
一种基于改进人工蜂群算法的无人机路径规划方法及系统.pdf

含秀****66

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于改进人工蜂群算法的无人机路径规划方法及系统.pdf
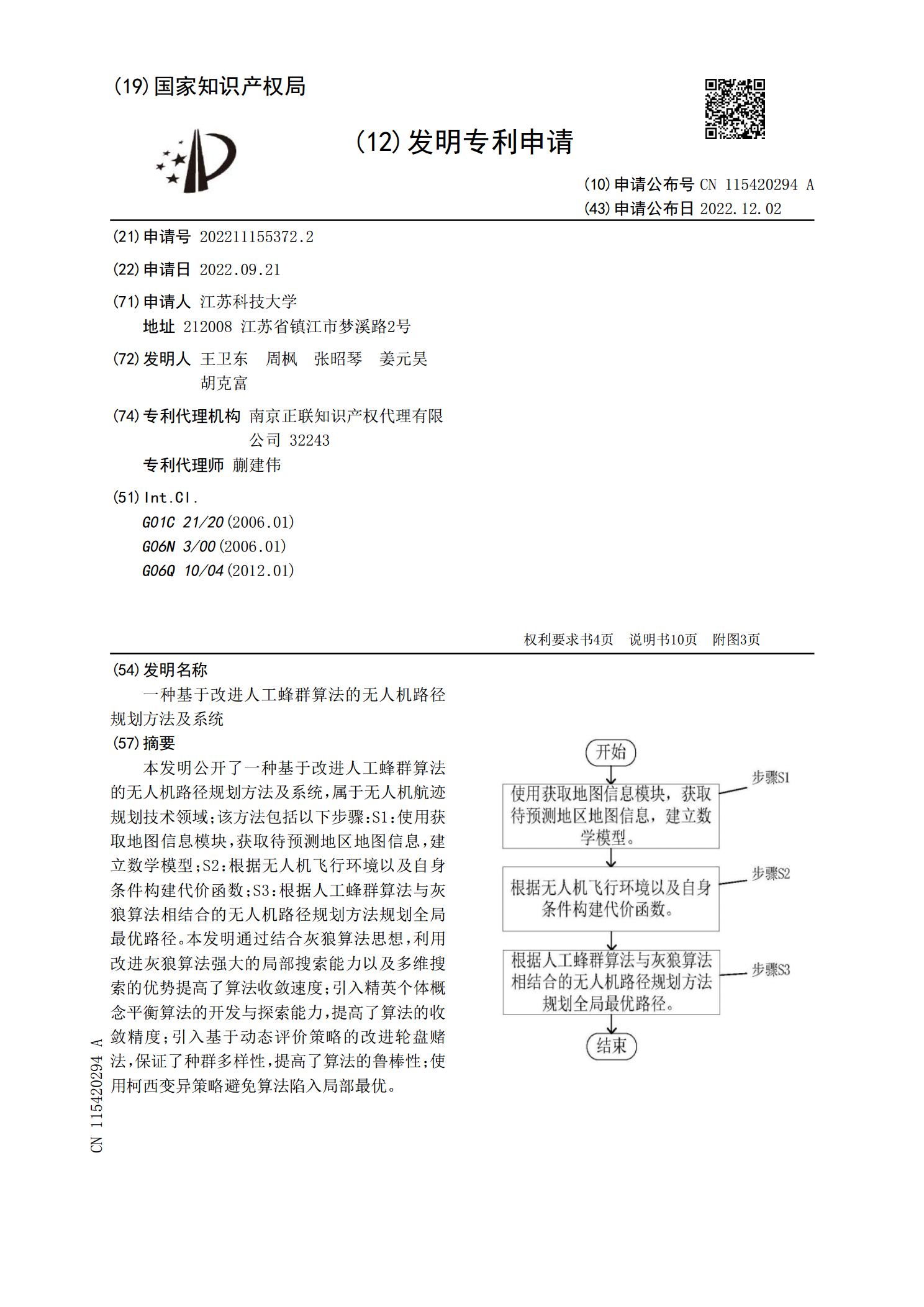
本发明公开了一种基于改进人工蜂群算法的无人机路径规划方法及系统,属于无人机航迹规划技术领域;该方法包括以下步骤:S1:使用获取地图信息模块,获取待预测地区地图信息,建立数学模型;S2:根据无人机飞行环境以及自身条件构建代价函数;S3:根据人工蜂群算法与灰狼算法相结合的无人机路径规划方法规划全局最优路径。本发明通过结合灰狼算法思想,利用改进灰狼算法强大的局部搜索能力以及多维搜索的优势提高了算法收敛速度;引入精英个体概念平衡算法的开发与探索能力,提高了算法的收敛精度;引入基于动态评价策略的改进轮盘赌法,保证了

基于改进蜂群算法的无人机路径规划.pptx
基于改进蜂群算法的无人机路径规划01添加章节标题无人机路径规划概述无人机路径规划的定义和重要性无人机路径规划的常见算法改进蜂群算法的原理及应用蜂群算法的基本原理改进蜂群算法的主要思路改进蜂群算法在无人机路径规划中的应用基于改进蜂群算法的无人机路径规划实现路径规划问题的数学模型改进蜂群算法的步骤和流程无人机路径规划的实验结果及分析与其他算法的比较和分析与传统路径规划算法的比较与其他智能优化算法的比较优缺点分析及改进方向实际应用及未来展望无人机路径规划在军事、民用领域的应用前景未来研究方向和技术发展趋势感谢观

一种基于改进人工蜂群算法的路径规划方法.pdf
本发明提供一种基于改进人工蜂群算法的路径规划方法,人工蜂群算法迭代寻优过程中存在早熟收敛等缺陷,对于人工蜂群算法改进方面,本发明首先采用新的初始化策略,从而获得较高质量的初始种群并减少寻优迭代次数;然后在传统人工蜂群算法的雇佣蜂、跟随蜂和侦察蜂三个阶段采用不同的搜索方程,既可以增强局部搜索能力,又可以避免后期寻优过程的早熟收敛;最后将改进的人工蜂群算法应用于路径规划问题,既可以保证路径的安全可靠又可以保证路径的长度最短。

一种基于改进人工蜂群算法的机器人实时路径规划方法.docx
一种基于改进人工蜂群算法的机器人实时路径规划方法摘要:本文提出了一种基于改进人工蜂群算法的机器人实时路径规划方法。该方法结合了人工蜂群算法和最小二乘法,实现了机器人在复杂环境下的高效路径规划。通过对比实验,该方法在改善机器人路径规划效率和路径质量方面取得了良好的效果。关键词:机器人路径规划,人工蜂群算法,最小二乘法,路径质量介绍:机器人路径规划是一个关键的问题,它在机器人导航和控制中扮演重要角色。由于实际环境复杂且变化无常,如何构建高效的路径规划方法成为了当前的研究方向。本文提出一种基于改进人工蜂群算法的
基于改进人工蜂群算法的生产调度方法及系统.pdf
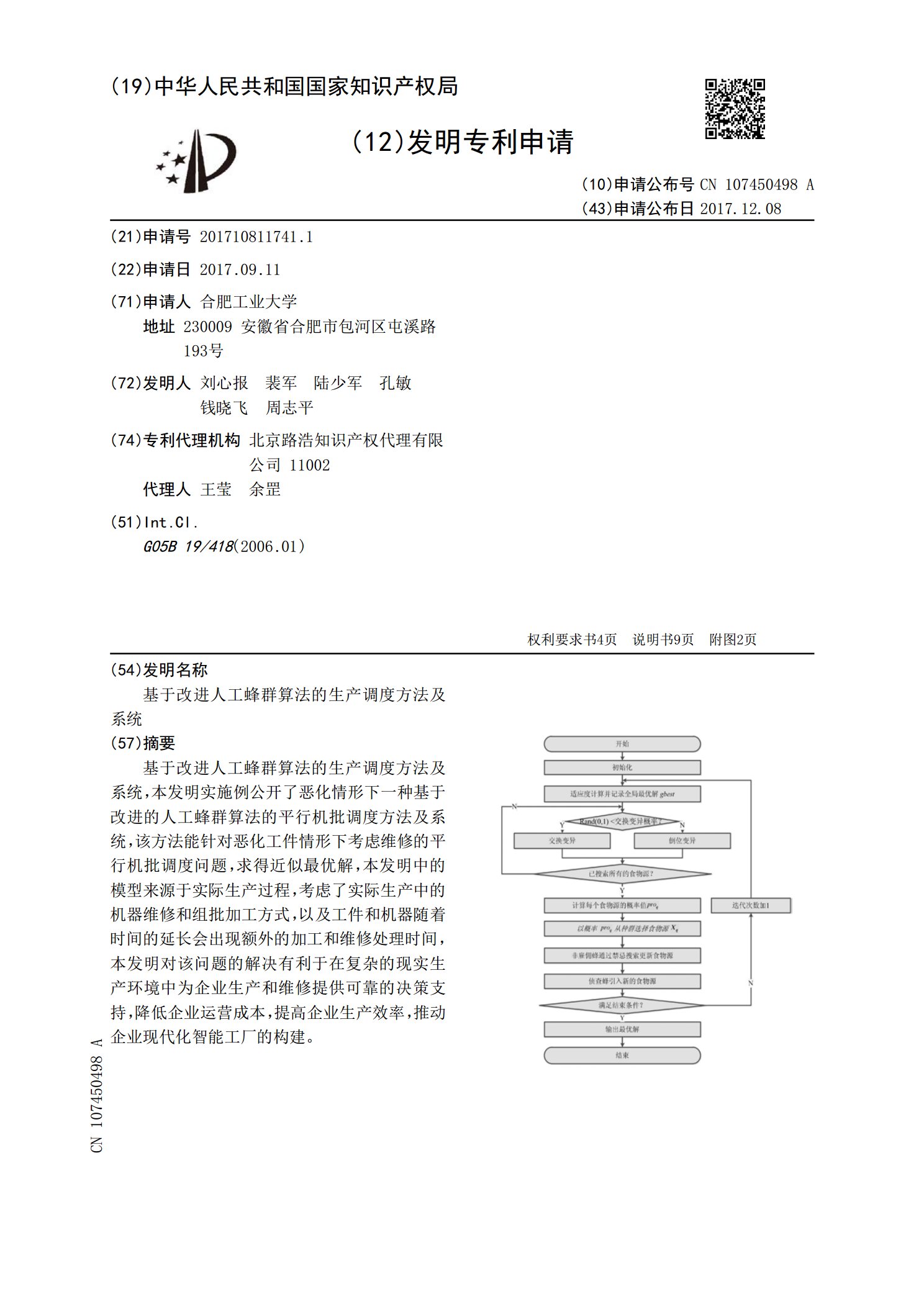
基于改进人工蜂群算法的生产调度方法及系统,本发明实施例公开了恶化情形下一种基于改进的人工蜂群算法的平行机批调度方法及系统,该方法能针对恶化工件情形下考虑维修的平行机批调度问题,求得近似最优解,本发明中的模型来源于实际生产过程,考虑了实际生产中的机器维修和组批加工方式,以及工件和机器随着时间的延长会出现额外的加工和维修处理时间,本发明对该问题的解决有利于在复杂的现实生产环境中为企业生产和维修提供可靠的决策支持,降低企业运营成本,提高企业生产效率,推动企业现代化智能工厂的构建。