
一种自动泊车测试方法、装置、存储介质及设备.pdf

努力****承悦


1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自动泊车测试方法、装置、存储介质及设备.pdf
本申请实施例提供一种自动泊车测试方法、装置、存储介质及设备,该方法中,通过解析基于场景仿真软件搭建的泊车场景的参数文件来构建仿真地图,仿真地图上的坐标基于地图坐标系和障碍物占用类型而得到,这样,使用仿真地图来为自动泊车的规划控制算法提供所需的输入交互信息,并且基于车辆参数生成的被测车辆模型根据规划控制算法的控制量更新被测车辆的位置信息,之后,根据每个仿真步长中得到的控制量和位置信息对规划控制算法的效果进行判断。如此,可以在项目早期就实现对规划控制算法的验证,即实现自动泊车功能的测试,进而有效推进项目开发进
自动泊车方法、装置、电子设备、存储介质.pdf
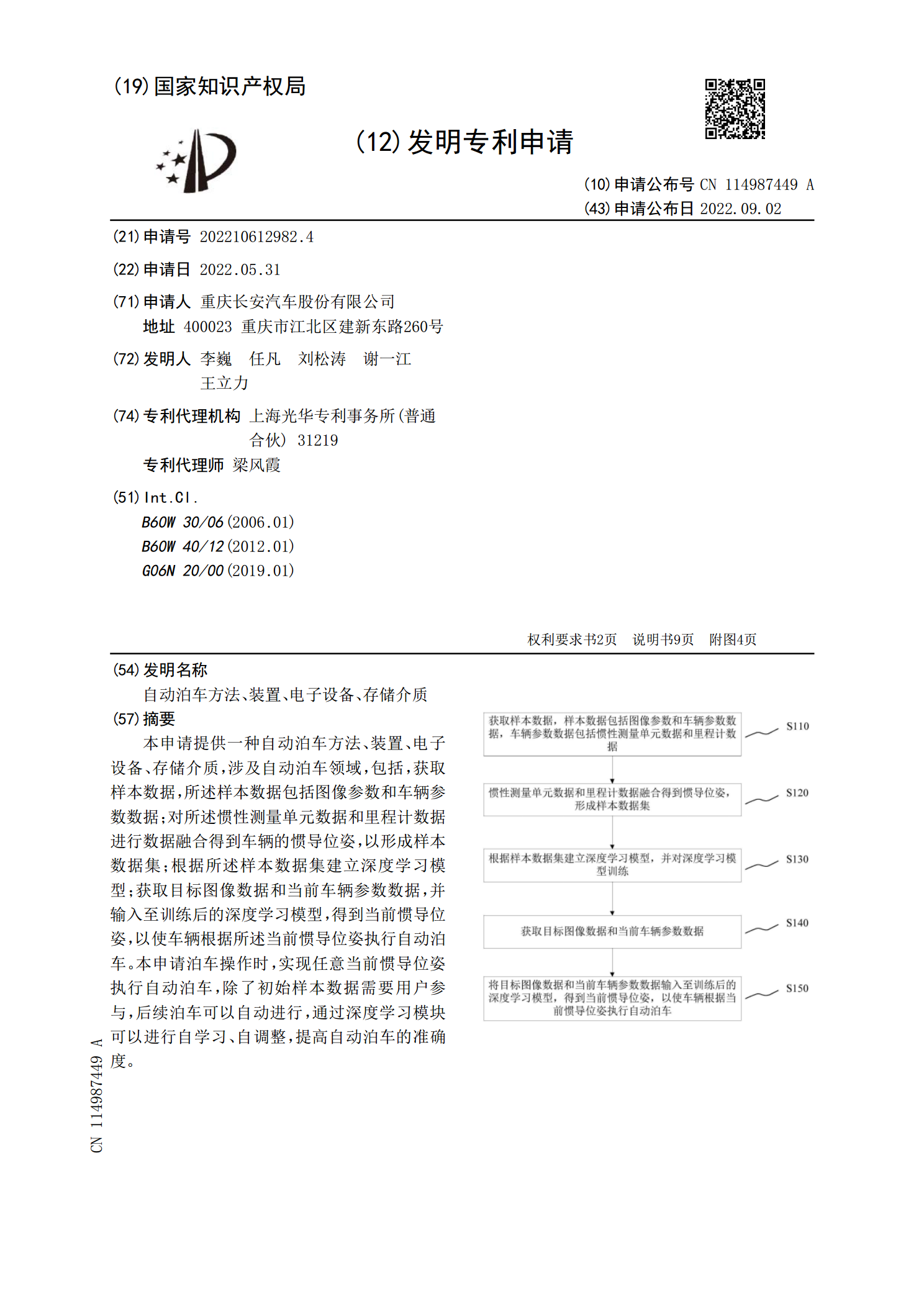
本申请提供一种自动泊车方法、装置、电子设备、存储介质,涉及自动泊车领域,包括,获取样本数据,所述样本数据包括图像参数和车辆参数数据;对所述惯性测量单元数据和里程计数据进行数据融合得到车辆的惯导位姿,以形成样本数据集;根据所述样本数据集建立深度学习模型;获取目标图像数据和当前车辆参数数据,并输入至训练后的深度学习模型,得到当前惯导位姿,以使车辆根据所述当前惯导位姿执行自动泊车。本申请泊车操作时,实现任意当前惯导位姿执行自动泊车,除了初始样本数据需要用户参与,后续泊车可以自动进行,通过深度学习模块可以进行自学
自动泊车路径规划方法、装置、设备及可读存储介质.pdf
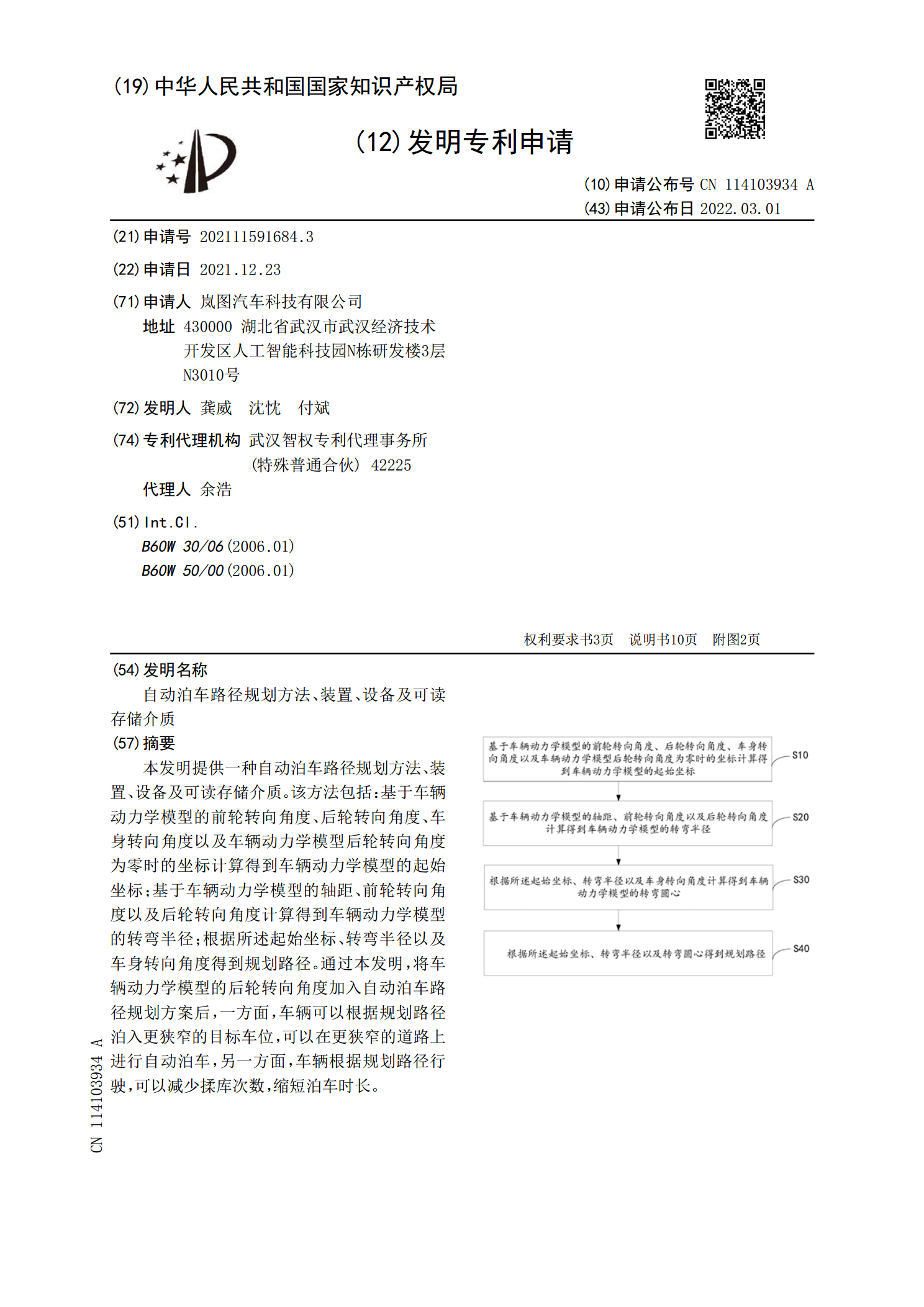
本发明提供一种自动泊车路径规划方法、装置、设备及可读存储介质。该方法包括:基于车辆动力学模型的前轮转向角度、后轮转向角度、车身转向角度以及车辆动力学模型后轮转向角度为零时的坐标计算得到车辆动力学模型的起始坐标;基于车辆动力学模型的轴距、前轮转向角度以及后轮转向角度计算得到车辆动力学模型的转弯半径;根据所述起始坐标、转弯半径以及车身转向角度得到规划路径。通过本发明,将车辆动力学模型的后轮转向角度加入自动泊车路径规划方案后,一方面,车辆可以根据规划路径泊入更狭窄的目标车位,可以在更狭窄的道路上进行自动泊车,另

一种自动泊车控制方法、装置、电子设备和存储介质.pdf
本申请公开了一种自动泊车控制方法、装置、电子设备和存储介质,用以解决自动泊车效率低的问题。本申请提供的方案包括:接收自动泊车请求;根据自动泊车请求和目标停车场的空间占用信息规划待泊入车辆的第一泊车路径;如果监测到目标停车场内有新增空闲车位,则根据待泊入车辆的所在位置和新增空闲车位规划第二泊车路径;当第二泊车路径的泊车成本低于第一泊车路径的泊车成本时,控制待泊入车辆沿第二泊车路径自动泊车至新增空闲车位,其中,泊车成本表征待泊入车辆沿泊车路径完成自动泊车所需消耗的资源。本申请实施例的方案,能在新增空闲车位后,
自动泊车系统、自动泊车方法以及存储介质.pdf
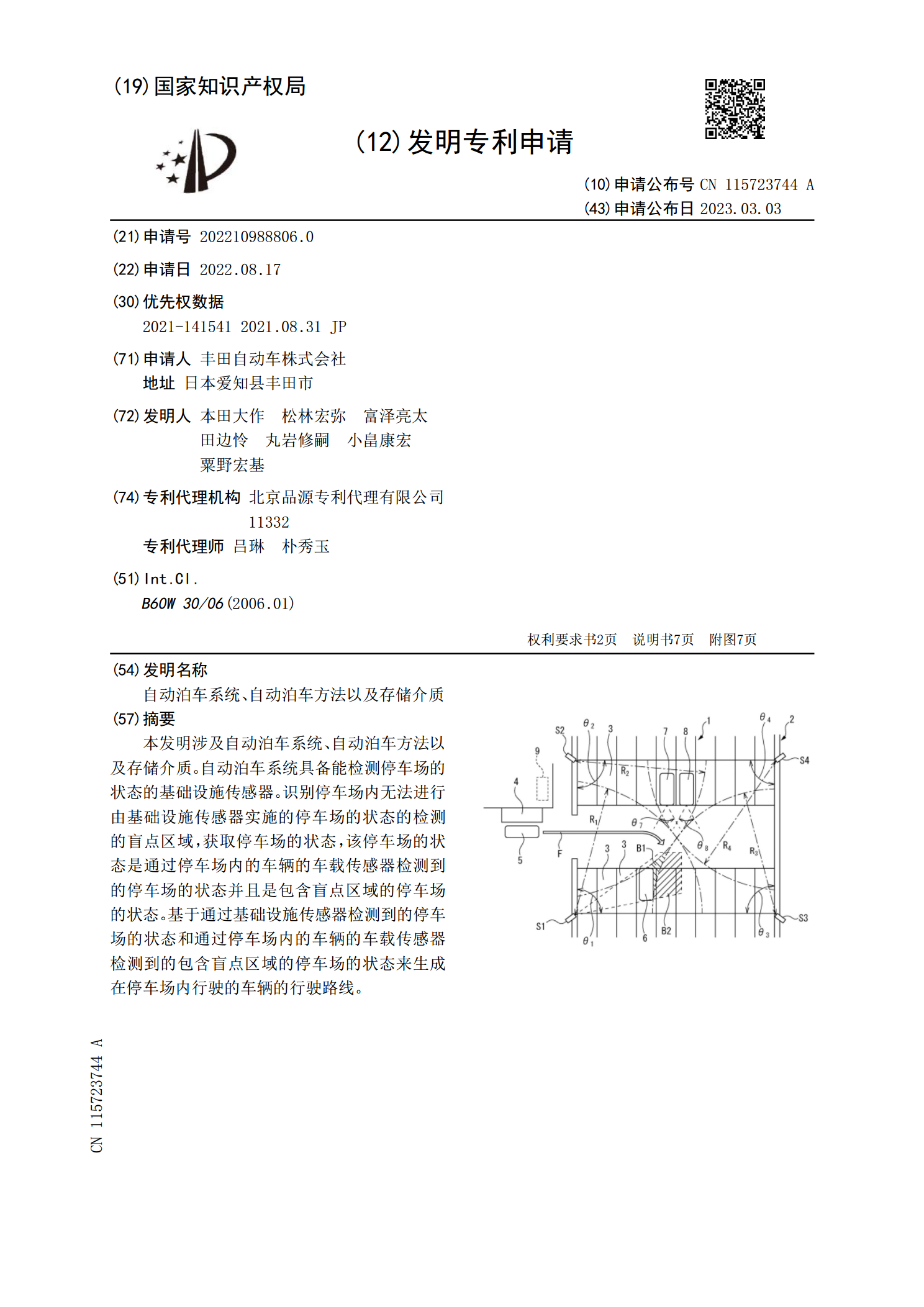
本发明涉及自动泊车系统、自动泊车方法以及存储介质。自动泊车系统具备能检测停车场的状态的基础设施传感器。识别停车场内无法进行由基础设施传感器实施的停车场的状态的检测的盲点区域,获取停车场的状态,该停车场的状态是通过停车场内的车辆的车载传感器检测到的停车场的状态并且是包含盲点区域的停车场的状态。基于通过基础设施传感器检测到的停车场的状态和通过停车场内的车辆的车载传感器检测到的包含盲点区域的停车场的状态来生成在停车场内行驶的车辆的行驶路线。