
用于检测拖车角度的系统和方法.pdf

文阁****23

1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于检测拖车角度的系统和方法.pdf
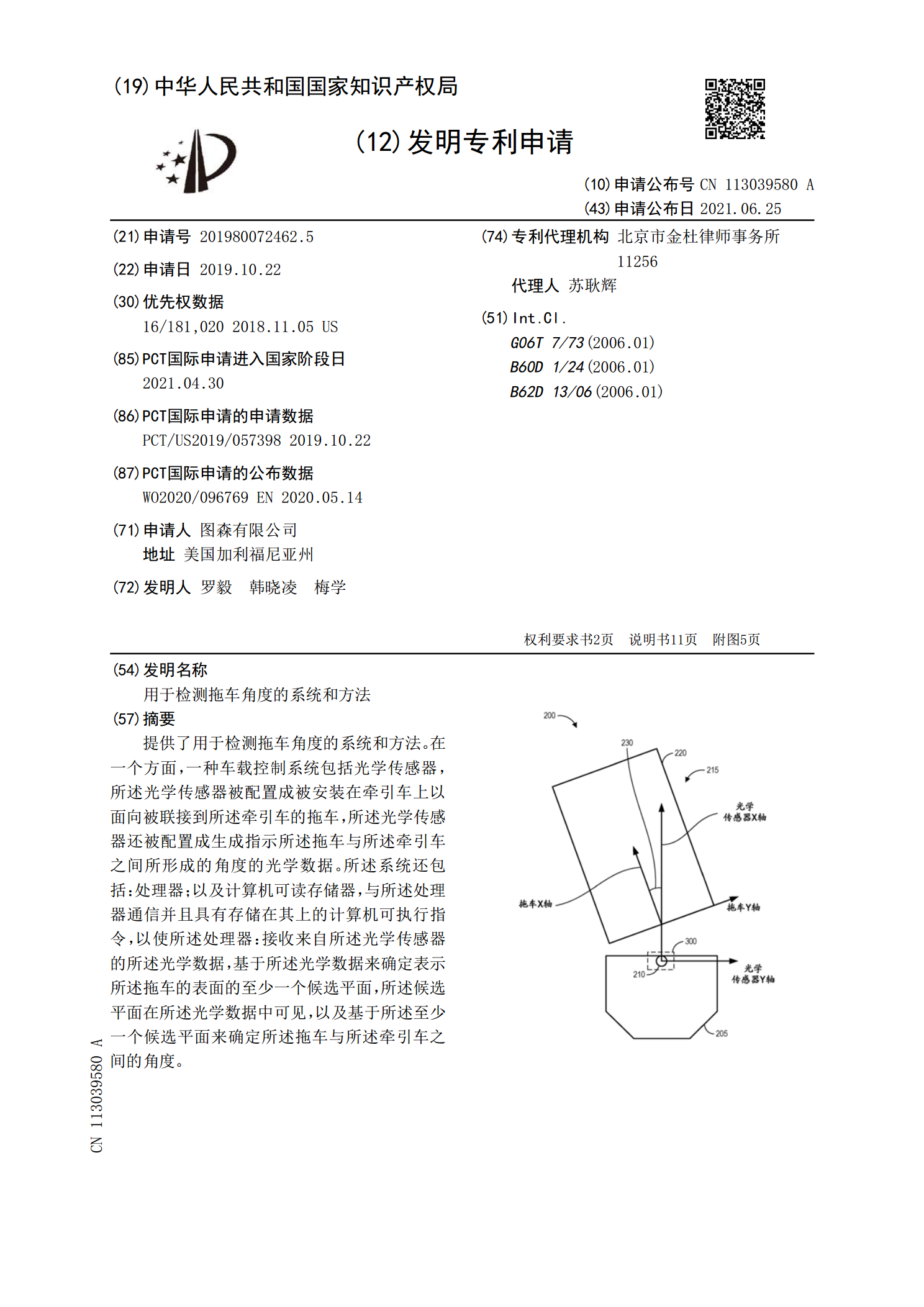
提供了用于检测拖车角度的系统和方法。在一个方面,一种车载控制系统包括光学传感器,所述光学传感器被配置成被安装在牵引车上以面向被联接到所述牵引车的拖车,所述光学传感器还被配置成生成指示所述拖车与所述牵引车之间所形成的角度的光学数据。所述系统还包括:处理器;以及计算机可读存储器,与所述处理器通信并且具有存储在其上的计算机可执行指令,以使所述处理器:接收来自所述光学传感器的所述光学数据,基于所述光学数据来确定表示所述拖车的表面的至少一个候选平面,所述候选平面在所述光学数据中可见,以及基于所述至少一个候选平面来确
计算车辆拖车角度的方法和系统.pdf
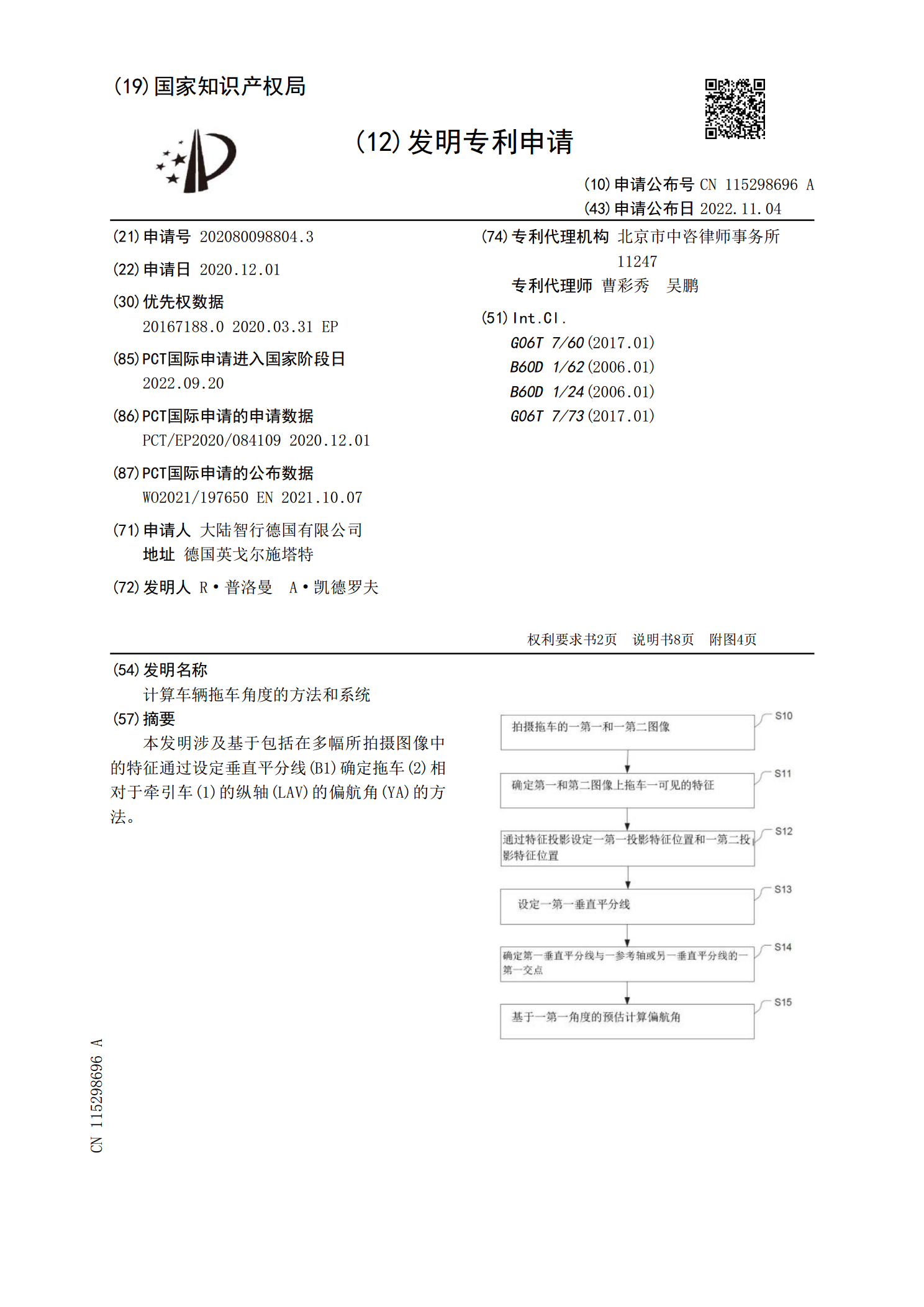
本发明涉及一种在使用校正信息情况下,基于包含在多幅所拍摄图像中的至少一个特征(F1、F2),确定拖车(2)相对于牵引车(1)纵轴(LAV)的偏航角(YA)的方法。

用于拖车属性的自动检测的系统和方法.pdf
本公开提供“用于拖车属性的自动检测的系统和方法”。公开了用于拖车属性自动检测的方法和设备。示例车辆包括车辆间通信模块和信息娱乐主机单元。信息娱乐主机单元被配置为检测附接拖车的存在。信息娱乐主机单元还被配置为:响应于确定所附接拖车是未识别拖车;经由车辆间通信模块广播对图像的请求;对图像执行语义分割;使用分割的图像生成三维点云;并且基于三维点云估计附接拖车的属性。
用于调平拖车的系统和方法.pdf
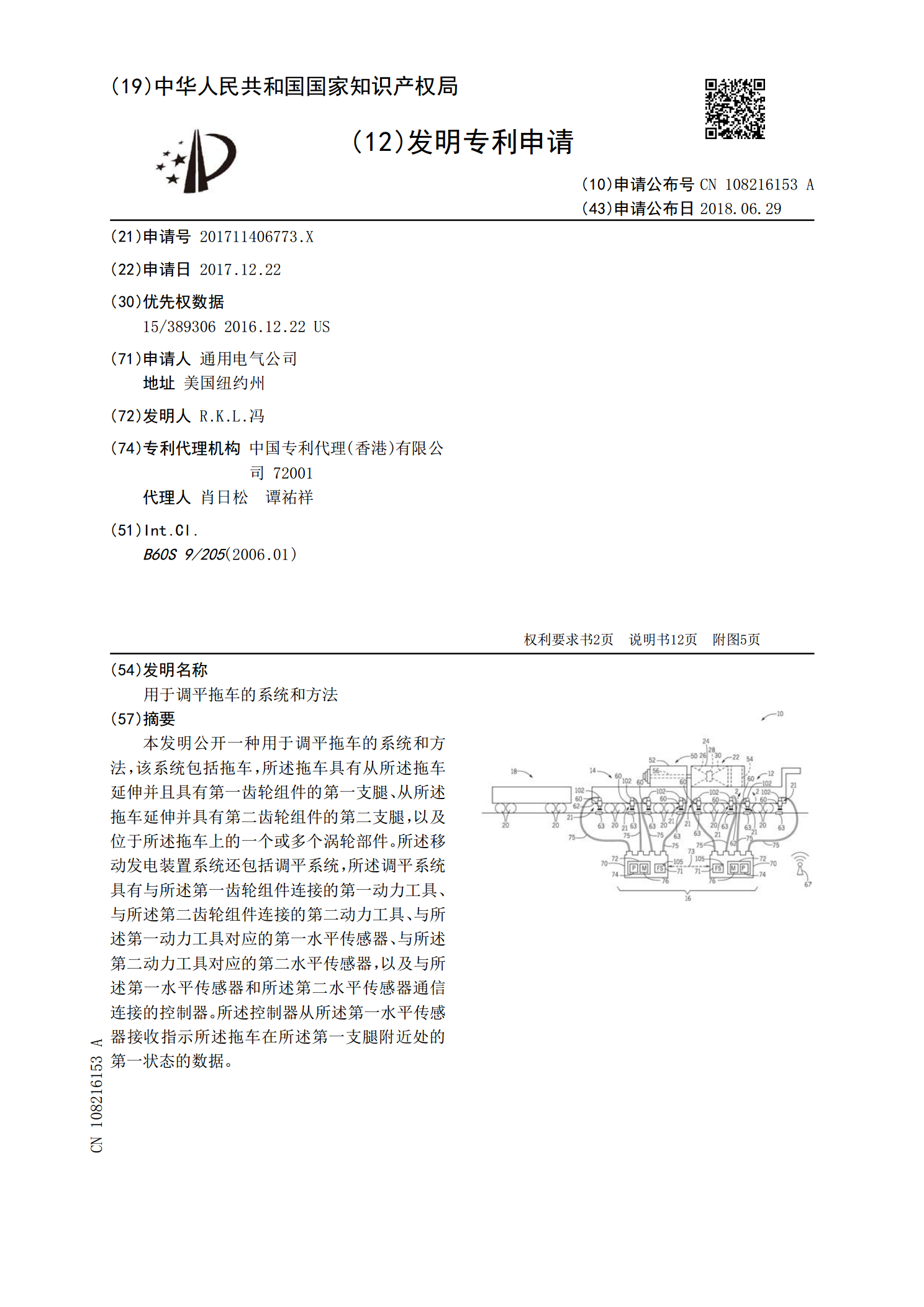
本发明公开一种用于调平拖车的系统和方法,该系统包括拖车,所述拖车具有从所述拖车延伸并且具有第一齿轮组件的第一支腿、从所述拖车延伸并具有第二齿轮组件的第二支腿,以及位于所述拖车上的一个或多个涡轮部件。所述移动发电装置系统还包括调平系统,所述调平系统具有与所述第一齿轮组件连接的第一动力工具、与所述第二齿轮组件连接的第二动力工具、与所述第一动力工具对应的第一水平传感器、与所述第二动力工具对应的第二水平传感器,以及与所述第一水平传感器和所述第二水平传感器通信连接的控制器。所述控制器从所述第一水平传感器接收指示所述

用于控制拖车脚轮方向的拖车控制系统和方法.pdf
本发明公开了用于控制拖车脚轮方向的拖车控制系统和方法,允许靠近壁操作拖车而脚轮不会卡住。拖车控制系统包括:拖车,其具有一个或多个旋转脚轮;壁;引导表面,其毗邻所述壁,被构造成当所述旋转脚轮在基本上平行于所述壁的方向上横向经过所述引导表面时将至少一个所述旋转脚轮向外旋转以被向着所述壁引导。当脚轮被向着壁引导时,所述脚轮的地板接触比脚轮的旋转轴更远离壁并且总体在拖车下方。当将方向反向时,脚轮向外旋转,使地板接触保持更远离壁并且总体在拖车下方。因此,脚轮不会旋转进入壁并且卡住拖车。