
一种巡检无人机路径规划系统.pdf

春岚****23

1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种巡检无人机路径规划系统.pdf
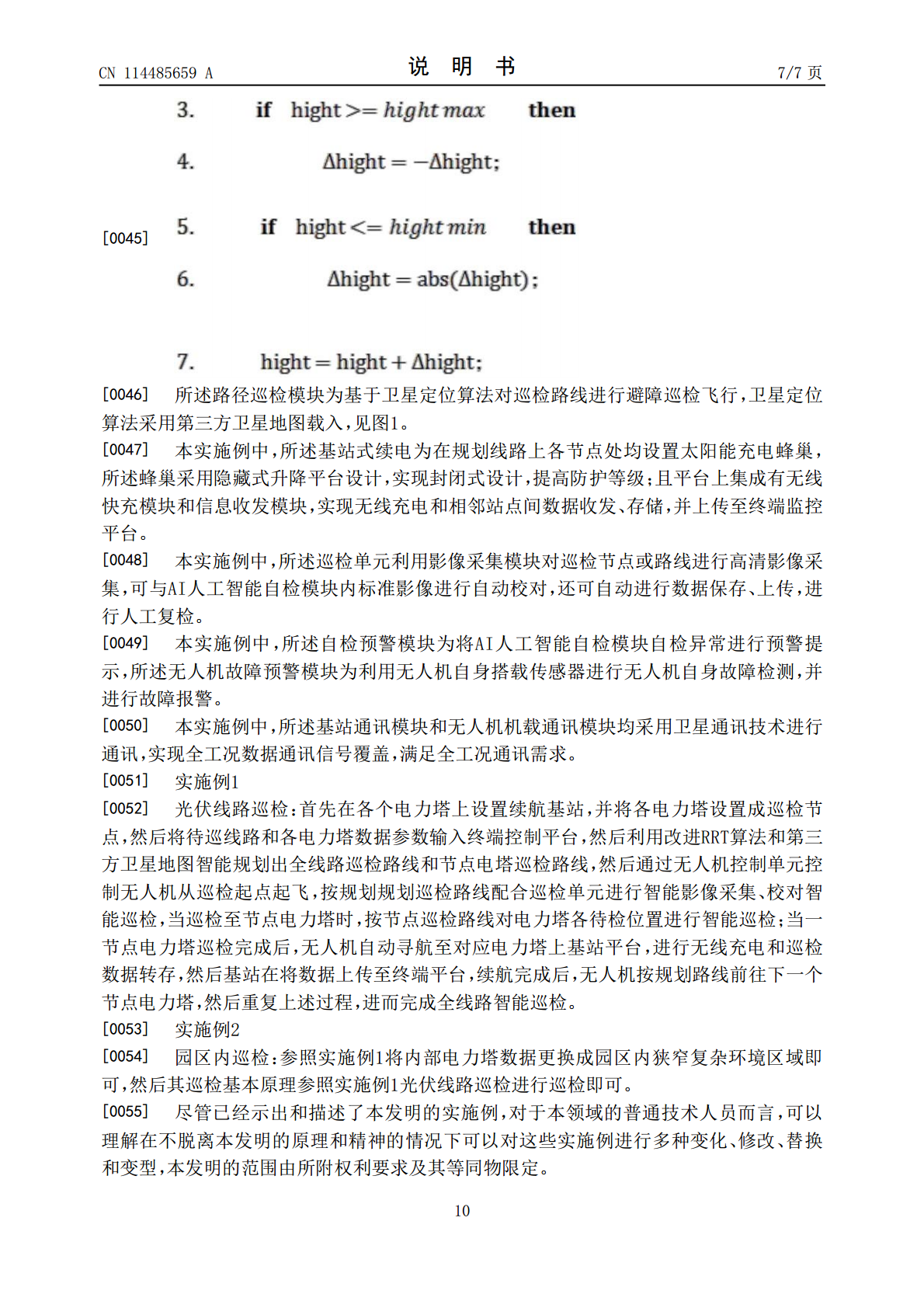
本发明涉及无人机技术领域,尤其为一种巡检无人机路径规划系统,包括无人机控制单元、路线规划单元、续航单元、巡检单元、预警单元和通讯单元,所述无人机控制单元采用内环加外环双单元控制,所述路线规划单元采用节点巡检模块加路径巡检模块,所述续航单元采用基站式续电,所述巡检单元采用影像采集模块和AI人工智能自检模块,所述预警单元包括自检预警模块和无人机故障预警模块,本发明解决了现有四旋翼无人机路线规划人工操作对操作人员操作能力要求格外严格,偏航概率大,第三方卫星地图载入,虽然可以减少偏航概率,但面对狭窄环境工况时,无

变电站巡检机器人路径规划系统设计与实现.docx
变电站巡检机器人路径规划系统设计与实现随着现代化技术的不断发展和应用,机器人技术已经广泛应用于各种领域,其中包括电力行业。而在电力行业中,变电站是电力系统中最关键的组成部分之一。变电站的正常运行对保障电网的安全、稳定运行意义非常重大。然而,由于变电站设备数量众多、体积较大、布局复杂,因此变电站的巡检非常耗时、耗力、费时费力。为了解决这些问题,可以考虑利用机器人技术对变电站进行巡检。机器人巡检可以节省人力物力成本,提高巡检效率,降低人为差错,保障变电站安全运行。本文将针对变电站巡检机器人路径规划系统的设计与
车辆与无人机协同巡检的路径规划方法及系统.pdf
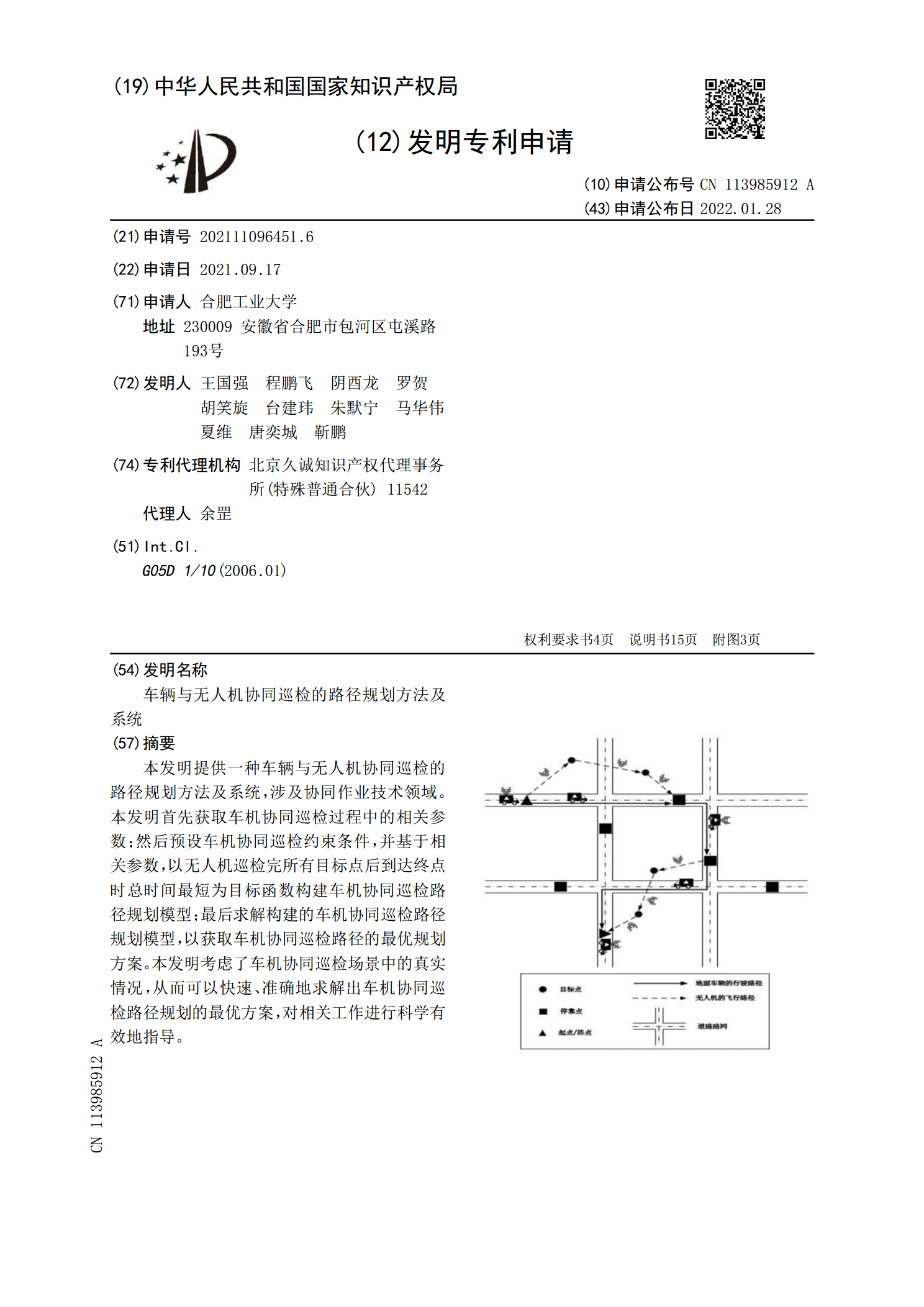
本发明提供一种车辆与无人机协同巡检的路径规划方法及系统,涉及协同作业技术领域。本发明首先获取车机协同巡检过程中的相关参数;然后预设车机协同巡检约束条件,并基于相关参数,以无人机巡检完所有目标点后到达终点时总时间最短为目标函数构建车机协同巡检路径规划模型;最后求解构建的车机协同巡检路径规划模型,以获取车机协同巡检路径的最优规划方案。本发明考虑了车机协同巡检场景中的真实情况,从而可以快速、准确地求解出车机协同巡检路径规划的最优方案,对相关工作进行科学有效地指导。
一种巡检无人机.pdf
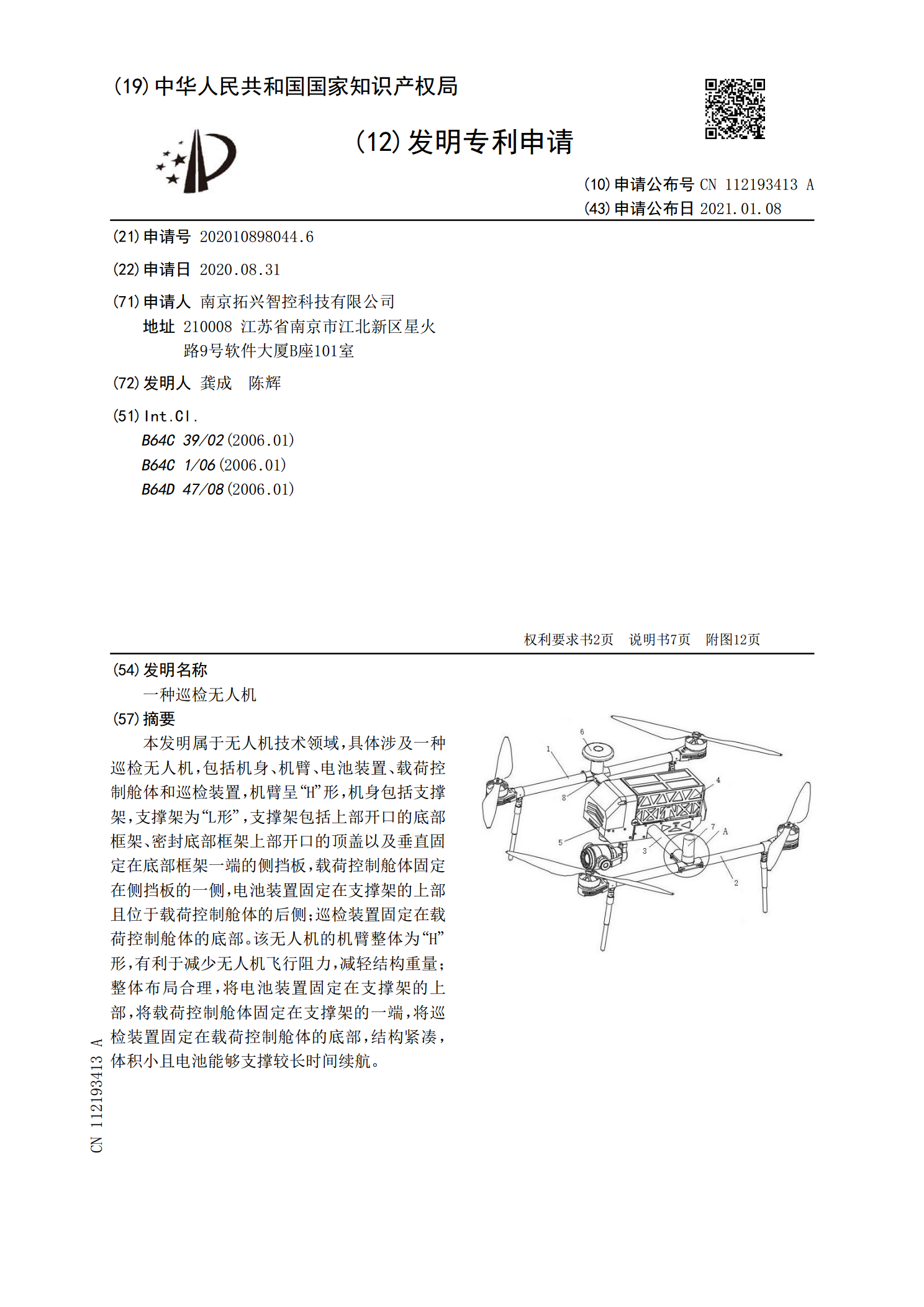
本发明属于无人机技术领域,具体涉及一种巡检无人机,包括机身、机臂、电池装置、载荷控制舱体和巡检装置,机臂呈“H”形,机身包括支撑架,支撑架为“L形”,支撑架包括上部开口的底部框架、密封底部框架上部开口的顶盖以及垂直固定在底部框架一端的侧挡板,载荷控制舱体固定在侧挡板的一侧,电池装置固定在支撑架的上部且位于载荷控制舱体的后侧;巡检装置固定在载荷控制舱体的底部。该无人机的机臂整体为“H”形,有利于减少无人机飞行阻力,减轻结构重量;整体布局合理,将电池装置固定在支撑架的上部,将载荷控制舱体固定在支撑架的一端,将
一种基于Voronoi图法和GPRS通信的无人机远程路径规划系统.pdf
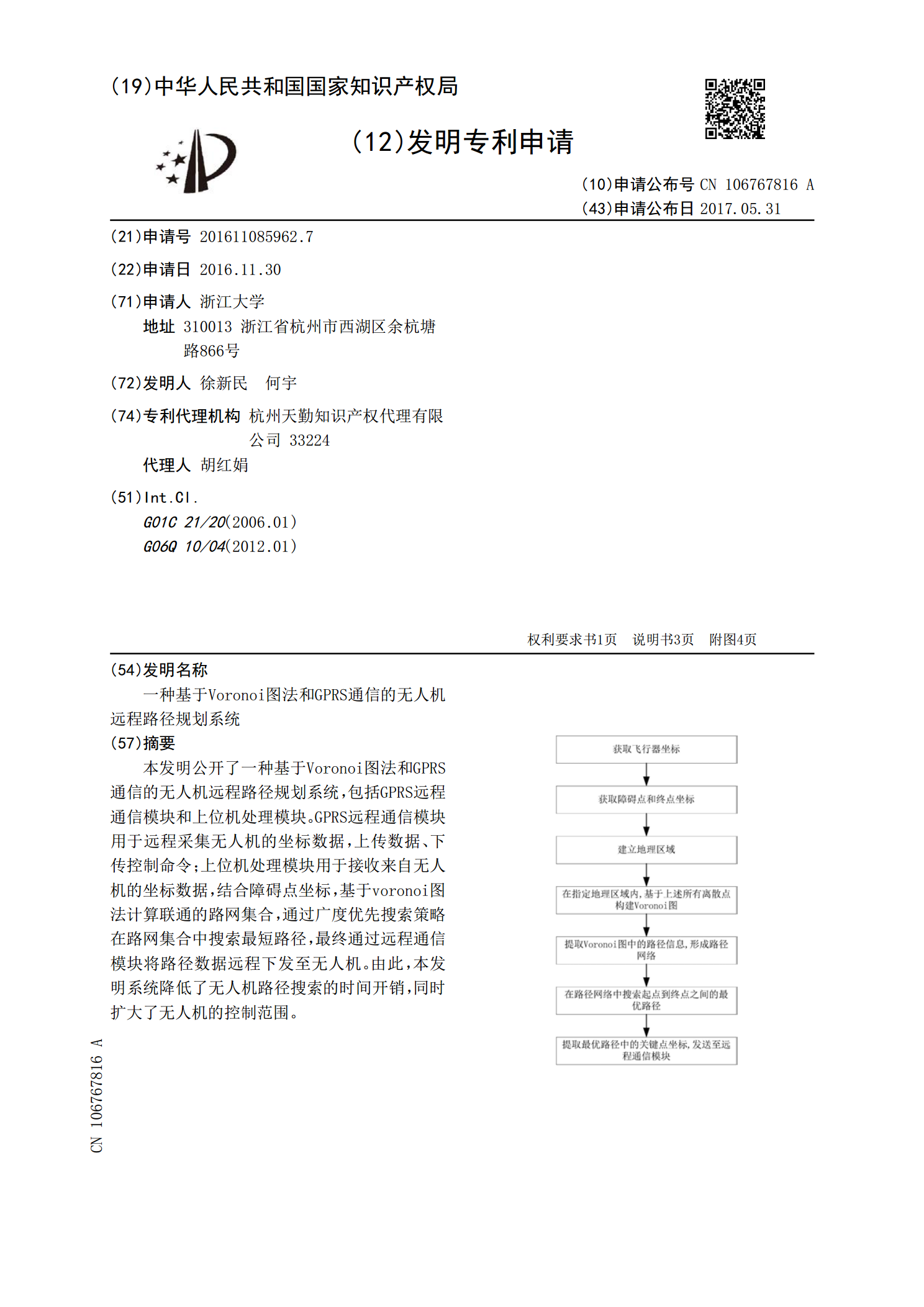
本发明公开了一种基于Voronoi图法和GPRS通信的无人机远程路径规划系统,包括GPRS远程通信模块和上位机处理模块。GPRS远程通信模块用于远程采集无人机的坐标数据,上传数据、下传控制命令;上位机处理模块用于接收来自无人机的坐标数据,结合障碍点坐标,基于voronoi图法计算联通的路网集合,通过广度优先搜索策略在路网集合中搜索最短路径,最终通过远程通信模块将路径数据远程下发至无人机。由此,本发明系统降低了无人机路径搜索的时间开销,同时扩大了无人机的控制范围。