
基于伪线性最大相关熵卡尔曼滤波的仅测角目标追踪方法.pdf

书生****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于伪线性最大相关熵卡尔曼滤波的仅测角目标追踪方法.pdf
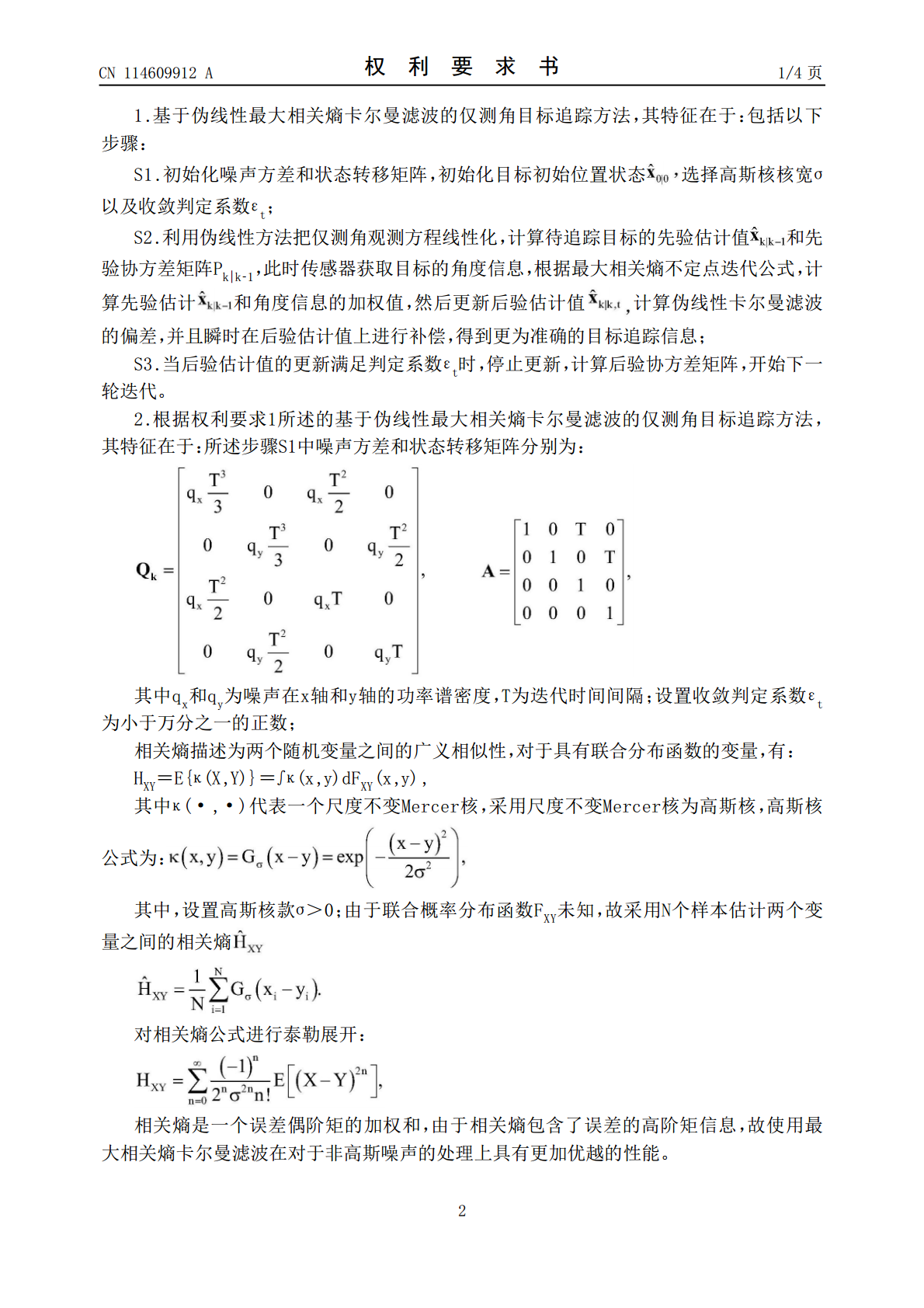
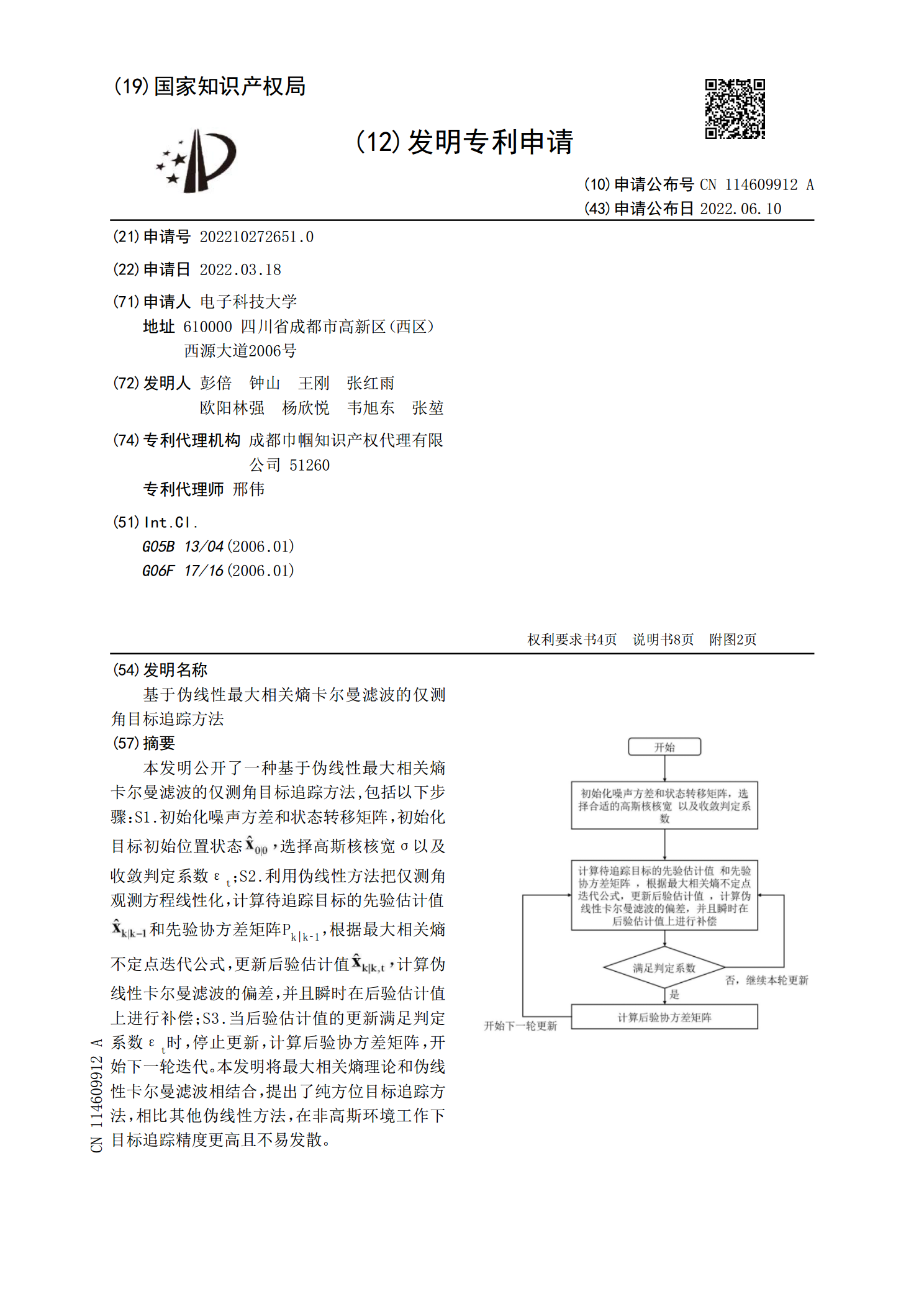
本发明公开了一种基于伪线性最大相关熵卡尔曼滤波的仅测角目标追踪方法,包括以下步骤:S1.初始化噪声方差和状态转移矩阵,初始化目标初始位置状态<base:Imagehe=@71@wi=@98@file=@DDA0003554316970000011.JPG@imgContent=@drawing@imgFormat=@JPEG@orientation=@portrait@inline=@yes@/>选择高斯核核宽σ以及收敛判定系数ε<base:Sub>t</base:Sub>;S2.利用伪线性方法把仅测角观

一种基于最大协同熵卡尔曼滤波方法.pdf
本发明实施例公开了一种基于最大协同熵卡尔曼滤波方法,对脉冲式非高斯噪声具有很强的鲁棒性,并保持了传统卡尔曼滤波算法的状态均值传播过程,而且保留了预测误差协方差的矩阵的传播过程。因此,这种新的滤波器也具有递归结构,适用于在线更新。

基于最大熵卡尔曼滤波算法的液压支架调直方法.docx
基于最大熵卡尔曼滤波算法的液压支架调直方法基于最大熵卡尔曼滤波算法的液压支架调直方法摘要:液压支架是工业生产领域中常用的一种支撑装置,调整其直度是保证生产质量的关键环节。本文提出了一种基于最大熵卡尔曼滤波算法的液压支架调直方法。首先,介绍了液压支架的工作原理和调整直度的重要性。然后,详细介绍了最大熵卡尔曼滤波算法的原理和应用。接下来,提出了基于最大熵卡尔曼滤波算法的液压支架调直方法,并对其进行了仿真实验验证。结果表明,该方法能够有效地调整液压支架的直度,提高生产效率和产品质量。关键词:液压支架;调直;最大

基于扩展卡尔曼滤波的目标追踪算法.pptx
汇报人:目录PARTONEPARTTWO算法原理算法特点算法应用场景算法优缺点PARTTHREE目标追踪算法定义目标追踪算法分类目标追踪算法的应用场景目标追踪算法的优缺点PARTFOUR算法原理算法实现过程算法实验结果算法优缺点PARTFIVE算法精度提升算法实时性优化算法鲁棒性增强算法与其他技术的融合PARTSIX在智能监控领域的应用前景在无人驾驶领域的应用前景在机器人领域的应用前景在其他领域的应用前景THANKYOU

基于集合卡尔曼滤波的非线性目标跟踪算法.docx
基于集合卡尔曼滤波的非线性目标跟踪算法基于集合卡尔曼滤波的非线性目标跟踪算法摘要:非线性目标跟踪是计算机视觉和机器人领域的重要任务,具有很高的应用价值。在本文中,我们提出了一种基于集合卡尔曼滤波的非线性目标跟踪算法。该算法利用集合卡尔曼滤波器对目标进行跟踪,并通过融合感知数据和运动模型来估计目标的位置和速度。实验结果表明,该算法在不同场景下都能够实现准确和稳定的目标跟踪。关键词:非线性目标跟踪,集合卡尔曼滤波,感知数据,运动模型引言:目标跟踪是计算机视觉和机器人领域的一个重要任务,广泛应用于智能监控、自动