
多台结构光模组深度重建方法、系统、设备及介质.pdf

一只****ua


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多台结构光模组深度重建方法、系统、设备及介质.pdf
本发明提供了一种多台结构光模组深度重建方法、系统、设备及介质,包括:深度重建模块,用于通过至少两台结构光模组向同一目标投射结构光,采集结构光图案进行深度重建生成深度图像,当深度图像重建失败时触发密度计算模块;密度计算模块,用于获取结构光图案,判断结构光图案中光斑的密度是否大于预设置的密度阈值,且当密度大于预设置的密度阈值时触发时序调整模块;时序调整模块,用于对每一结构光模组的光束投射接收时序分别增加或减少一随机调节时间,且触发深度重建模块控制至少两台结构光模组向同一目标投射结构光图案,根据结构光图案进行深
多台结构光模组深度重建系统.pdf
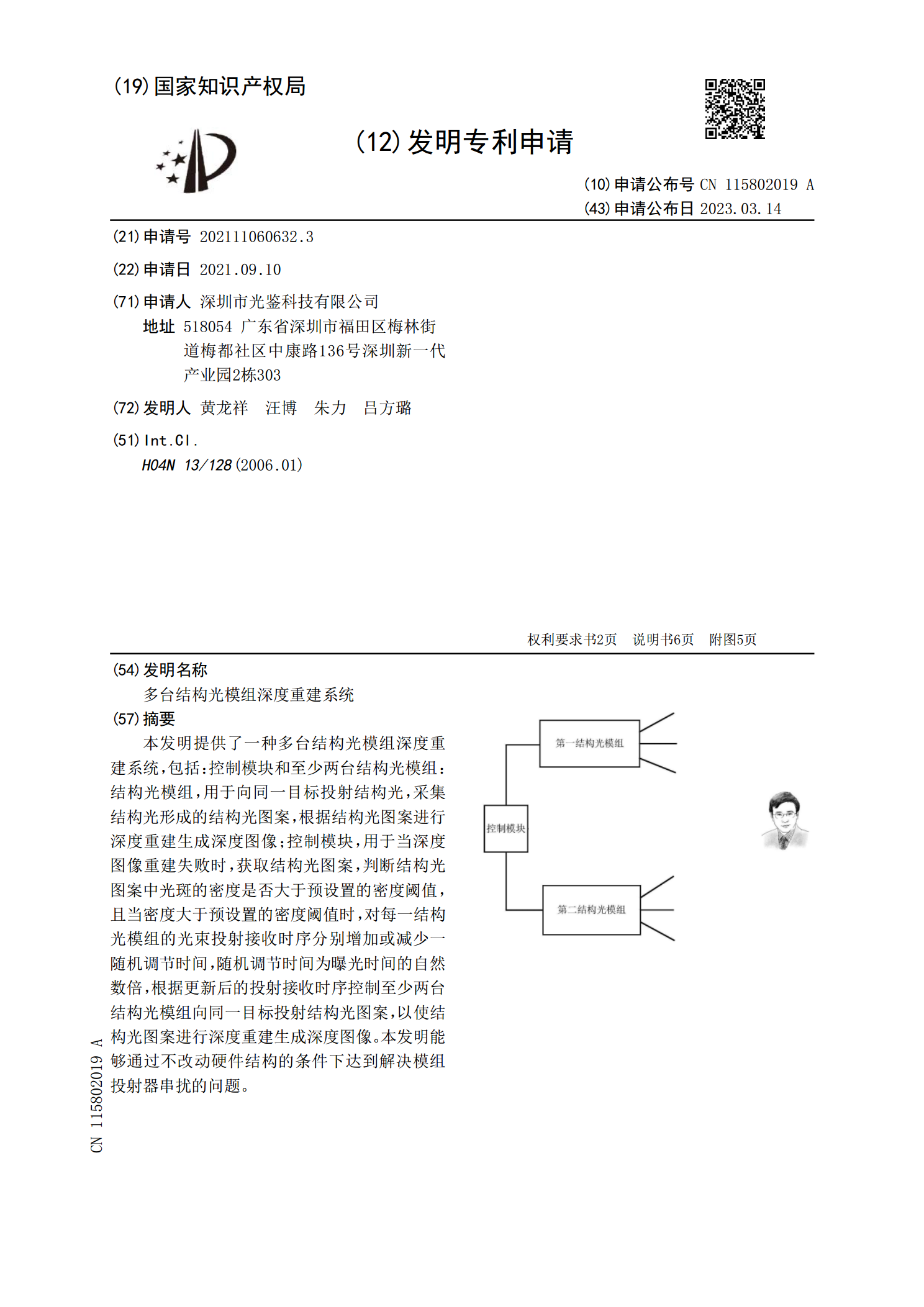
本发明提供了一种多台结构光模组深度重建系统,包括:控制模块和至少两台结构光模组:结构光模组,用于向同一目标投射结构光,采集结构光形成的结构光图案,根据结构光图案进行深度重建生成深度图像;控制模块,用于当深度图像重建失败时,获取结构光图案,判断结构光图案中光斑的密度是否大于预设置的密度阈值,且当密度大于预设置的密度阈值时,对每一结构光模组的光束投射接收时序分别增加或减少一随机调节时间,随机调节时间为曝光时间的自然数倍,根据更新后的投射接收时序控制至少两台结构光模组向同一目标投射结构光图案,以使结构光图案进行
结构光重建模组.pdf
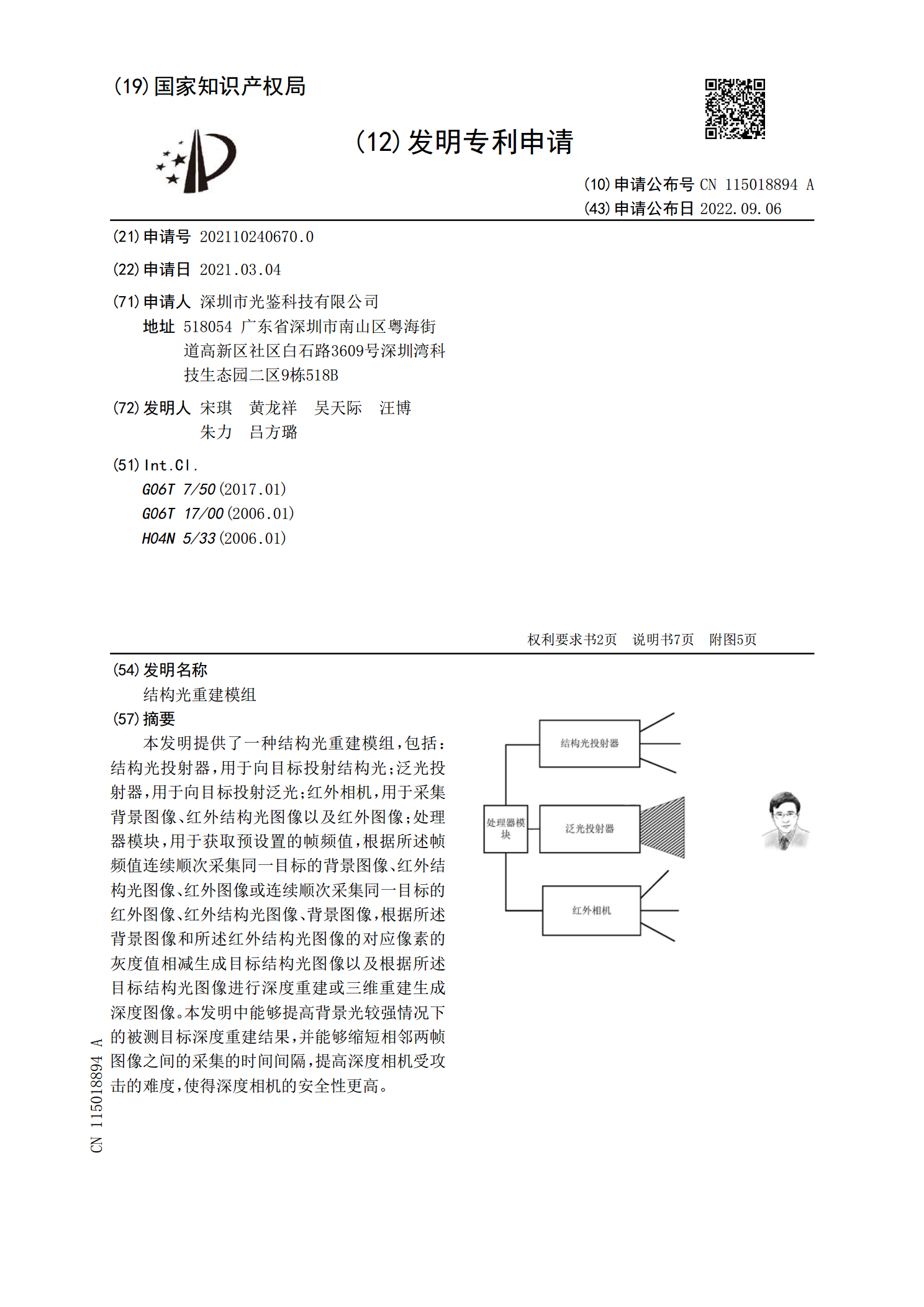
本发明提供了一种结构光重建模组,包括:结构光投射器,用于向目标投射结构光;泛光投射器,用于向目标投射泛光;红外相机,用于采集背景图像、红外结构光图像以及红外图像;处理器模块,用于获取预设置的帧频值,根据所述帧频值连续顺次采集同一目标的背景图像、红外结构光图像、红外图像或连续顺次采集同一目标的红外图像、红外结构光图像、背景图像,根据所述背景图像和所述红外结构光图像的对应像素的灰度值相减生成目标结构光图像以及根据所述目标结构光图像进行深度重建或三维重建生成深度图像。本发明中能够提高背景光较强情况下的被测目标深
深度重建方法、系统、设备及存储介质.pdf
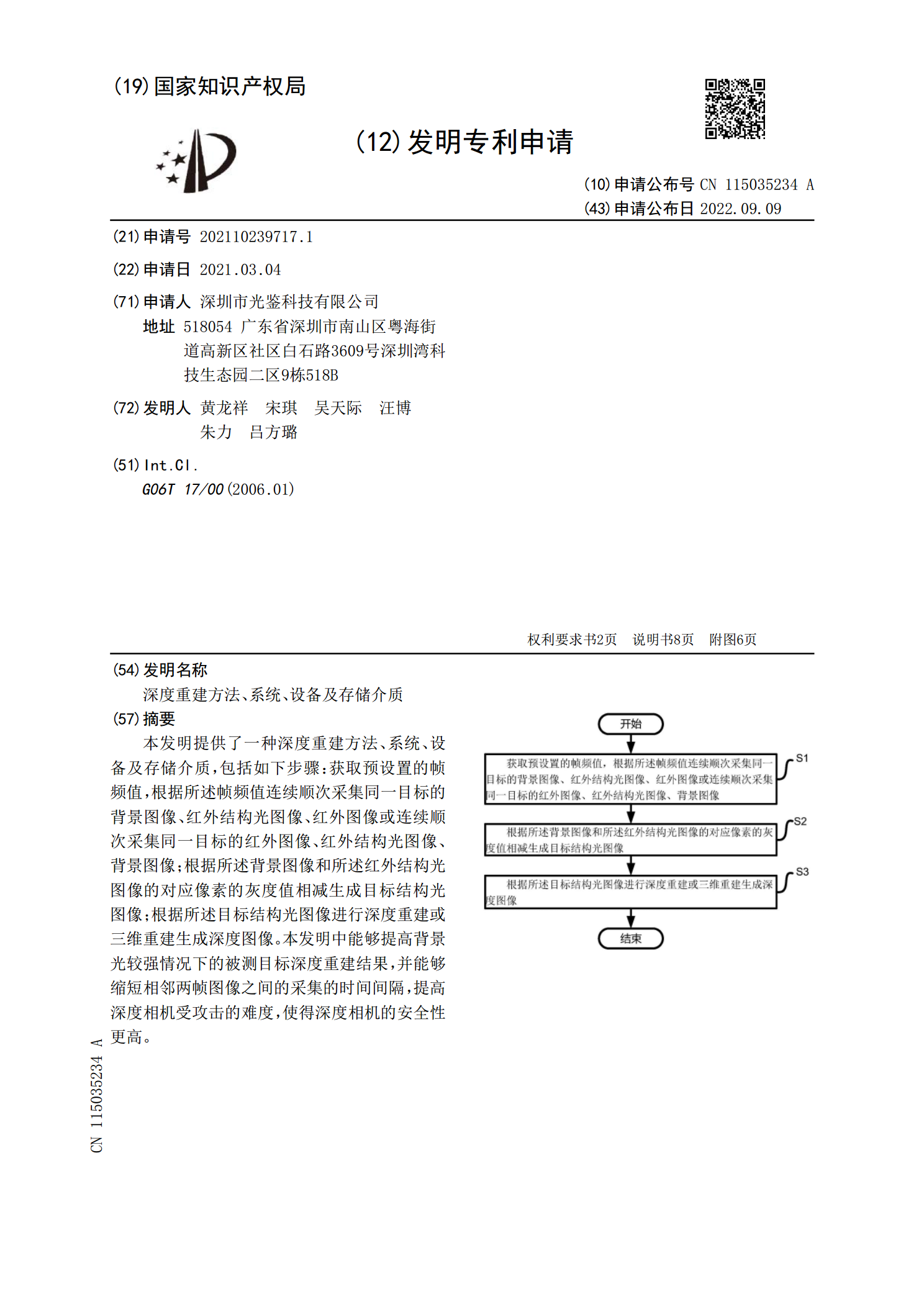
本发明提供了一种深度重建方法、系统、设备及存储介质,包括如下步骤:获取预设置的帧频值,根据所述帧频值连续顺次采集同一目标的背景图像、红外结构光图像、红外图像或连续顺次采集同一目标的红外图像、红外结构光图像、背景图像;根据所述背景图像和所述红外结构光图像的对应像素的灰度值相减生成目标结构光图像;根据所述目标结构光图像进行深度重建或三维重建生成深度图像。本发明中能够提高背景光较强情况下的被测目标深度重建结果,并能够缩短相邻两帧图像之间的采集的时间间隔,提高深度相机受攻击的难度,使得深度相机的安全性更高。

深度相机抓拍时的深度重建方法、系统、设备及介质.pdf
本发明提供了一种深度相机抓拍时的深度重建方法、系统、设备及介质,包括:获取目标人脸的RGB图像、IR图像以及红外光斑图像;对RGB图像、IR图像进行人脸检测,同时对红外光斑图像进行预处理,以提取红外光斑图像中的多个光斑点区域;当在RGB图像、IR图像检测出人脸区域时,对人脸区域进行表情检测,确定该人脸区域的表情类型;当表情类型为预设置的表情类型集合中的任一表情类型时,根据红外光斑图像的多个光斑点区域和RGB图像中的人脸区域对目标人脸进行深度重建生成深度人脸图像。本发明中在人脸检测时对红外光斑图像进行预处理