
基于改进的ORB算法的图像匹配算法.pdf

增梅****主啊


1/9

2/9

3/9

4/9
5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于改进的ORB算法的图像匹配算法.pdf
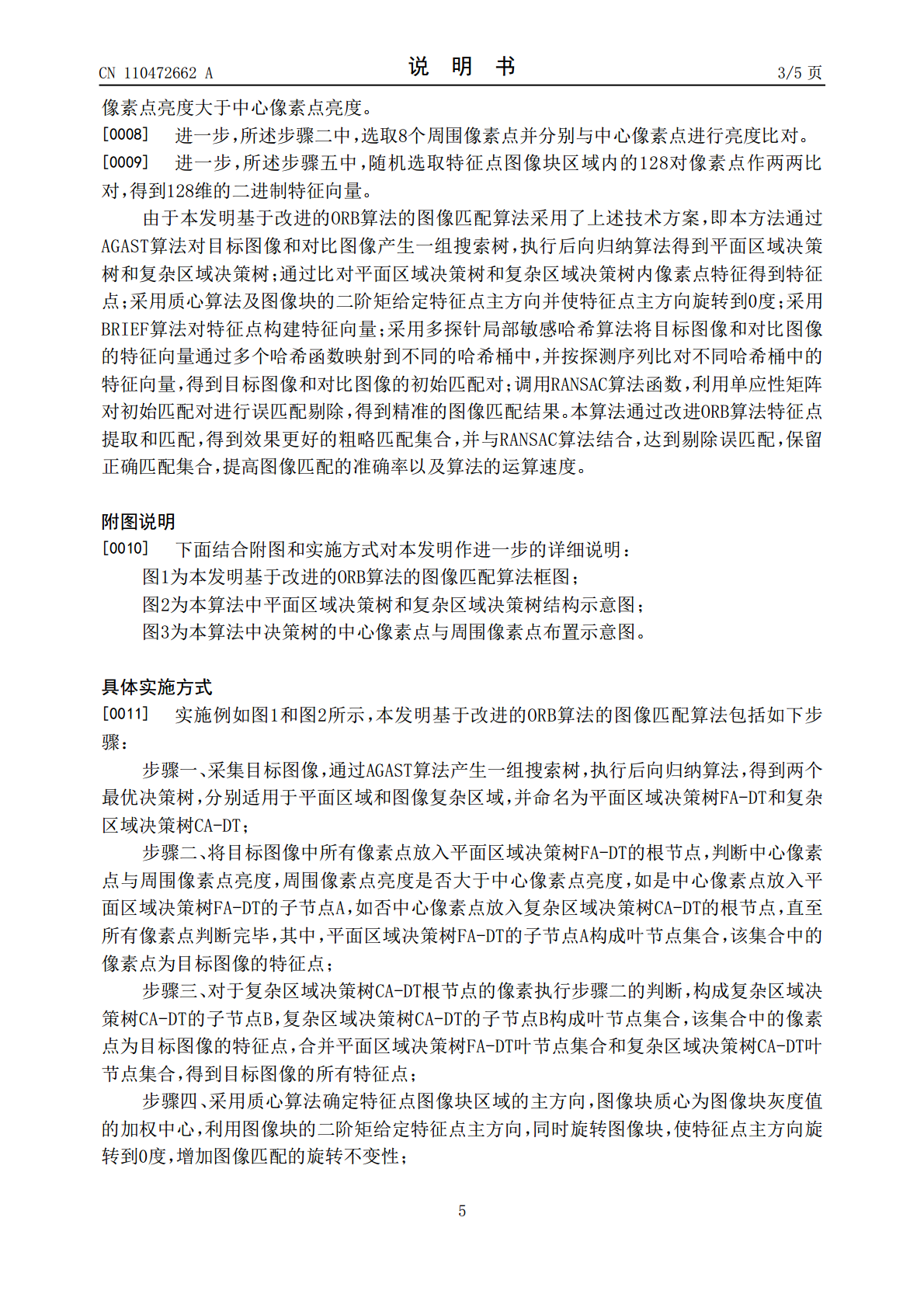
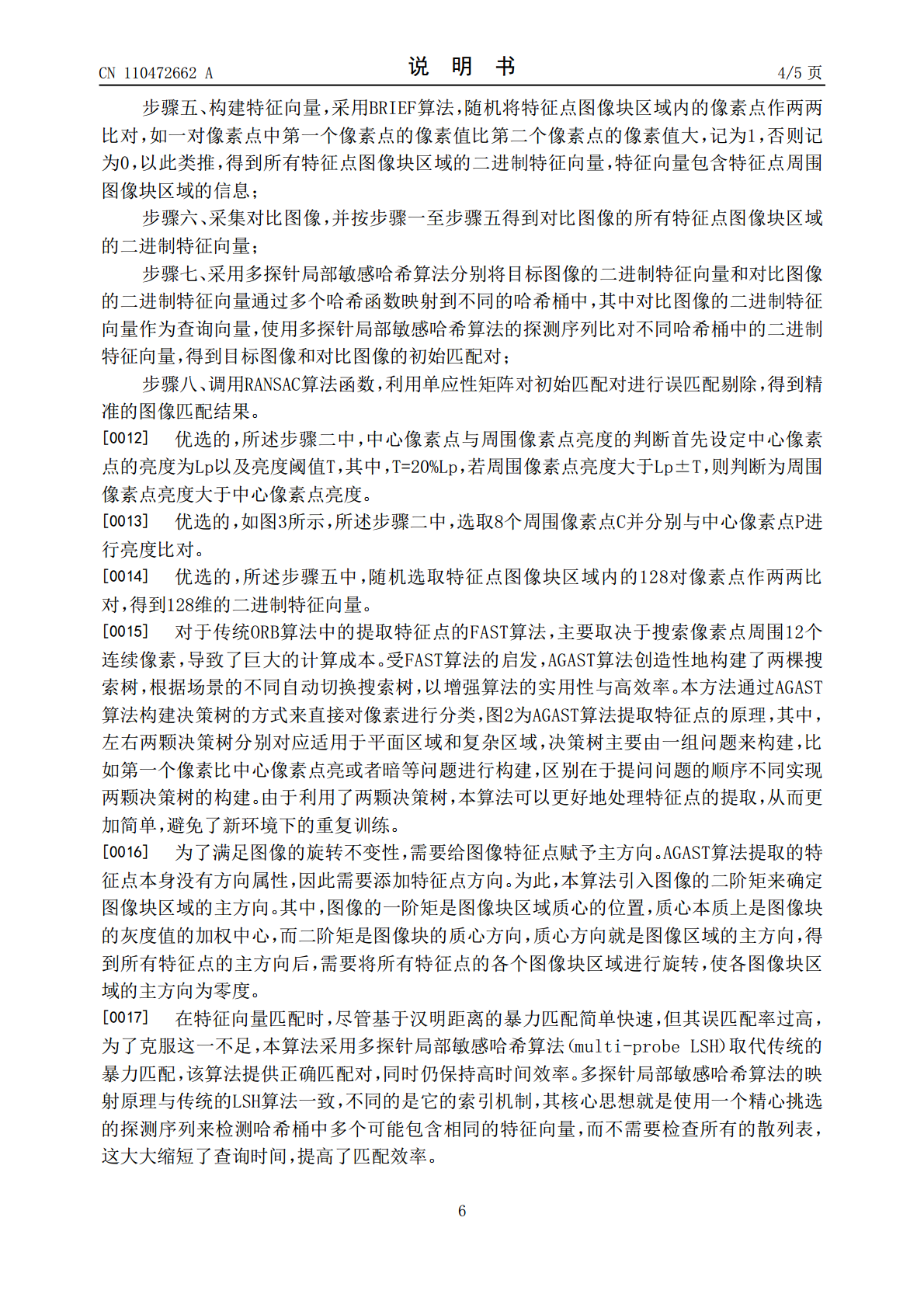
本发明公开了一种基于改进的ORB算法的图像匹配算法,本方法通过AGAST算法对目标图像和对比图像产生一组搜索树,执行后向归纳算法得到平面区域决策树和复杂区域决策树;通过比对决策树内像素点特征得到特征点;确定特征点主方向并使主方向旋转到0度;采用BRIEF算法对特征点构建特征向量;采用多探针局部敏感哈希算法将特征向量映射到不同的哈希桶中,并按探测序列比对不同哈希桶中的特征向量,得到初始匹配对;调用RANSAC算法函数对初始匹配对进行误匹配剔除,得到精准的图像匹配结果。本算法通过对特征点提取和匹配,得到粗略匹

基于改进ORB的图像匹配算法优化.pptx
,目录PartOnePartTwoORB算法原理ORB算法优缺点改进ORB算法的必要性PartThree特征点检测算法优化特征点描述符优化特征点匹配算法优化图像配准技术优化PartFour预处理阶段特征点检测阶段特征点描述阶段特征点匹配阶段图像配准阶段PartFive实验数据集与实验环境实验结果展示实验结果分析与其他算法的比较分析PartSix应用领域与场景潜在的挑战与问题未来研究方向与展望THANKS
基于改进ORB和AKAZE的图像匹配算法.pptx
汇报人:CONTENTSPARTONEPARTTWOORB和AKAZE算法简介ORB和AKAZE算法原理ORB和AKAZE算法优缺点PARTTHREE改进ORB算法简介改进ORB算法原理改进ORB算法实现过程改进ORB算法优缺点PARTFOUR改进AKAZE算法简介改进AKAZE算法原理改进AKAZE算法实现过程改进AKAZE算法优缺点PARTFIVE算法原理及实现过程实验结果及分析与其他图像匹配算法的比较算法应用场景及优势PARTSIX基于改进ORB和AKAZE的图像匹配算法总结未来研究方向与展望汇报人

基于改进ORB算法的VSLAM特征匹配算法研究.docx
基于改进ORB算法的VSLAM特征匹配算法研究基于改进ORB算法的VSLAM特征匹配算法研究摘要:视觉同时定位与地图构建(VSLAM)是近年来在机器人和无人驾驶等领域中备受关注的研究方向之一。ORB(OrientedFASTandRotatedBRIEF)算法是一种常用的SLAM特征点提取和描述算法,但在一些复杂场景中,ORB算法的特征点容易失配。本文针对这个问题,提出了一种改进ORB算法的VSLAM特征匹配算法,通过引入一种基于尺度一致性的特征点筛选方法,实现了更加准确和鲁棒的特征匹配。实验结果表明,该

基于改进ORB算法的图像特征点提取与匹配方法.docx
基于改进ORB算法的图像特征点提取与匹配方法摘要:本文提出了一种图像特征点提取与匹配方法,该方法基于改进的ORB算法。ORB算法是一个经典的图像特征点提取算法,具有高效和准确性的特点。但在实际应用中,ORB算法也存在一些问题,如提取精度不高、对于非旋转对称的图像难以提取特征等。本文从角度和尺度两个方面对ORB进行了改进,使其在提取特征点时具有更高的准确性和稳定性。同时,本文还提出了基于改进ORB算法的图像匹配方法,该方法可以通过匹配特征点实现相似图像的匹配。实验结果表明,本文提出的方法可以提高ORB算法在