
基于Voronoi图和量子粒子群算法的无人机航路规划.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Voronoi图和量子粒子群算法的无人机航路规划.docx
基于Voronoi图和量子粒子群算法的无人机航路规划无人机航路规划是当前无人机研究领域的热点问题之一,也是无人机自主飞行的核心技术之一。为了精准、高效地完成指定任务,无人机需要通过规划一条合适的航路来快速完成任务。在复杂的环境中,如何规划一条安全、高效的无人机航路依旧是一个难题。为此,本文基于Voronoi图和量子粒子群算法,提出一种无人机航路规划算法。该算法利用Voronoi图优化航路的分布,通过量子粒子群算法寻找最优航路,并结合机动灵活的无人机路径规划问题,使得无人机飞行路径更加优化。本文将从以下几个

基于Voronoi图与Bezier曲线算法的反舰导弹航路规划方法.docx
基于Voronoi图与Bezier曲线算法的反舰导弹航路规划方法基于Voronoi图与Bezier曲线算法的反舰导弹航路规划方法摘要:针对反舰导弹航路规划问题,本论文提出了一种基于Voronoi图与Bezier曲线算法的新方法。该方法利用Voronoi图构建目标领域的六边形分割图,通过Bezier曲线算法将各个分割区域连接成平滑的航路。实验结果表明,该方法能够有效规划导弹的航路,提升导弹的目标命中率。关键词:Voronoi图、Bezier曲线、反舰导弹、航路规划、目标命中率1.引言反舰导弹的航路规划是提高
基于威胁场Voronoi图的无人机蜂群航路规划方法.pdf
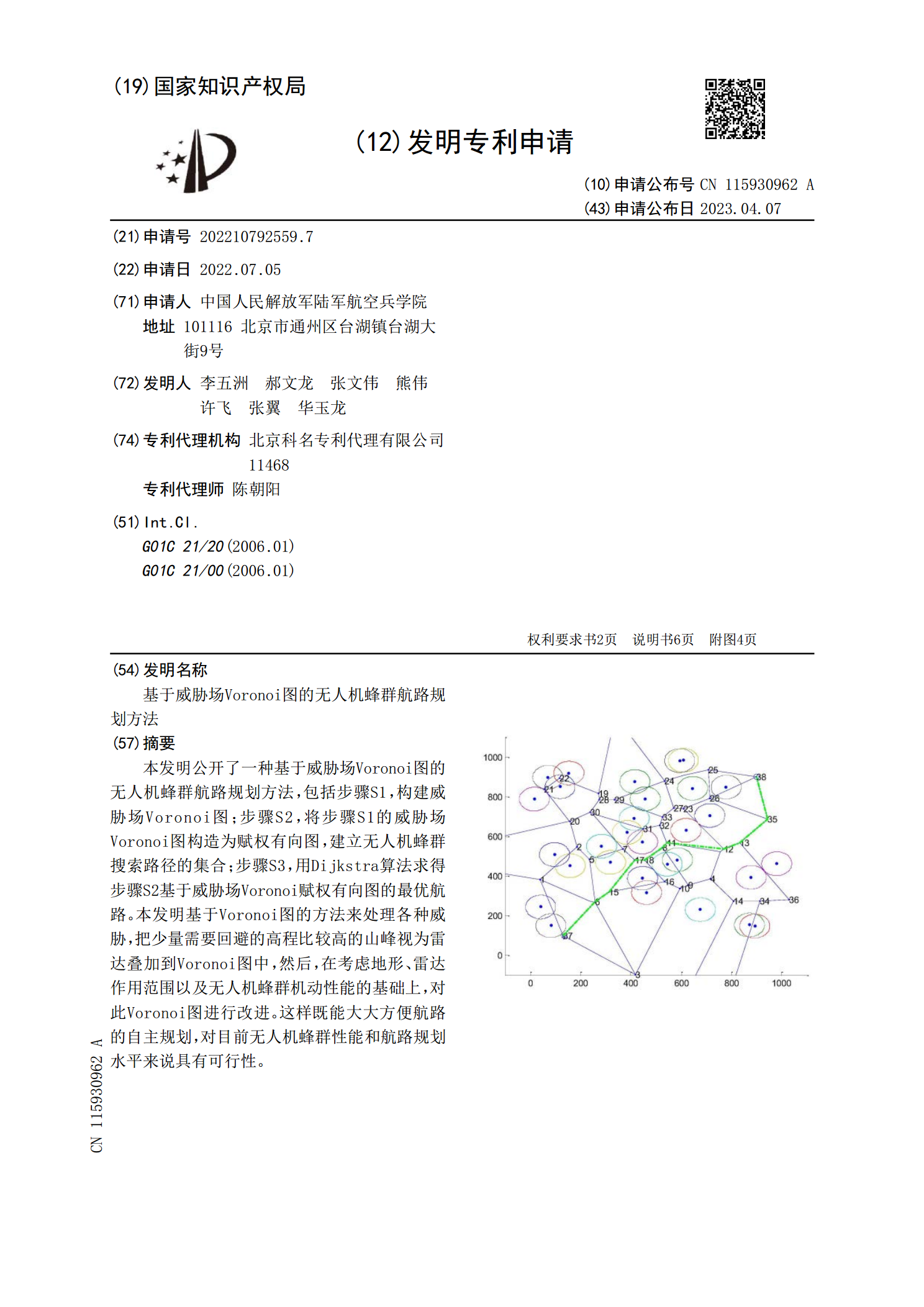
本发明公开了一种基于威胁场Voronoi图的无人机蜂群航路规划方法,包括步骤S1,构建威胁场Voronoi图;步骤S2,将步骤S1的威胁场Voronoi图构造为赋权有向图,建立无人机蜂群搜索路径的集合;步骤S3,用Dijkstra算法求得步骤S2基于威胁场Voronoi赋权有向图的最优航路。本发明基于Voronoi图的方法来处理各种威胁,把少量需要回避的高程比较高的山峰视为雷达叠加到Voronoi图中,然后,在考虑地形、雷达作用范围以及无人机蜂群机动性能的基础上,对此Voronoi图进行改进。这样既能大大

一种基于Voronoi图的航路规划方法.docx
一种基于Voronoi图的航路规划方法航路规划是民航领域中的一个重要问题,航路规划的目标是以尽可能短的时间和最小的安全风险,完成飞行任务。在传统的航路规划过程中,需要考虑到多个因素,如航线长度、空域限制、天气情况等,因此航路规划的复杂度非常高。为了降低航路规划的复杂度,有研究人员提出了几种新的航路规划方法,其中基于Voronoi图的航路规划方法是一种比较新颖的方法,本文将围绕此方法展开讨论。Voronoi图是一种计算几何学的重要工具,它是由一组点所组成的区域,这些区域中任意一点到它原本所在的点的距离都不大

基于改进粒子群算法和VORONOI图的无线传感器网络覆盖研究.docx
基于改进粒子群算法和VORONOI图的无线传感器网络覆盖研究无线传感器网络是由大量小型传感器组成的自组织网络,可应用于环境监测、物联网、智慧城市等领域。在这些应用中,网络覆盖问题十分关键。网络覆盖研究的目标是在尽可能少的节点和较小的能源消耗下,实现对目标区域的有效监测和控制。本文将介绍一种基于改进粒子群算法和VORONOI图的无线传感器网络覆盖研究。1.粒子群算法粒子群算法(PSO)是一种群智能优化算法,可以优化目标函数、进行非线性优化和约束优化。该算法模拟了鸟群在搜索食物时的行为,每只鸟作为一个“粒子”