
一种基于自适应阈值算法的ORB图像特征提取方法.pdf

邻家****文章


1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于自适应阈值算法的ORB图像特征提取方法.pdf
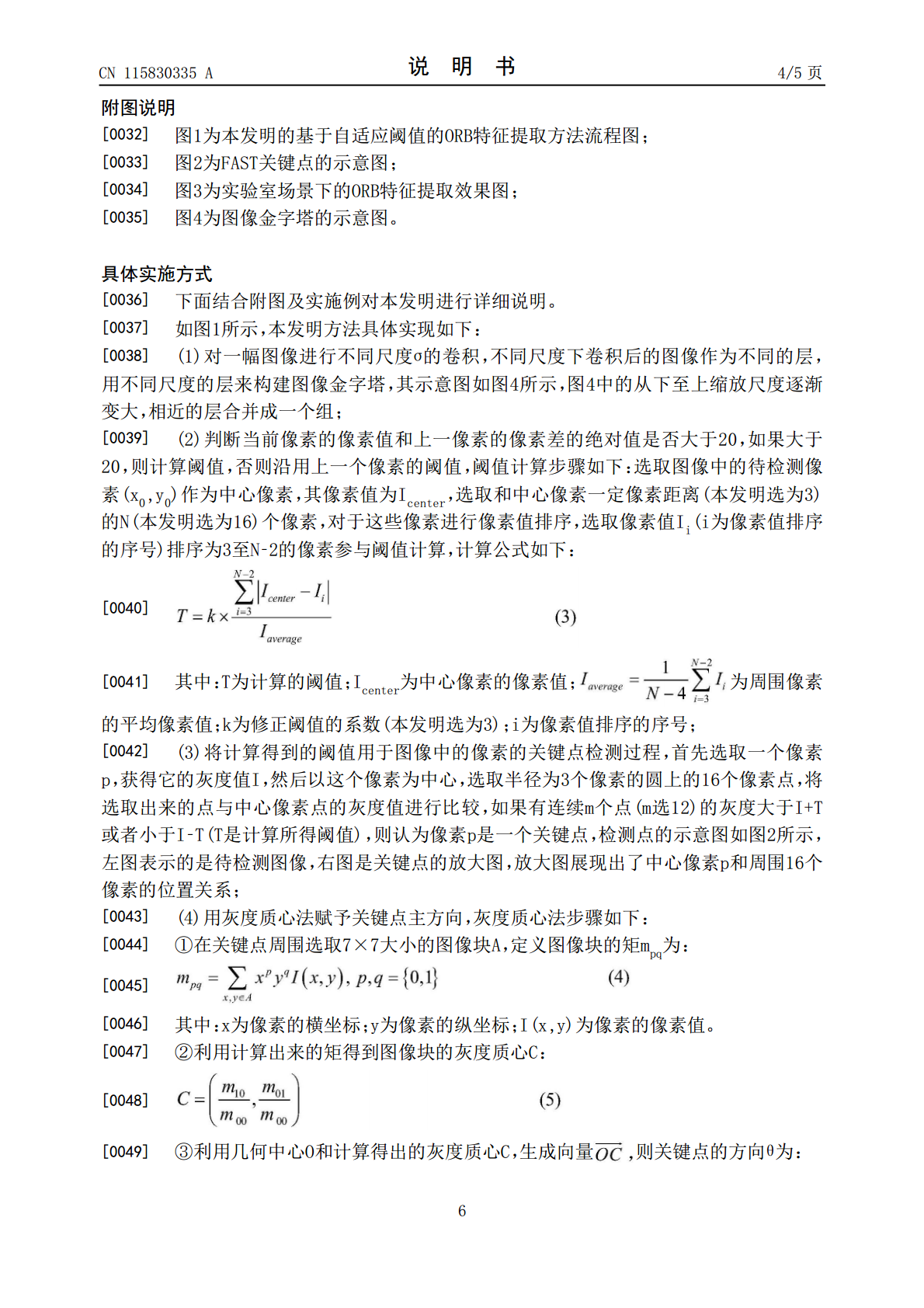
本发明涉及一种基于自适应阈值算法的ORB图像特征提取方法,构建具有8层图像的金字塔;在每一层图像中进行阈值的计算;对于图像中的每个像素,在判断其是否为关键点之前,均进行阈值计算,如果差异较大,则对当前像素进行阈值计算,否则,就沿用上一个像素的阈值;将得到的阈值用于FAST关键点检测中,最终检测出图像中关键点的位置;在检测出的关键点的位置周围选取像素区域,利用灰度质心法计算像素区域的质心位置和特征主方向,确定BRIEF点对的坐标系,并用BRIEF描述子描述FAST关键点,得到图像有向的FAST关键点和ORB
一种基于自适应快速迭代收缩阈值算法的图像处理方法.pdf
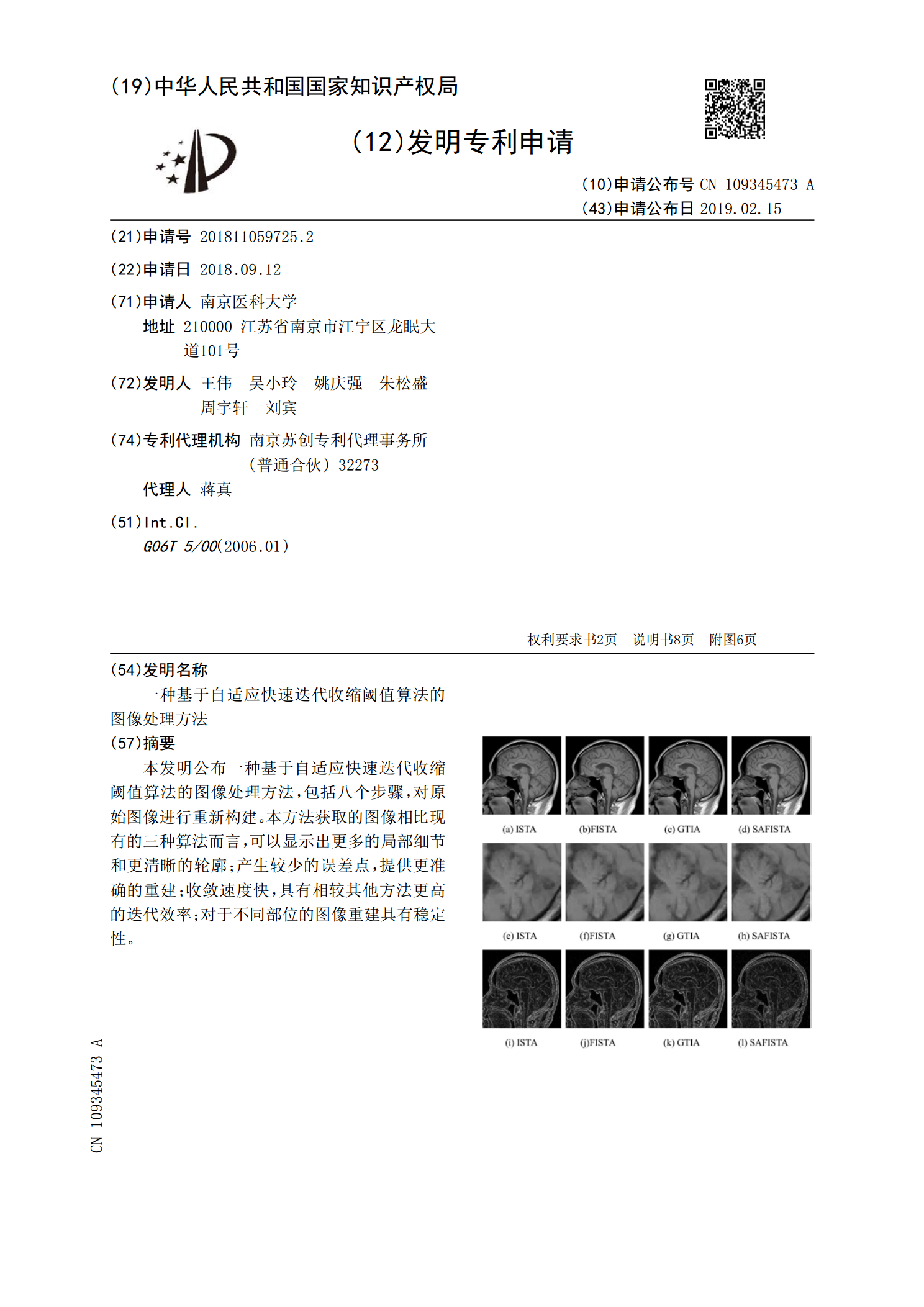
本发明公布一种基于自适应快速迭代收缩阈值算法的图像处理方法,包括八个步骤,对原始图像进行重新构建。本方法获取的图像相比现有的三种算法而言,可以显示出更多的局部细节和更清晰的轮廓;产生较少的误差点,提供更准确的重建;收敛速度快,具有相较其他方法更高的迭代效率;对于不同部位的图像重建具有稳定性。

一种基于自适应阈值Canny算法的输变电设备图像检测方法研究.docx
一种基于自适应阈值Canny算法的输变电设备图像检测方法研究一种基于自适应阈值Canny算法的输变电设备图像检测方法研究摘要:随着电力系统的快速发展,输变电设备的安全性和稳定性越来越受到重视。因此,开发一种快速高效的输变电设备图像检测方法具有重要意义。本文提出了一种基于自适应阈值Canny算法的图像检测方法,通过对输变电设备图像进行边缘检测和目标识别,实现对输变电设备的自动检测和识别。关键词:输变电设备;图像检测;自适应阈值Canny算法;边缘检测;目标识别1.引言输变电设备是电力系统中的关键组成部分,其

基于改进的ORB算法的图像匹配算法.pdf
本发明公开了一种基于改进的ORB算法的图像匹配算法,本方法通过AGAST算法对目标图像和对比图像产生一组搜索树,执行后向归纳算法得到平面区域决策树和复杂区域决策树;通过比对决策树内像素点特征得到特征点;确定特征点主方向并使主方向旋转到0度;采用BRIEF算法对特征点构建特征向量;采用多探针局部敏感哈希算法将特征向量映射到不同的哈希桶中,并按探测序列比对不同哈希桶中的特征向量,得到初始匹配对;调用RANSAC算法函数对初始匹配对进行误匹配剔除,得到精准的图像匹配结果。本算法通过对特征点提取和匹配,得到粗略匹
一种基于自适应阈值BIHT算法的DOA估计方法.pdf
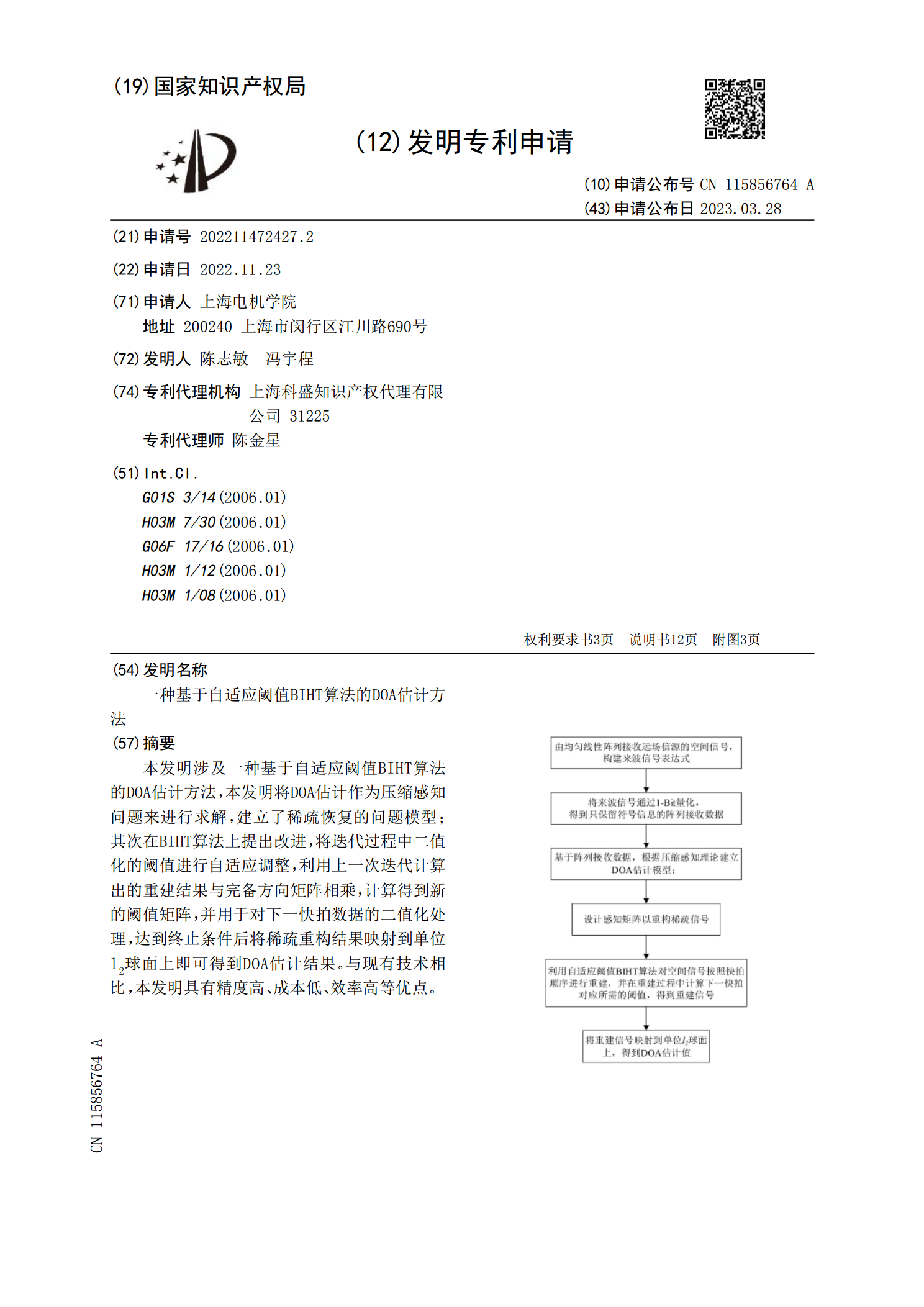
本发明涉及一种基于自适应阈值BIHT算法的DOA估计方法,本发明将DOA估计作为压缩感知问题来进行求解,建立了稀疏恢复的问题模型;其次在BIHT算法上提出改进,将迭代过程中二值化的阈值进行自适应调整,利用上一次迭代计算出的重建结果与完备方向矩阵相乘,计算得到新的阈值矩阵,并用于对下一快拍数据的二值化处理,达到终止条件后将稀疏重构结果映射到单位l<base:Sub>2</base:Sub>球面上即可得到DOA估计结果。与现有技术相比,本发明具有精度高、成本低、效率高等优点。