
一种基于改进视觉注意机制的磁片瑕疵检测方法.pdf

一吃****新冬

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于改进视觉注意机制的磁片瑕疵检测方法.pdf
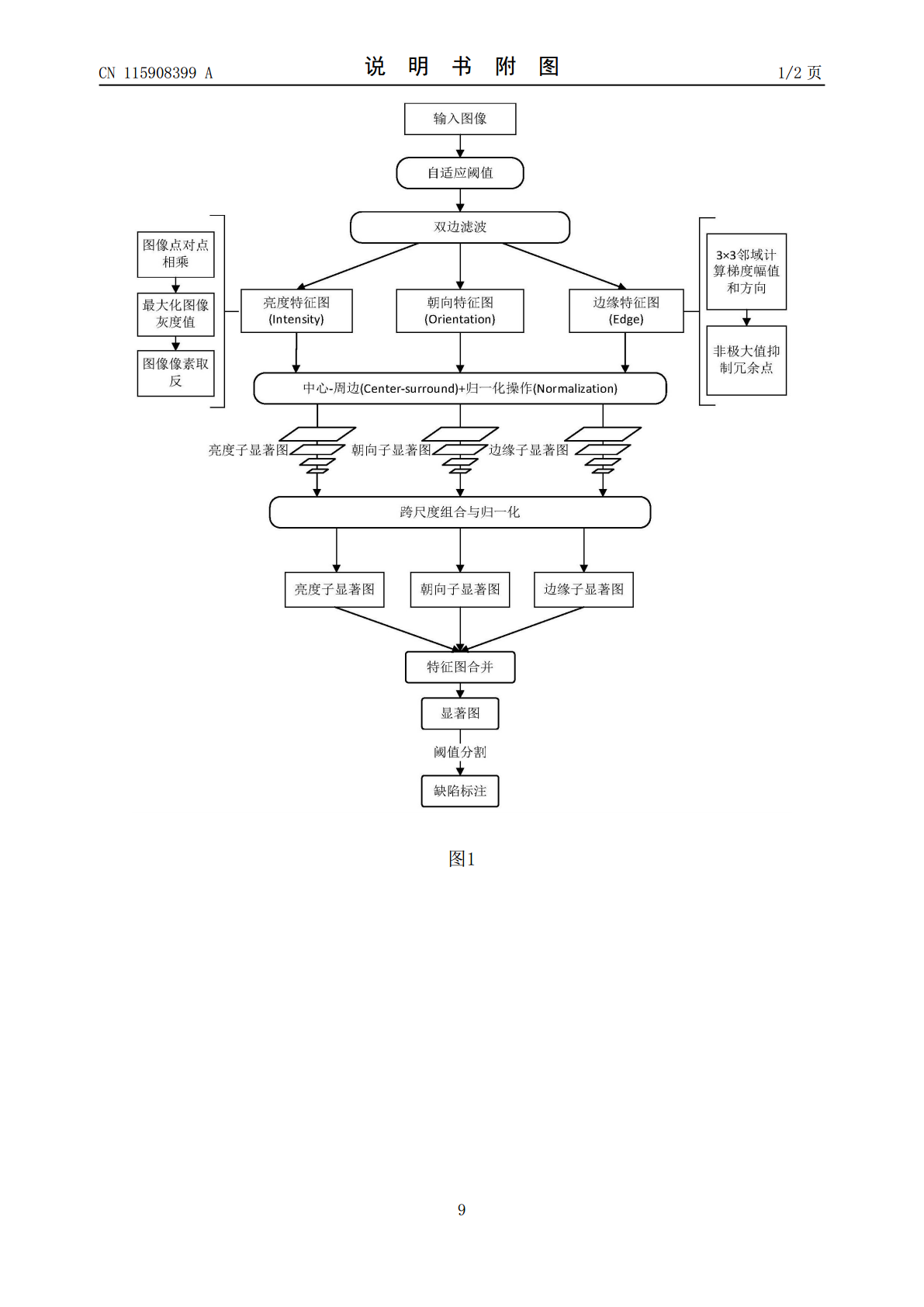
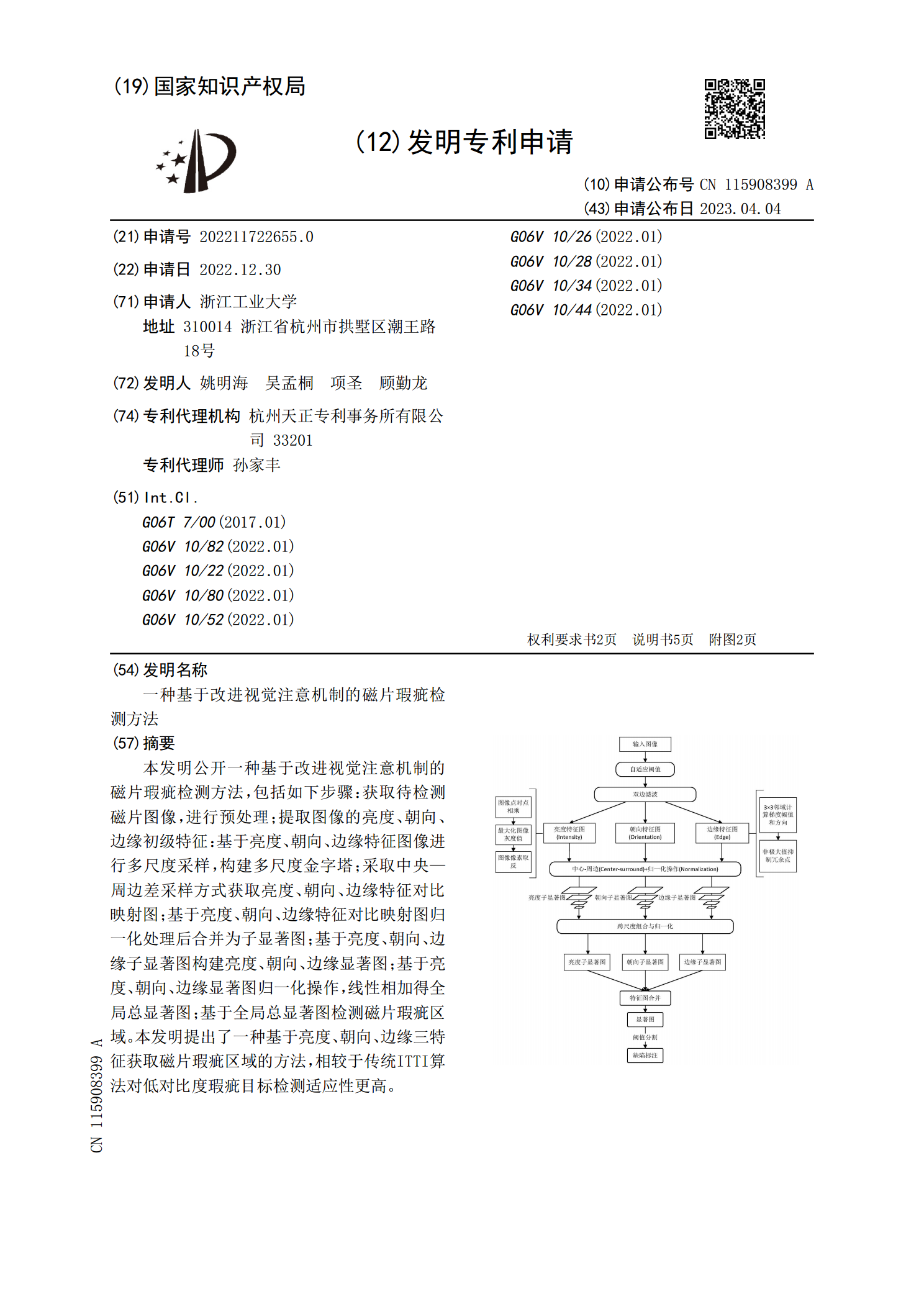
本发明公开一种基于改进视觉注意机制的磁片瑕疵检测方法,包括如下步骤:获取待检测磁片图像,进行预处理;提取图像的亮度、朝向、边缘初级特征:基于亮度、朝向、边缘特征图像进行多尺度采样,构建多尺度金字塔;采取中央—周边差采样方式获取亮度、朝向、边缘特征对比映射图;基于亮度、朝向、边缘特征对比映射图归一化处理后合并为子显著图;基于亮度、朝向、边缘子显著图构建亮度、朝向、边缘显著图;基于亮度、朝向、边缘显著图归一化操作,线性相加得全局总显著图;基于全局总显著图检测磁片瑕疵区域。本发明提出了一种基于亮度、朝向、边缘三
一种基于改进Yolov4的布料瑕疵视觉检测方法.pdf
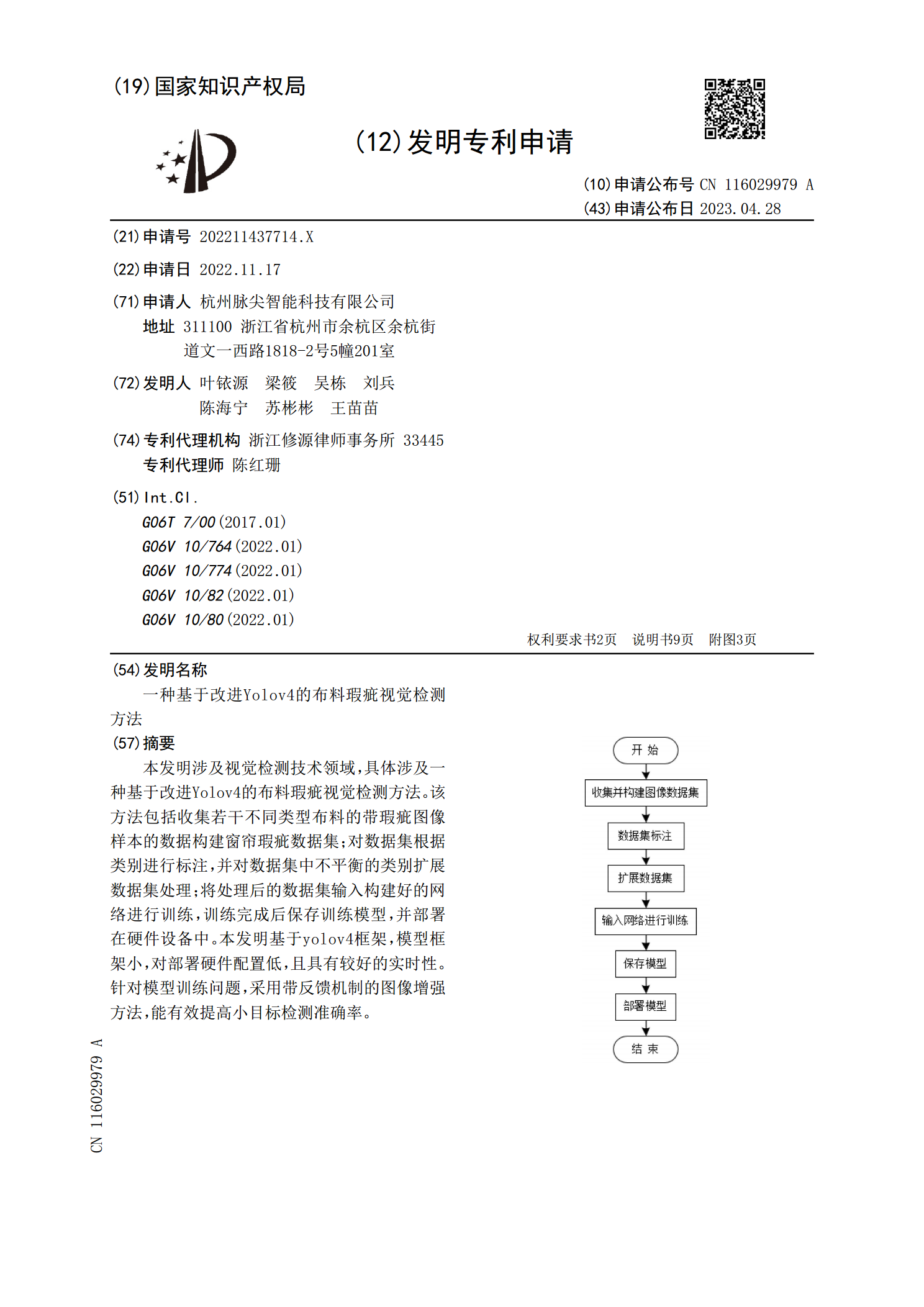
本发明涉及视觉检测技术领域,具体涉及一种基于改进Yolov4的布料瑕疵视觉检测方法。该方法包括收集若干不同类型布料的带瑕疵图像样本的数据构建窗帘瑕疵数据集;对数据集根据类别进行标注,并对数据集中不平衡的类别扩展数据集处理;将处理后的数据集输入构建好的网络进行训练,训练完成后保存训练模型,并部署在硬件设备中。本发明基于yolov4框架,模型框架小,对部署硬件配置低,且具有较好的实时性。针对模型训练问题,采用带反馈机制的图像增强方法,能有效提高小目标检测准确率。

一种基于图像视觉的轴承表面瑕疵检测方法.pdf
本发明公开一种基于图像视觉的轴承表面瑕疵检测方法,包括如下步骤:将采集到的图像读取到计算机内存,对轴承图像进行预处理,将色彩空间从RGB转换到LAB,取A分量图作为处理对象;对图像进行二值化处理,采用具有统计意义上最佳分割的OTSU算法进行阈值选取,进行二值化分割;通过对二值图像中白色像素即目标的标记,分别形成一个个被标识的块,进一步获得这些块的质心、面积、圆度值参数;对二值图像进行边缘检测,大幅度减少数据量,只保留轴承图像必要结构属性;利用霍夫变换获得轴承内圆圆心和半径参数;缺失判断。本发明能尽量减小检
一种基于视觉熵注意机制的微靶球轮廓缺陷检测方法.pdf
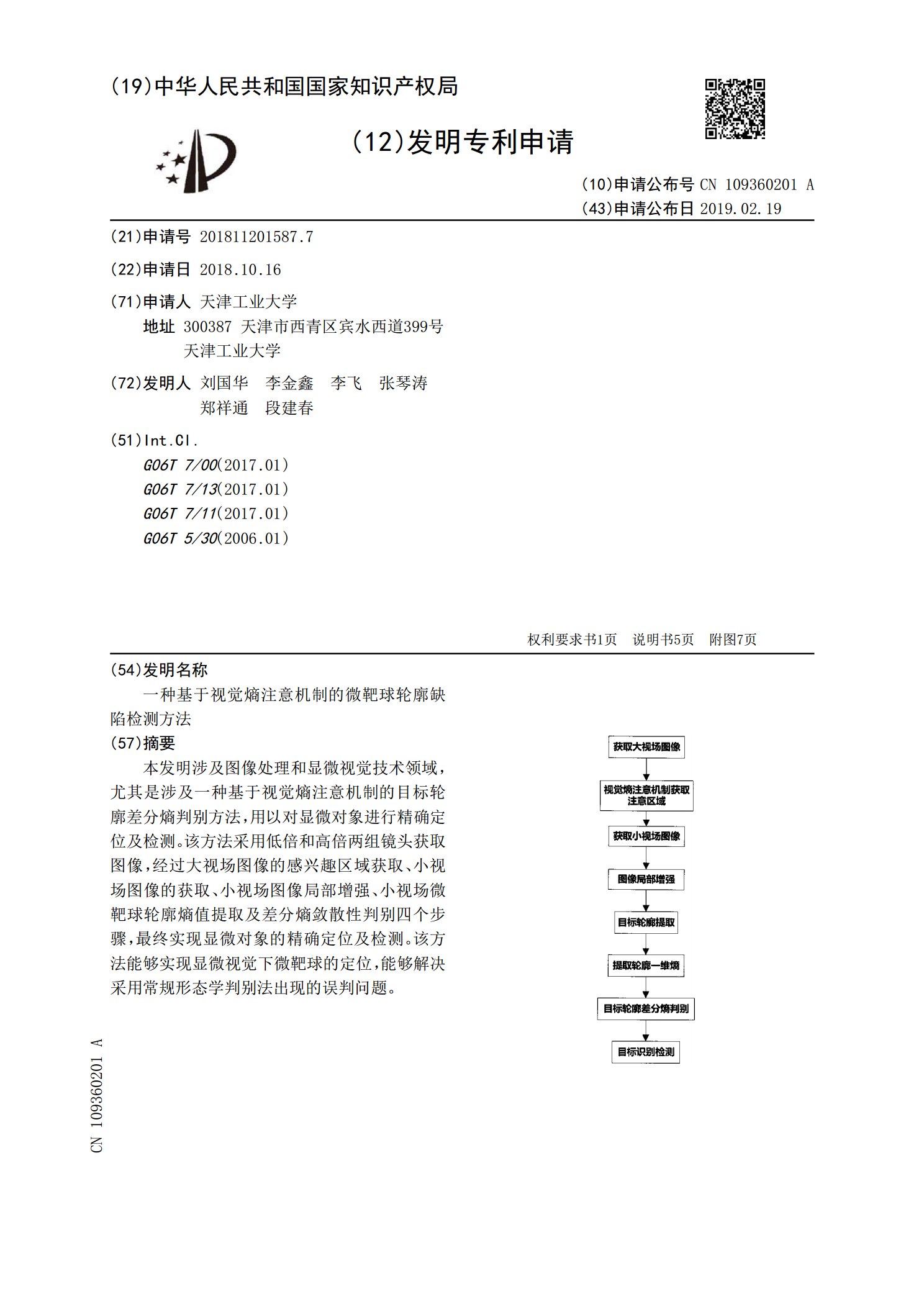
本发明涉及图像处理和显微视觉技术领域,尤其是涉及一种基于视觉熵注意机制的目标轮廓差分熵判别方法,用以对显微对象进行精确定位及检测。该方法采用低倍和高倍两组镜头获取图像,经过大视场图像的感兴趣区域获取、小视场图像的获取、小视场图像局部增强、小视场微靶球轮廓熵值提取及差分熵敛散性判别四个步骤,最终实现显微对象的精确定位及检测。该方法能够实现显微视觉下微靶球的定位,能够解决采用常规形态学判别法出现的误判问题。
一种基于视觉注意机制的高压巡线故障检测方法及系统.pdf
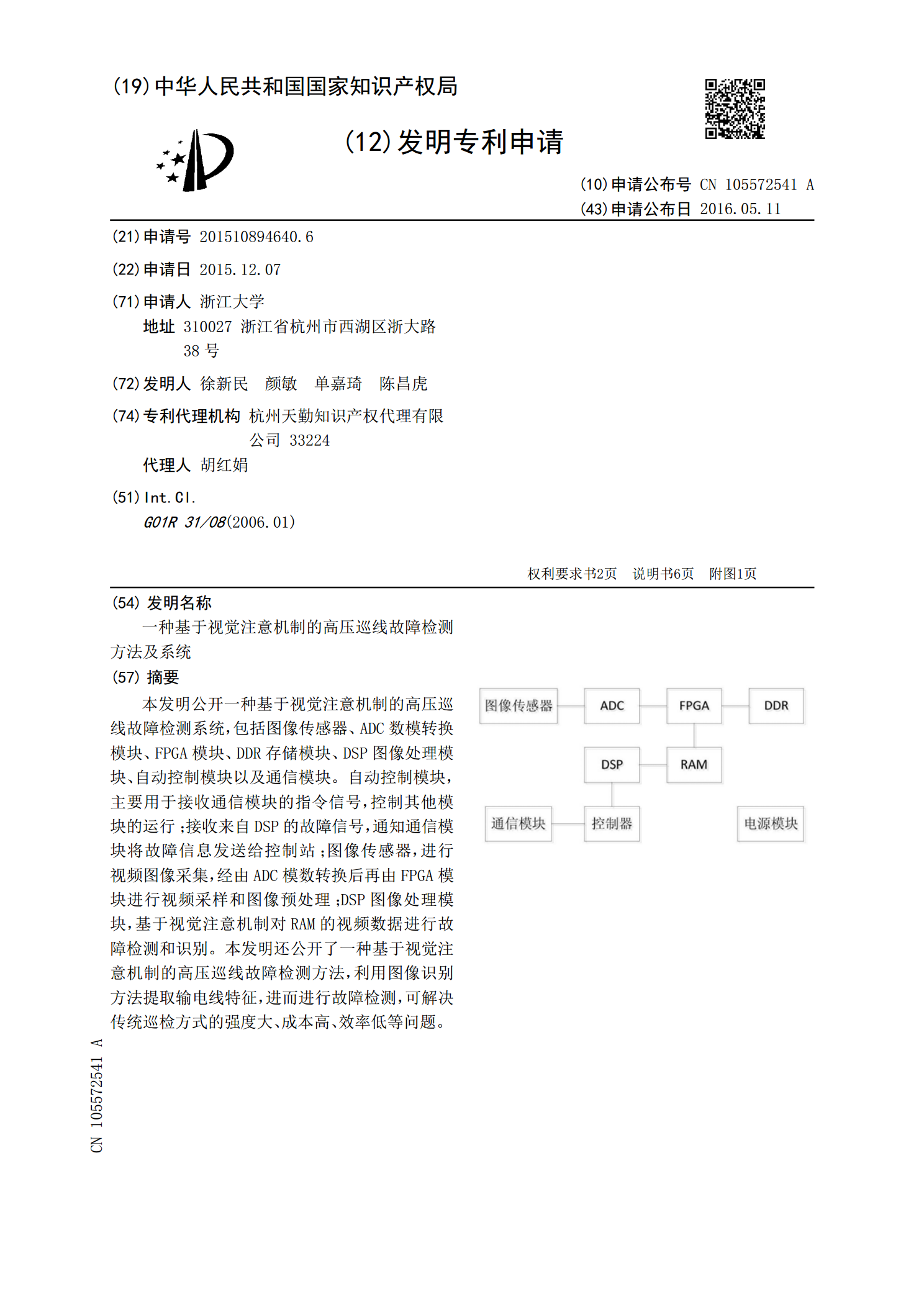
本发明公开一种基于视觉注意机制的高压巡线故障检测系统,包括图像传感器、ADC数模转换模块、FPGA模块、DDR存储模块、DSP图像处理模块、自动控制模块以及通信模块。自动控制模块,主要用于接收通信模块的指令信号,控制其他模块的运行;接收来自DSP的故障信号,通知通信模块将故障信息发送给控制站;图像传感器,进行视频图像采集,经由ADC模数转换后再由FPGA模块进行视频采样和图像预处理;DSP图像处理模块,基于视觉注意机制对RAM的视频数据进行故障检测和识别。本发明还公开了一种基于视觉注意机制的高压巡线故障检