的人工封闭隧道清洗模式转换为机器人自动清洗模式,极大的提高了工作效率和道路通行状况,采用翻滚设计,使得吸附清洗装置越障能力大大提高。
伸缩式攀爬全自动清洁机器人和方法.pdf
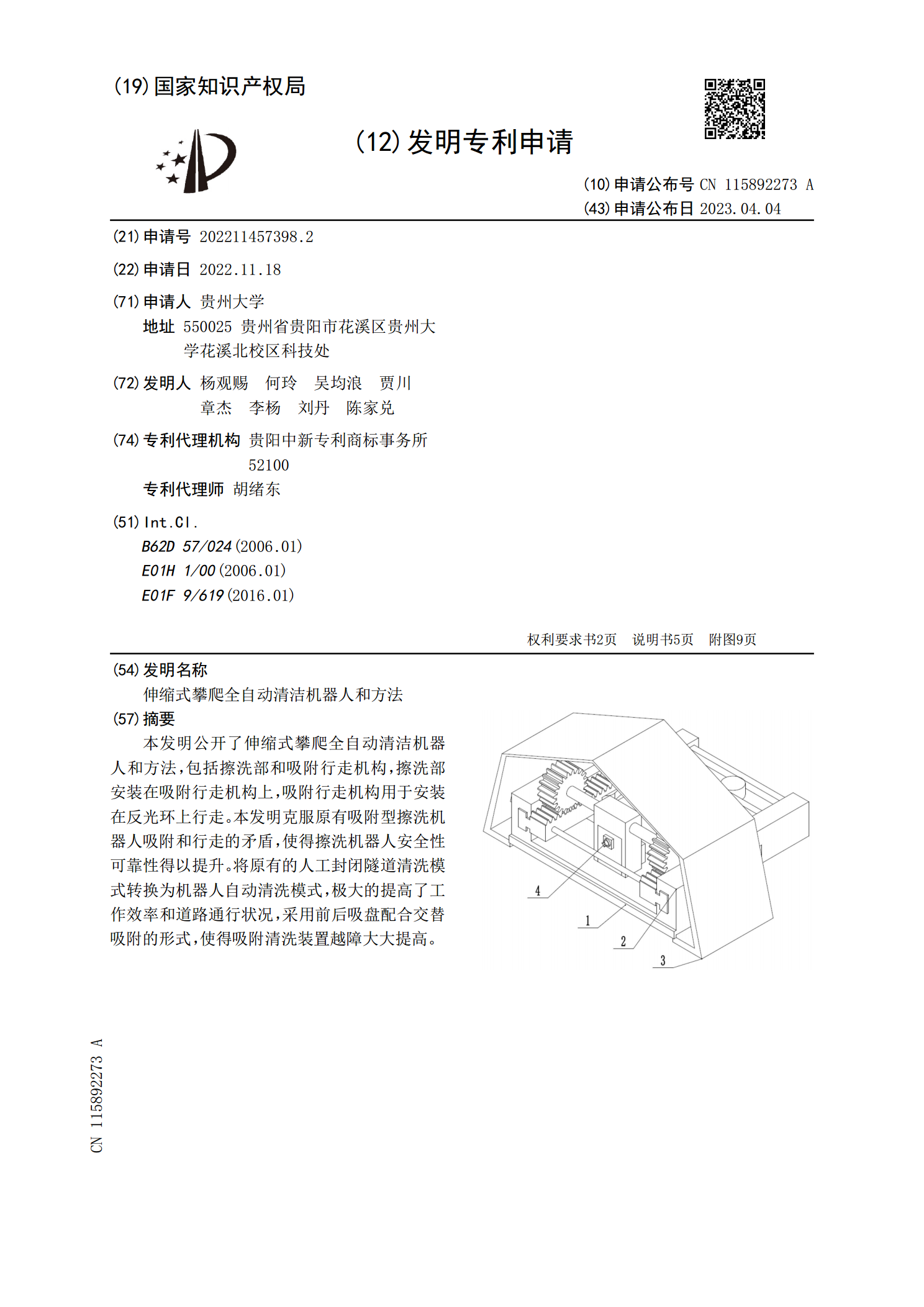
本发明公开了伸缩式攀爬全自动清洁机器人和方法,包括擦洗部和吸附行走机构,擦洗部安装在吸附行走机构上,吸附行走机构用于安装在反光环上行走。本发明克服原有吸附型擦洗机器人吸附和行走的矛盾,使得擦洗机器人安全性可靠性得以提升。将原有的人工封闭隧道清洗模式转换为机器人自动清洗模式,极大的提高了工作效率和道路通行状况,采用前后吸盘配合交替吸附的形式,使得吸附清洗装置越障大大提高。

智能翻转式攀爬机器人1.doc
智能翻转式攀爬机器人公布号:CN101695835A公布日:2010.04.21申请号:200910073108.2申请日:2009.10.29申请人:哈尔滨工程大学地址:150001黑龙江省哈尔滨市南岗区南通大街145号1号楼哈尔滨工程大学科技处知识产权办公室发明人:史冬岩;石先杰;邓波;陆玉婷;李芳发明名称智能翻转式攀爬机器人摘要本发明提供的是一种智能翻转式攀爬机器人。组成包括躯干,安装在躯干上的两个翻转臂,安装在翻转臂上的旋转臂,安装在旋转臂上的夹紧手爪和控制器;所述的躯干包括两平行支撑杆、传动轴、
清洁机器人和清洁系统.pdf
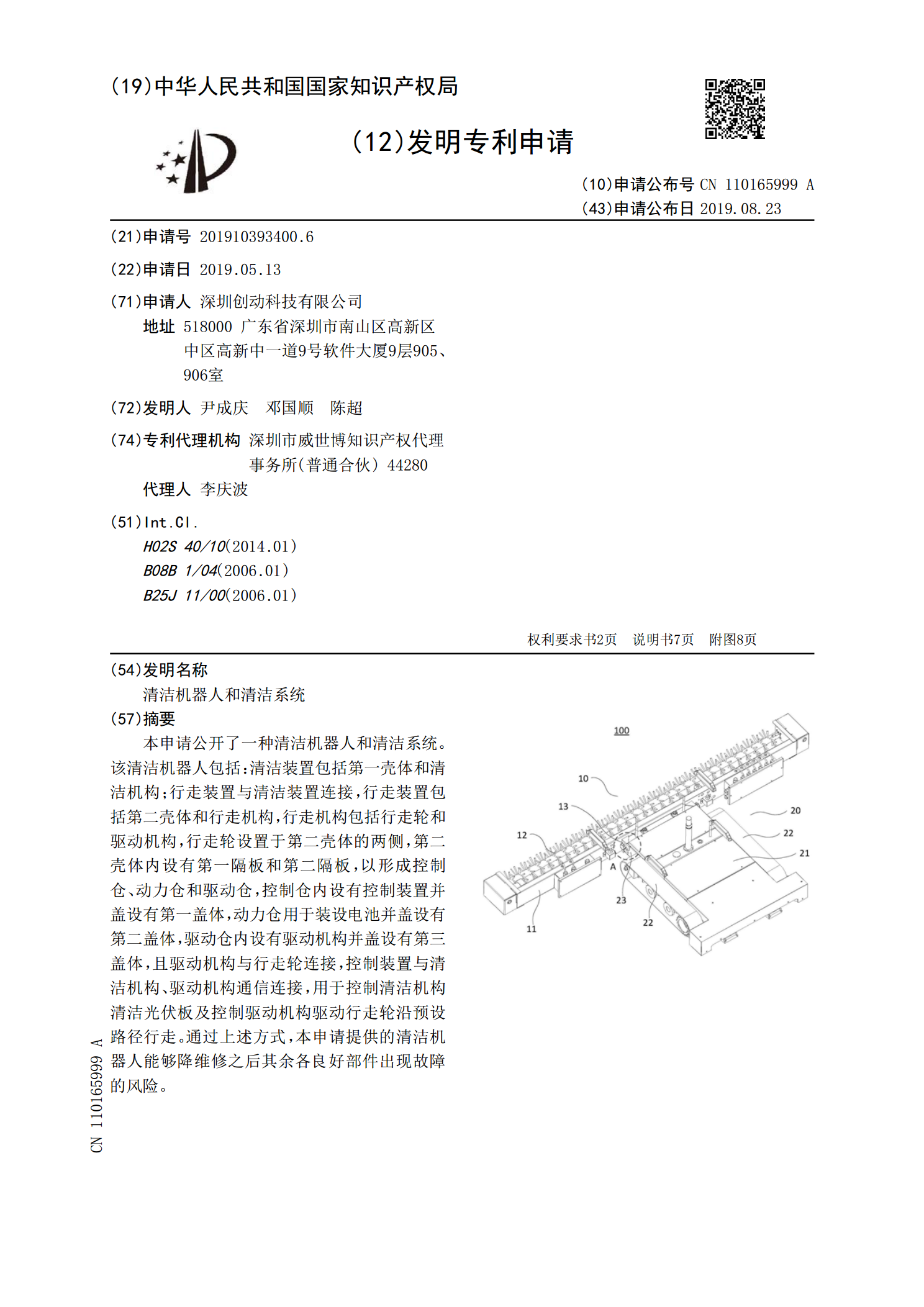
本申请公开了一种清洁机器人和清洁系统。该清洁机器人包括:清洁装置包括第一壳体和清洁机构;行走装置与清洁装置连接,行走装置包括第二壳体和行走机构,行走机构包括行走轮和驱动机构,行走轮设置于第二壳体的两侧,第二壳体内设有第一隔板和第二隔板,以形成控制仓、动力仓和驱动仓,控制仓内设有控制装置并盖设有第一盖体,动力仓用于装设电池并盖设有第二盖体,驱动仓内设有驱动机构并盖设有第三盖体,且驱动机构与行走轮连接,控制装置与清洁机构、驱动机构通信连接,用于控制清洁机构清洁光伏板及控制驱动机构驱动行走轮沿预设路径行走。通过

泳池清洁机器人和泳池清理方法.pdf
本申请涉及一种泳池清洁机器人和泳池清理方法,属于自动控制技术领域,包括:壳体、移动机构、清理机构、目标物信息获取模块和控制模块,通过控制模块获取目标物信息获取模块获取到的信息,该信息为表示工作水域内目标物的分布情况的信息;根据该信息控制移动机构和清理机构运行;可以解决现有的泳池清洁机器人清理漂浮物的耗时较长,导致清理漂浮物的效率较低的问题;由于可以根据目标物的分布情况有目的地向目标物移动,因此可以提高清理漂浮物的效率。同时可以解决现有的泳池清洁机器人的清理机构一直处于运行状态,导致浪费泳池清洁机器人的设备