
一种基于Voronoi图法和GPRS通信的无人机远程路径规划系统.pdf

一吃****春晓

1/9
2/9
3/9

4/9
5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于Voronoi图法和GPRS通信的无人机远程路径规划系统.pdf
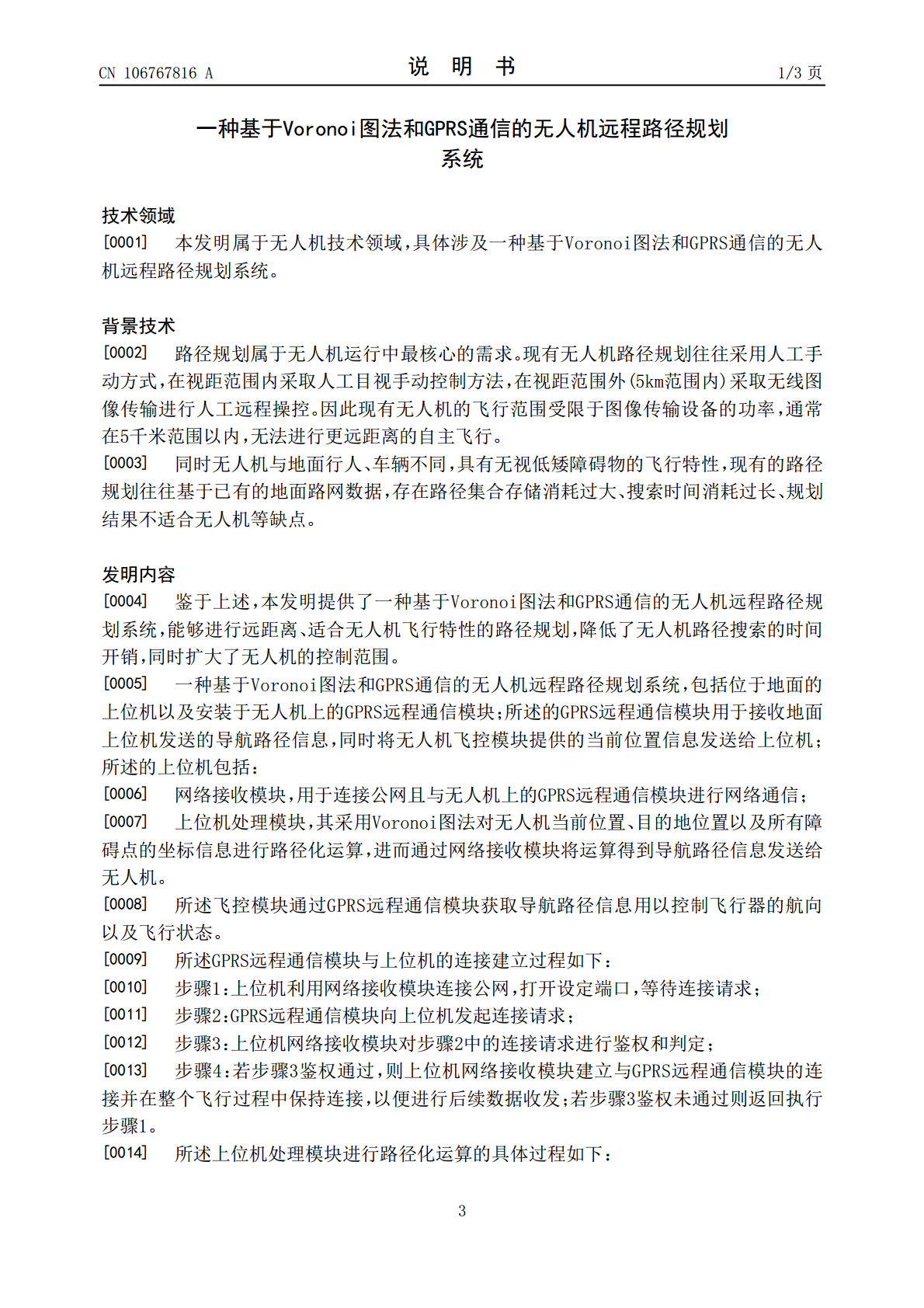
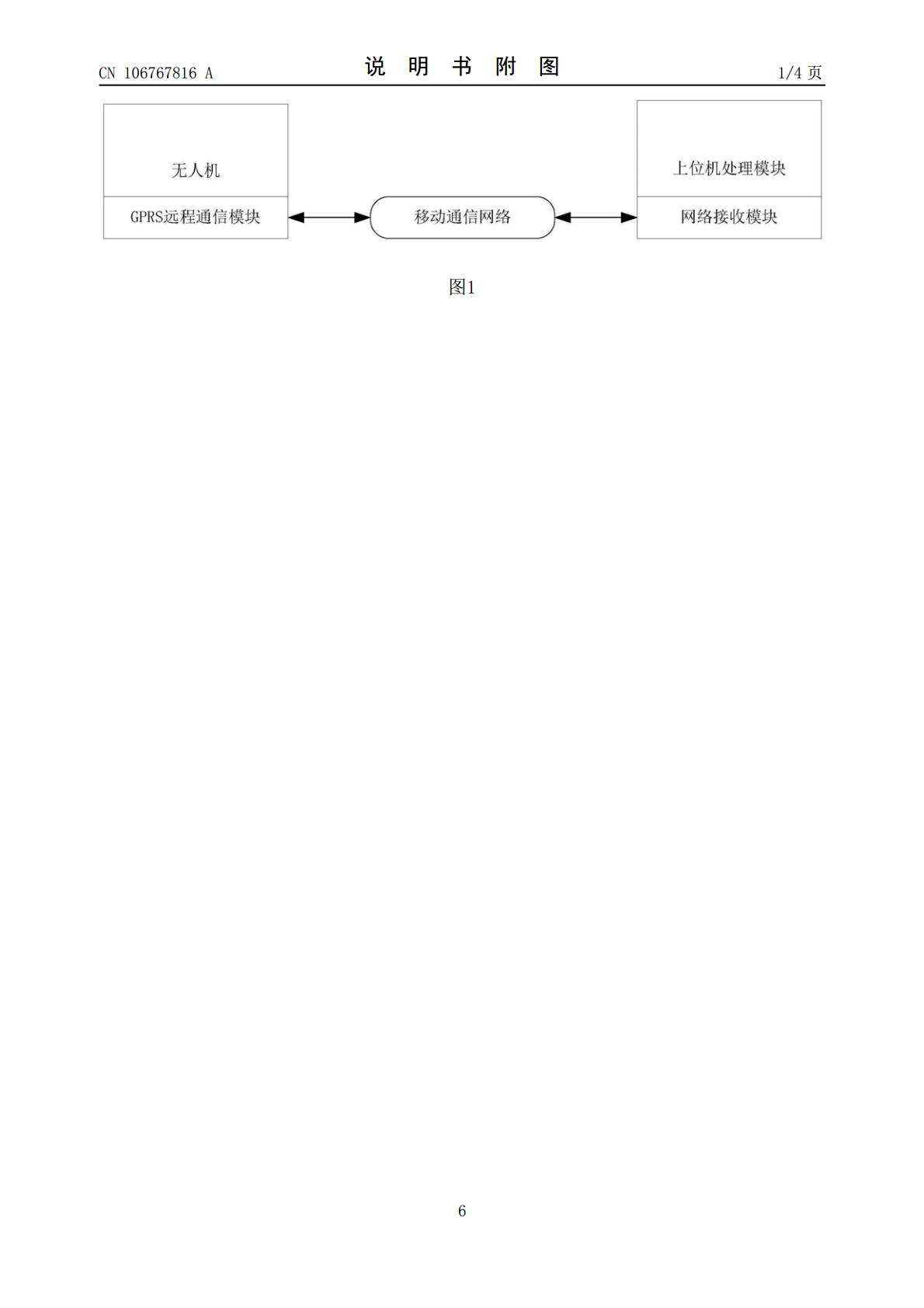
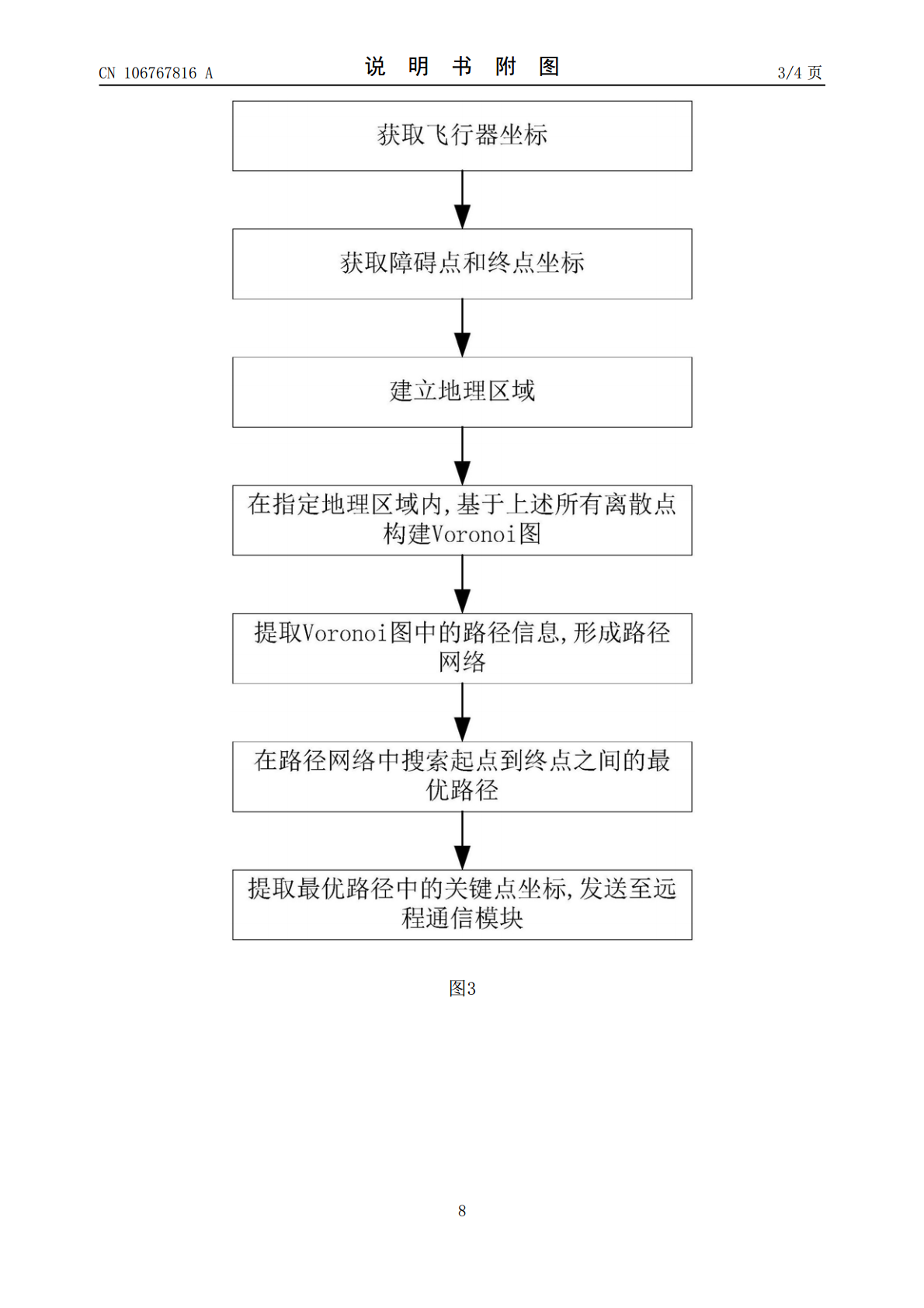
本发明公开了一种基于Voronoi图法和GPRS通信的无人机远程路径规划系统,包括GPRS远程通信模块和上位机处理模块。GPRS远程通信模块用于远程采集无人机的坐标数据,上传数据、下传控制命令;上位机处理模块用于接收来自无人机的坐标数据,结合障碍点坐标,基于voronoi图法计算联通的路网集合,通过广度优先搜索策略在路网集合中搜索最短路径,最终通过远程通信模块将路径数据远程下发至无人机。由此,本发明系统降低了无人机路径搜索的时间开销,同时扩大了无人机的控制范围。

基于Voronoi图的实时人群路径规划.docx
基于Voronoi图的实时人群路径规划在现代城市中,人口密度的不断增加以及城市化的快速发展推动了人群路径规划的需求。传统的路网规划方式难以满足多变的需求,更加实时的规划需求更是难以实现。而基于Voronoi图的实时人群路径规划则能够高效且准确地实现对人群的动态规划。Voronoi图是基于距离的分析方法,将空间分为一系列的仿形体,每个仿形体包含一个点,该点到该仿形体内所有点的欧几里德距离最近。基于此,Voronoi图有着广泛的应用,比如地理信息领域、计算机视觉领域等等。人群路径规划也可以基于Voronoi图
一种巡检无人机路径规划系统.pdf
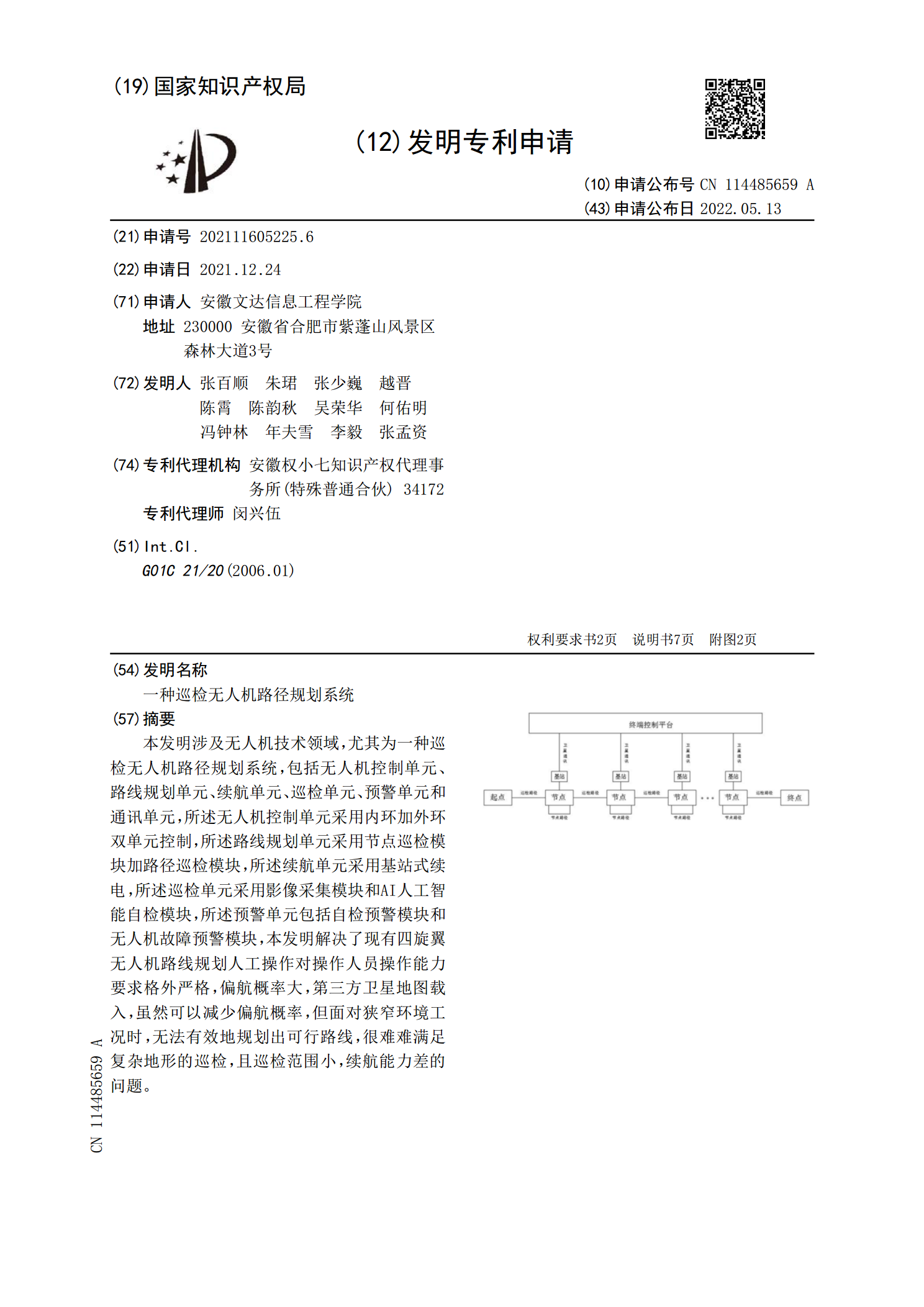
本发明涉及无人机技术领域,尤其为一种巡检无人机路径规划系统,包括无人机控制单元、路线规划单元、续航单元、巡检单元、预警单元和通讯单元,所述无人机控制单元采用内环加外环双单元控制,所述路线规划单元采用节点巡检模块加路径巡检模块,所述续航单元采用基站式续电,所述巡检单元采用影像采集模块和AI人工智能自检模块,所述预警单元包括自检预警模块和无人机故障预警模块,本发明解决了现有四旋翼无人机路线规划人工操作对操作人员操作能力要求格外严格,偏航概率大,第三方卫星地图载入,虽然可以减少偏航概率,但面对狭窄环境工况时,无

基于Voronoi图和量子粒子群算法的无人机航路规划.docx
基于Voronoi图和量子粒子群算法的无人机航路规划无人机航路规划是当前无人机研究领域的热点问题之一,也是无人机自主飞行的核心技术之一。为了精准、高效地完成指定任务,无人机需要通过规划一条合适的航路来快速完成任务。在复杂的环境中,如何规划一条安全、高效的无人机航路依旧是一个难题。为此,本文基于Voronoi图和量子粒子群算法,提出一种无人机航路规划算法。该算法利用Voronoi图优化航路的分布,通过量子粒子群算法寻找最优航路,并结合机动灵活的无人机路径规划问题,使得无人机飞行路径更加优化。本文将从以下几个

基于Voronoi图和AHP法的人防警报器选址.docx
基于Voronoi图和AHP法的人防警报器选址人防警报器选址是城市安全管理的重要环节之一,正确的选址能够提高人防警报器的覆盖率和响应速度,减少安全风险。本文将基于Voronoi图和AHP法,探讨人防警报器选址的方法和步骤。一、Voronoi图在人防警报器选址中的应用Voronoi图是一种将空间划分为多个区域的几何图形,其中每个区域内的点都离最近的输入点更近。在人防警报器选址中,可以将Voronoi图应用于确定各个报警器的覆盖范围。首先,需要确定候选报警器的位置。通过分析城市的地理信息、人流密集区域和犯罪数