
一种基于最大协同熵卡尔曼滤波方法.pdf

运升****魔王

1/9
2/9
3/9
4/9
5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于最大协同熵卡尔曼滤波方法.pdf
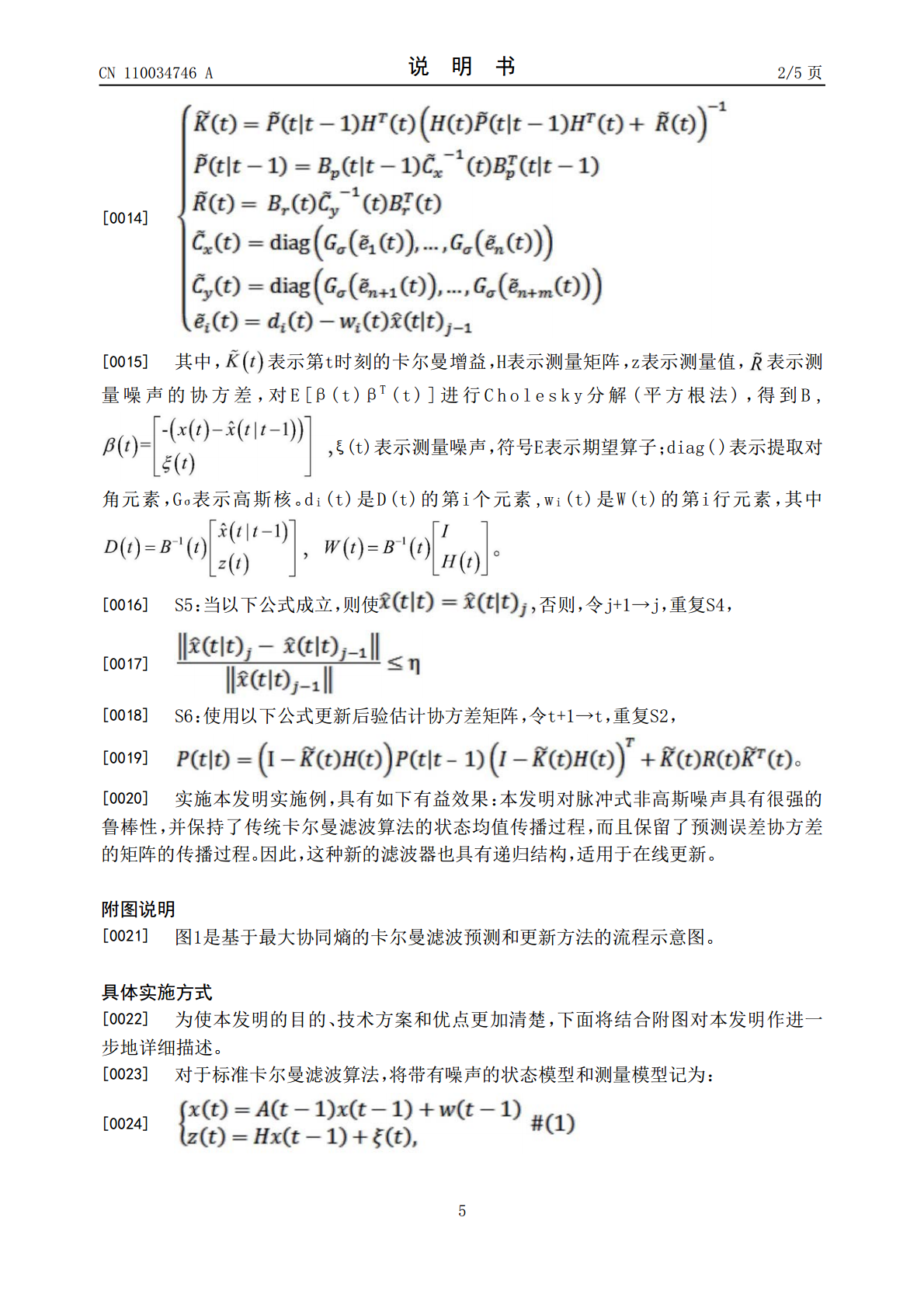
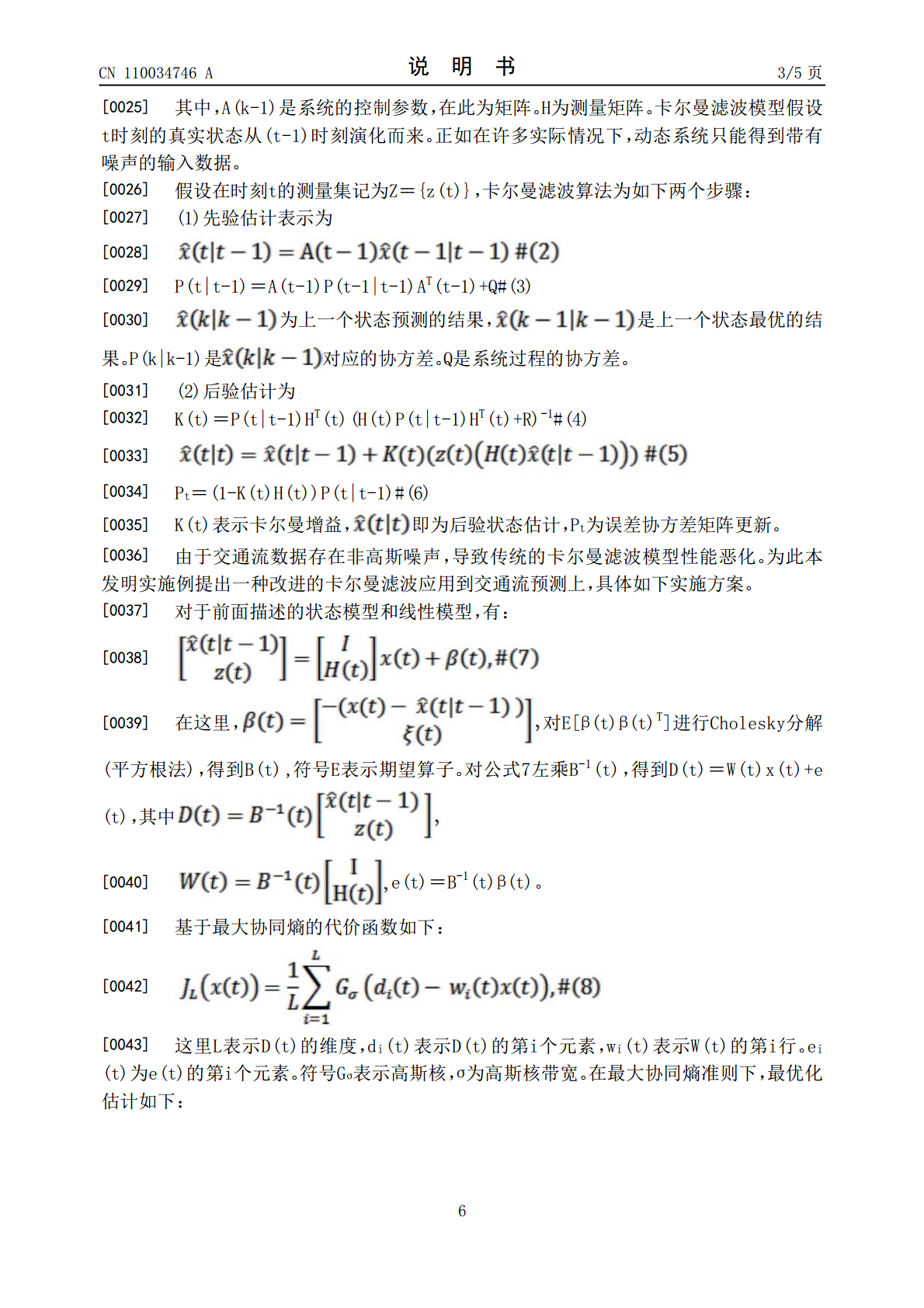
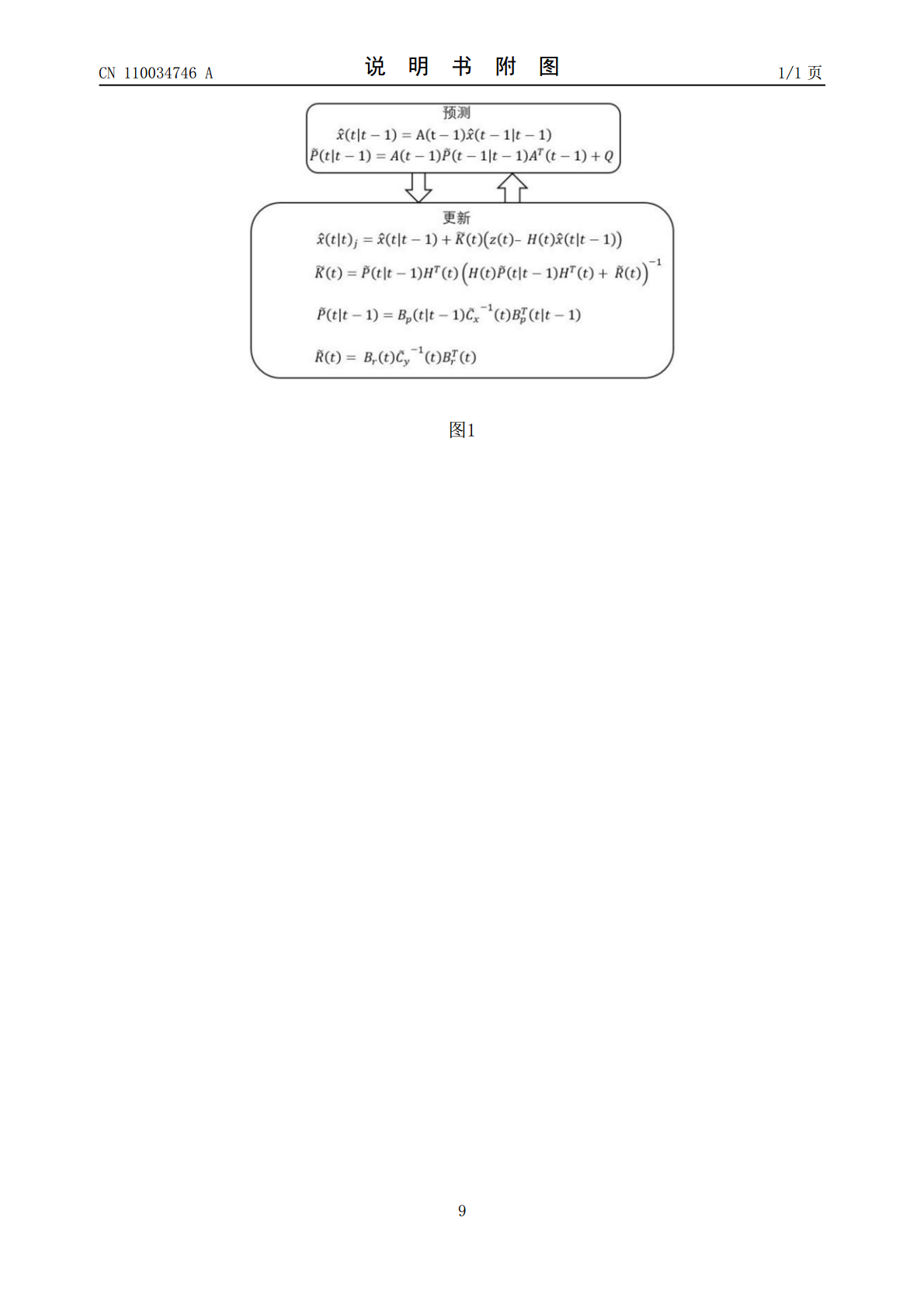
本发明实施例公开了一种基于最大协同熵卡尔曼滤波方法,对脉冲式非高斯噪声具有很强的鲁棒性,并保持了传统卡尔曼滤波算法的状态均值传播过程,而且保留了预测误差协方差的矩阵的传播过程。因此,这种新的滤波器也具有递归结构,适用于在线更新。

基于最大熵卡尔曼滤波算法的液压支架调直方法.docx
基于最大熵卡尔曼滤波算法的液压支架调直方法基于最大熵卡尔曼滤波算法的液压支架调直方法摘要:液压支架是工业生产领域中常用的一种支撑装置,调整其直度是保证生产质量的关键环节。本文提出了一种基于最大熵卡尔曼滤波算法的液压支架调直方法。首先,介绍了液压支架的工作原理和调整直度的重要性。然后,详细介绍了最大熵卡尔曼滤波算法的原理和应用。接下来,提出了基于最大熵卡尔曼滤波算法的液压支架调直方法,并对其进行了仿真实验验证。结果表明,该方法能够有效地调整液压支架的直度,提高生产效率和产品质量。关键词:液压支架;调直;最大
基于伪线性最大相关熵卡尔曼滤波的仅测角目标追踪方法.pdf
本发明公开了一种基于伪线性最大相关熵卡尔曼滤波的仅测角目标追踪方法,包括以下步骤:S1.初始化噪声方差和状态转移矩阵,初始化目标初始位置状态<base:Imagehe=@71@wi=@98@file=@DDA0003554316970000011.JPG@imgContent=@drawing@imgFormat=@JPEG@orientation=@portrait@inline=@yes@/>选择高斯核核宽σ以及收敛判定系数ε<base:Sub>t</base:Sub>;S2.利用伪线性方法把仅测角观
一种基于中心误差熵准则扩展卡尔曼滤波的姿态确定方法.pdf
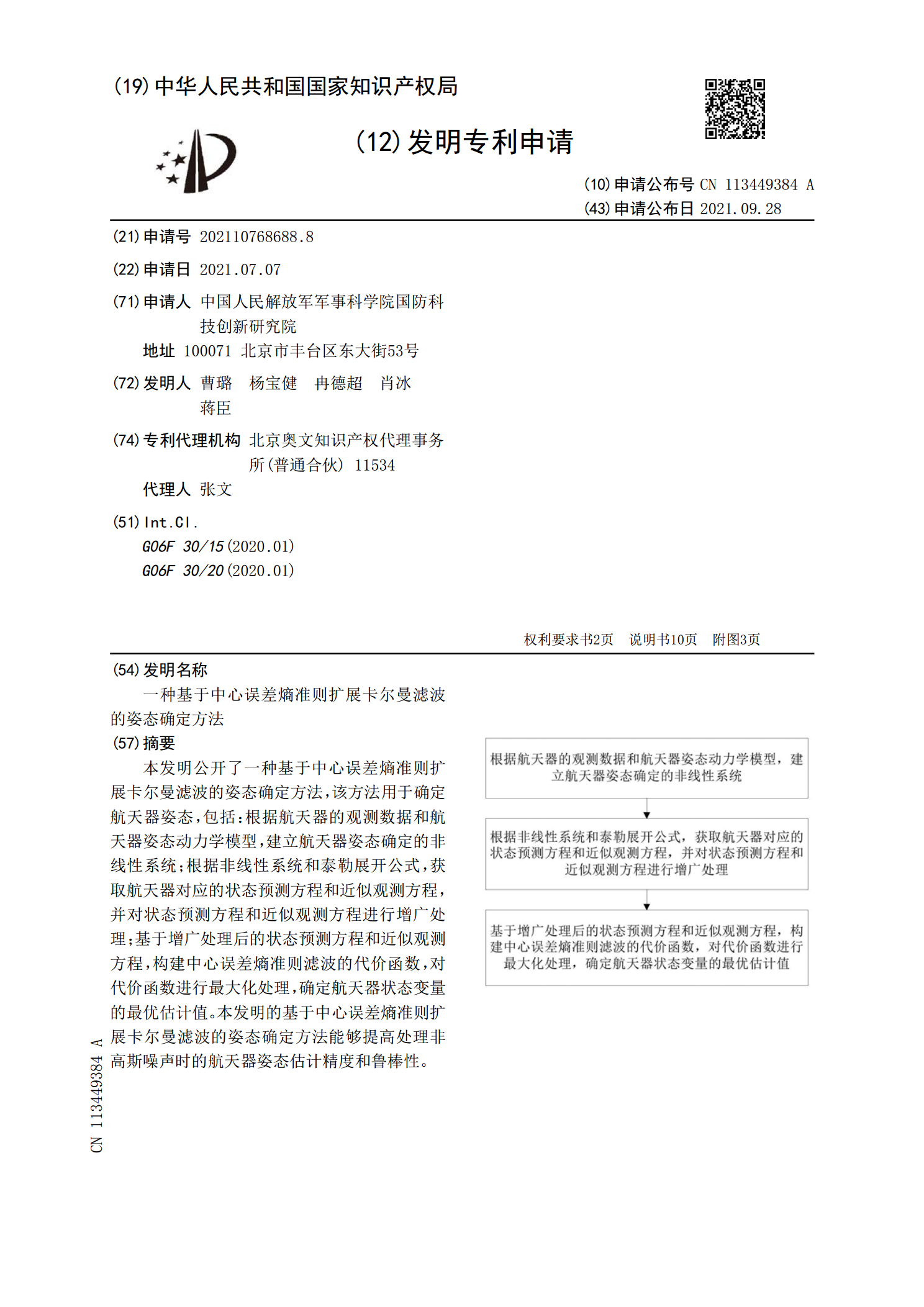
本发明公开了一种基于中心误差熵准则扩展卡尔曼滤波的姿态确定方法,该方法用于确定航天器姿态,包括:根据航天器的观测数据和航天器姿态动力学模型,建立航天器姿态确定的非线性系统;根据非线性系统和泰勒展开公式,获取航天器对应的状态预测方程和近似观测方程,并对状态预测方程和近似观测方程进行增广处理;基于增广处理后的状态预测方程和近似观测方程,构建中心误差熵准则滤波的代价函数,对代价函数进行最大化处理,确定航天器状态变量的最优估计值。本发明的基于中心误差熵准则扩展卡尔曼滤波的姿态确定方法能够提高处理非高斯噪声时的航天

一种基于卡尔曼滤波的姿态信息融合方法.docx
一种基于卡尔曼滤波的姿态信息融合方法摘要姿态信息融合在现代导航系统和机器人控制系统中具有重要的作用。本论文提出了一种基于卡尔曼滤波的姿态信息融合方法。该方法使用传感器测量值和系统动力学方程推导出状态方程和观测方程,并采用卡尔曼滤波进行姿态信息融合。实验结果表明,该方法能够获得更准确和稳定的姿态信息,具有很高的实用性和可靠性。关键词:姿态信息融合;卡尔曼滤波;状态方程;观测方程。引言随着现代导航技术的发展和机器人控制技术的应用,高精度姿态信息对于确保系统的准确性和稳定性变得至关重要。传感器是获取姿态信息的重