
深度重建方法、系统、设备及存储介质.pdf

一只****呀9


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
深度重建方法、系统、设备及存储介质.pdf
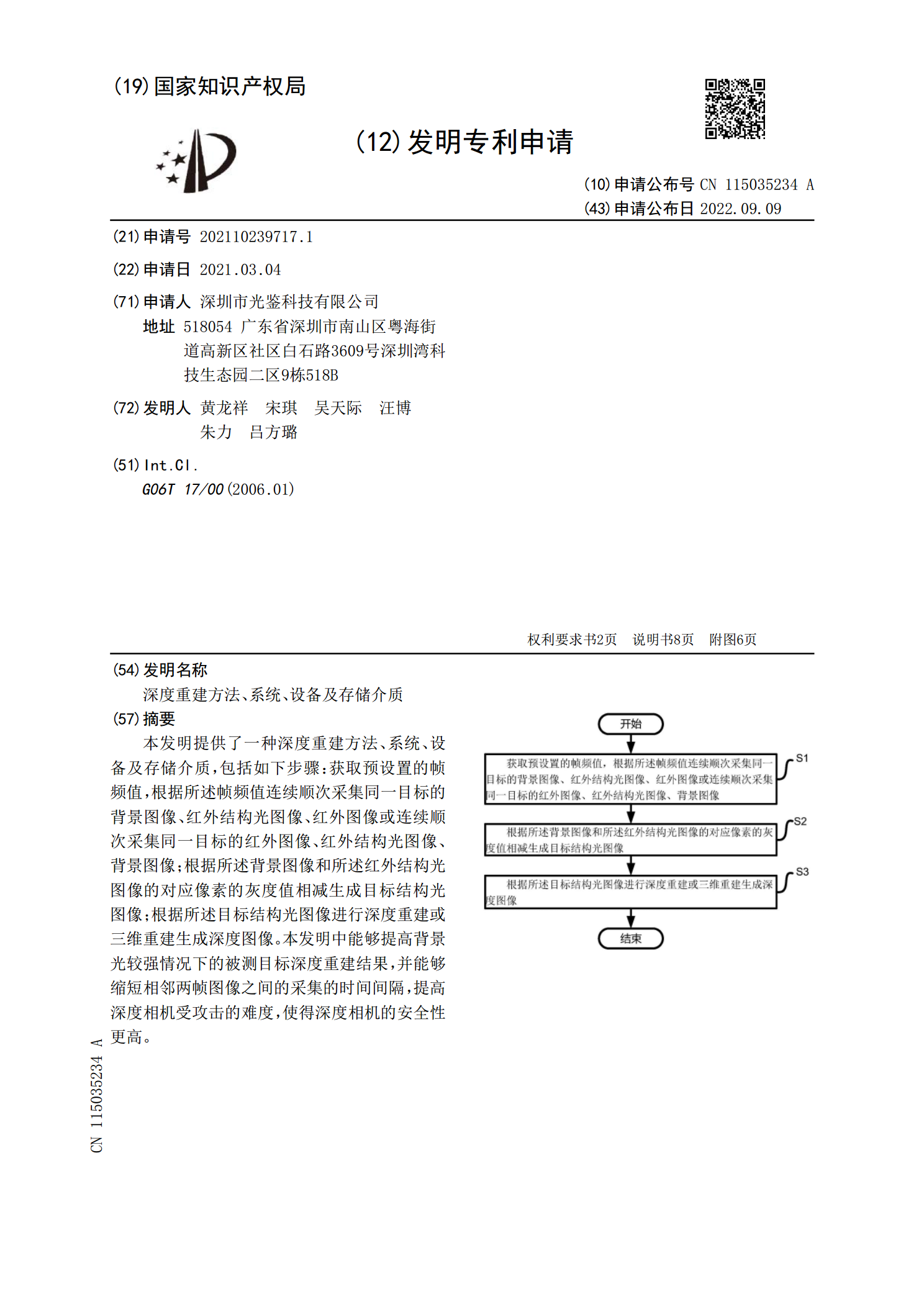
本发明提供了一种深度重建方法、系统、设备及存储介质,包括如下步骤:获取预设置的帧频值,根据所述帧频值连续顺次采集同一目标的背景图像、红外结构光图像、红外图像或连续顺次采集同一目标的红外图像、红外结构光图像、背景图像;根据所述背景图像和所述红外结构光图像的对应像素的灰度值相减生成目标结构光图像;根据所述目标结构光图像进行深度重建或三维重建生成深度图像。本发明中能够提高背景光较强情况下的被测目标深度重建结果,并能够缩短相邻两帧图像之间的采集的时间间隔,提高深度相机受攻击的难度,使得深度相机的安全性更高。

深度相机抓拍时的深度重建方法、系统、设备及介质.pdf
本发明提供了一种深度相机抓拍时的深度重建方法、系统、设备及介质,包括:获取目标人脸的RGB图像、IR图像以及红外光斑图像;对RGB图像、IR图像进行人脸检测,同时对红外光斑图像进行预处理,以提取红外光斑图像中的多个光斑点区域;当在RGB图像、IR图像检测出人脸区域时,对人脸区域进行表情检测,确定该人脸区域的表情类型;当表情类型为预设置的表情类型集合中的任一表情类型时,根据红外光斑图像的多个光斑点区域和RGB图像中的人脸区域对目标人脸进行深度重建生成深度人脸图像。本发明中在人脸检测时对红外光斑图像进行预处理
数据重建方法及装置、数据存储系统、存储介质.pdf
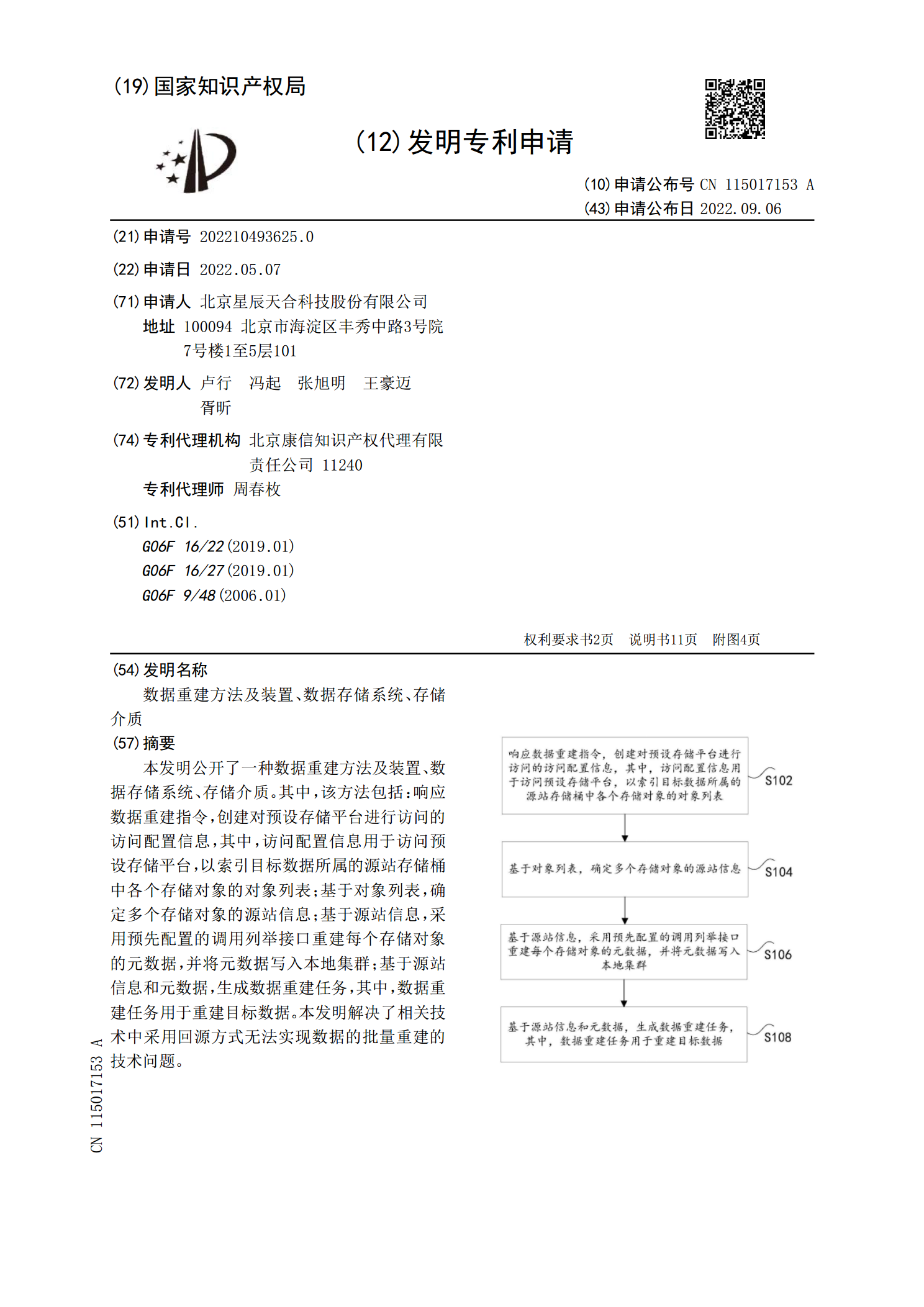
本发明公开了一种数据重建方法及装置、数据存储系统、存储介质。其中,该方法包括:响应数据重建指令,创建对预设存储平台进行访问的访问配置信息,其中,访问配置信息用于访问预设存储平台,以索引目标数据所属的源站存储桶中各个存储对象的对象列表;基于对象列表,确定多个存储对象的源站信息;基于源站信息,采用预先配置的调用列举接口重建每个存储对象的元数据,并将元数据写入本地集群;基于源站信息和元数据,生成数据重建任务,其中,数据重建任务用于重建目标数据。本发明解决了相关技术中采用回源方式无法实现数据的批量重建的技术问题。

正则化图像重建方法、系统、可读存储介质和设备.pdf
本申请涉及一种正则化图像重建方法、系统、可读存储介质和设备,属于医疗影像技术领域,获取医学扫描的原始数据,根据原始数据进行图像重建,得到中间图像;对中间图像进行信号特征提取,获得信号特征;根据中间图像获取基图像;根据信号特征和基图像获取正则化图像。在具体实现过程中,通过对原始数据的重建处理得到中间图像,有效保留了图像中的关键有效信息,通过提取信号特征和获取基图像两种方式,对中间图像进行拆分处理,信号特征和基图像的结合构成正则化约束的重建图像,降低了图像重建过程中对神经网络算法的依赖性,同时还能重建得到准确
视频重建方法、系统、设备及计算机可读存储介质.pdf
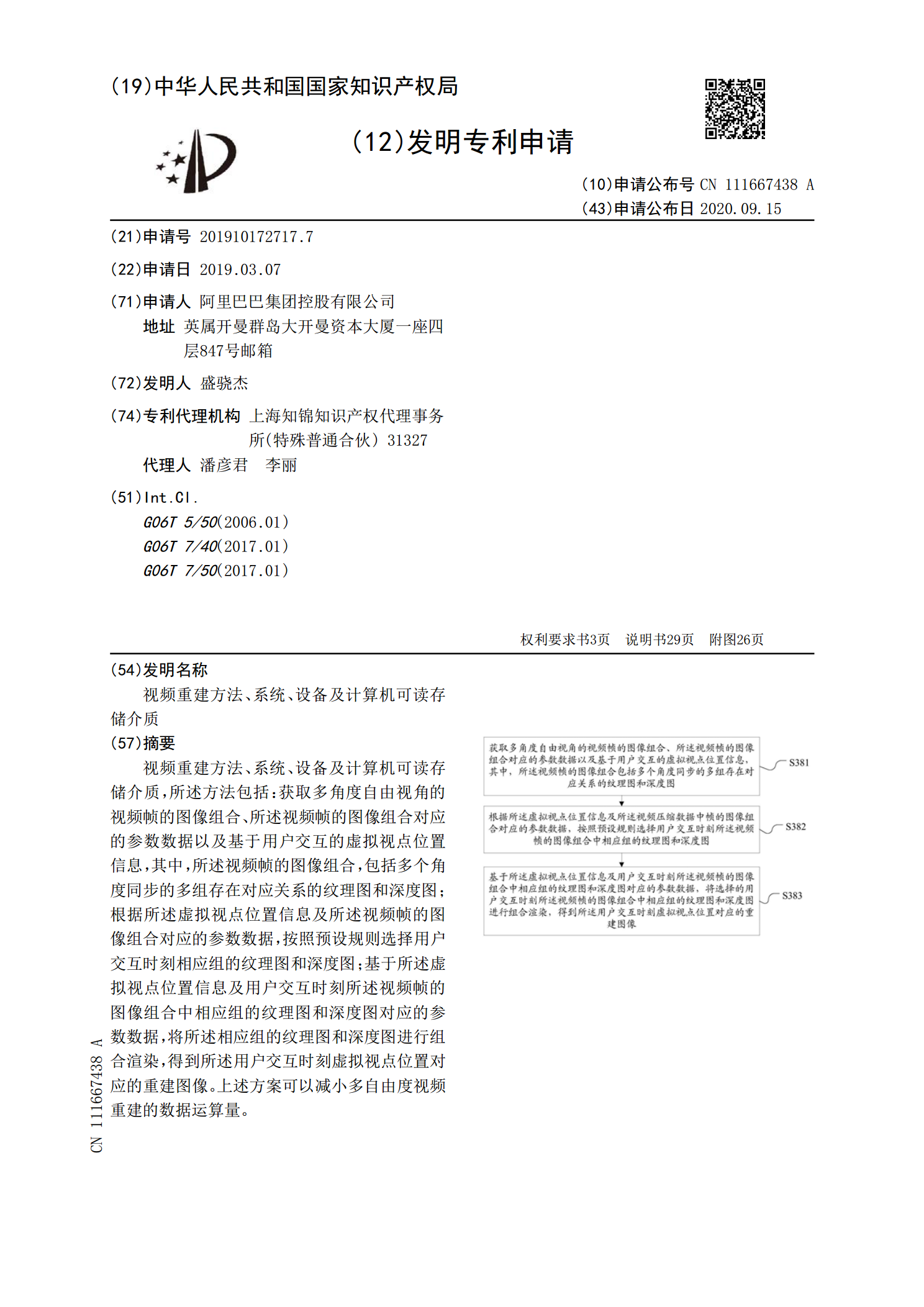
视频重建方法、系统、设备及计算机可读存储介质,所述方法包括:获取多角度自由视角的视频帧的图像组合、所述视频帧的图像组合对应的参数数据以及基于用户交互的虚拟视点位置信息,其中,所述视频帧的图像组合,包括多个角度同步的多组存在对应关系的纹理图和深度图;根据所述虚拟视点位置信息及所述视频帧的图像组合对应的参数数据,按照预设规则选择用户交互时刻相应组的纹理图和深度图;基于所述虚拟视点位置信息及用户交互时刻所述视频帧的图像组合中相应组的纹理图和深度图对应的参数数据,将所述相应组的纹理图和深度图进行组合渲染,得到所述